一种基于航拍无人机的共享系统
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及共享系统领域,尤其涉及的是一种基于航拍无人机的共享系统。
背景技术
如今,不少有条件的人在出门旅游时都会携带航拍无人机,消费级航拍无人机往往要在轻重量、长续航、小体积、低成本、强劲的抗风能力等相互矛盾的指标之间纠结;但即便这样,消费级航拍无人机在加上保护盒之后的体积仍然较大,成为旅行中的负担;使用航拍无人机的地点主要集中于一些旅游风景区、大学学校校园以及各地的地标建筑物附近,旅途中的航拍无人机使用者,也通常不熟悉当地的地形地貌、风向、气候等情形,贸然起飞航拍无人机,往往会造成航拍无人机坠毁;航拍无人机的使用者在大多数情况下,只需要从天空中某个特定的角度或者沿着特定的镜头轨迹去拍摄自己或者特定景物,然后获得画面即可,而并非仅仅想体验操纵航拍无人机的感觉,因为操纵航拍无人机之前大都需要接受一定的学习和练习,同时还要承担航拍无人机可能发生坠毁等事故的损失。
因此,现有技术尚有待改进和发展。
发明内容
为解决上述技术问题,本发明提供一种基于航拍无人机的共享系统,即使用户没有携带航拍无人机仍能够获得航拍的影像和画面,且无需经受专门的练习和训练,也无需担心航拍无人机电池没电和承担航拍无人机可能发生坠毁事故的损失。
本发明的技术方案如下:一种基于航拍无人机的共享系统,包括主机、客户端和无人机基地,无人机基地内都布设有多架航拍无人机,客户端通过在其内安装的相应APP与主机相互通信和交换数据,主机通过网络与无人机基地及其内的航拍无人机相互通信和交换数据;该基于航拍无人机的共享系统包括位置判别模块、无人机选择模块、飞行控制模块、无人机状态模块和飞行判别模块;其中,
位置判别模块用于判别用户需要服务的位置是否在某个无人机基地服务区内,如果不在,将反馈无法提供服务,如果在,将反馈可以提供服务的无人机基地;
无人机状态模块用于监控无人机基地内的航拍无人机的状态,并反馈相应数据;
无人机选择模块用于当位置判别模块反馈某无人机基地后,根据无人机状态模块反馈的对应的无人机基地内的航拍无人机状态数据,选出适合执行此次任务的航拍无人机;
飞行判别模块用于对飞行时空的合适程度进行判断;
飞行控制模块用于对航拍无人机进行控制,为航拍无人机的第一控制端;
无人机选择模块由内置的算法子模块选择出最合适的航拍无人机,或者将适合的航拍无人机发送至客户端,由客户做出选择。
所述的基于航拍无人机的共享系统,其中:若由算法子模块选择出最合适的航拍无人机,则该算法子模块涉及的航拍无人机状态参数有续航时间、最大抗风等级和最大飞行高度,且该算法子模块结合Java和Python语言编程软件实现以下操作:
第1步、判断用户请求服务的时间和空间是否合法,如果不合法,就反馈不能服务,否则进入下一步;
第2步、根据用户提供的时间和空间信息,调取此时空间的天气预报,如果天气恶劣,就反馈不能服务,否者进入下一步;
第3步、读取第2步所使用的天气数据中最大风速Vo,并从所有航拍无人机名单中剔除所有抗风等级小于Vo的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第4步、根据用户需要提供服务地点的海拔高度Ho,从名单中剔除所有最大飞行高度小于Ho的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第5步、计算出用户预约的服务时长以及从基地往返服务地点的时长总和,并将和值乘以安全系数1.3,得出最小飞行时长To,从名单中剔除所有剩余能量续航时间小于To的无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第6步、从名单中剔除不符合用户预约的拍摄清晰度、镜头变焦、自动跟踪性能的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第7步、如果航拍无人机名单中有不止一架航拍无人机,就随机选择一架航拍无人机。
所述的基于航拍无人机的共享系统,其中:还包括数据存储器,用于对航拍无人机导出的数据进行存储,并将数据通过主机传递给用户;数据存储器位于无人机基地内,或者设立在可被网络连接的其他地方。
所述的基于航拍无人机的共享系统,其中:无人机状态模块分为飞行状态和拍摄状态,且飞行状态包括剩余能量、续航时间、最大飞行高度和最大速度四个部分,且拍摄状态包括拍摄清晰度、镜头变焦和自动跟踪拍摄性能三个部分,且飞行状态和拍摄状态相对无人机状态完全独立。
所述的基于航拍无人机的共享系统,其中:无线网络分为公共无线网络和专用无线网络,且公共无线网络包括4G网络和5G网络,且航拍无人机选择信号强度最强的网络进行网络连接。
所述的基于航拍无人机的共享系统,其中:飞行控制模块和用户均可控制航拍无人机,且飞行控制模块的控制优先于用户的控制,将飞行控制模块作为第一控制端,用户使用的客户端作为第二控制端。
所述的基于航拍无人机的共享系统,其中:还包括中继器选择模块,用于判断某次飞行的航拍无人机的无线电联系是否会受到障碍物阻隔,信号强度稳定度是否满足要求,是否需要使用信号中继器,所需中继器的数量,是否需要中继无人机,以及中继无人机的数量和位置。
所述的基于航拍无人机的共享系统,其中:还包括气象数据模块,气象数据模块包括气象测量装置,气象测量装置安装在无人机基地内、或者无人机基地所服务的区域内、或者其他无人机上,用于测量本无人机基地服务区域内的气象资料;并为飞行控制模块提供飞行数据,避免航拍无人机遭受恶劣气流。
所述的基于航拍无人机的共享系统,其中:还包括地理数据模块,地理数据模块包括地形测量装置,地形测量装置用于获得本无人机基地服务区内的地形和障碍物数据,并为飞行控制模块提供飞行数据,避免航拍无人机撞击障碍物。
所述的基于航拍无人机的共享系统,其中:还包括护卫无人机模块和护卫无人机,通过护卫无人机模块控制护卫无人机飞行,护卫无人机飞行在航拍无人机的周围,用于辅助收集航拍无人机所处位置的气候和障碍物数据,并且监视航拍无人机可能受到的攻击。
与现有技术中的共享无人机系统相比,本发明基于航拍无人机的共享系统的有益效果是:
1、设置有客户端,用户可将自身需求输入客户端进行查询,查找是否有符合的共享无人机,满足需求的无人机飞到用户指定地点和高度后,接受用户控制,该共享系统解决了无人机体积较大、不便于用户携带的问题,方便了用户进行旅途拍摄等特定拍摄需求,减轻了旅行中的负担;
2、设置有飞行控制模块,可对飞行的时间、空间要素进行分析,并结合气象和地理数据对无人机飞行进行调控,该无人机系统降低了人为操作负担,使用较为简单,不需要对当地的地形、风向、气候等情形进行研究分析,操作无人机不需要接受一定的学习和练习,也不需要承担无人机坠毁等事故的损失。
附图说明
在此描述的附图仅用于解释目的,而非意图以任何方式来限制本发明公开的范围;图中各部件的形状和比例尺寸等仅为示意性的,用于帮助对本发明的理解,并非是具体限定本发明各部件的形状和比例尺寸;本领域的技术人员在本发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本发明。
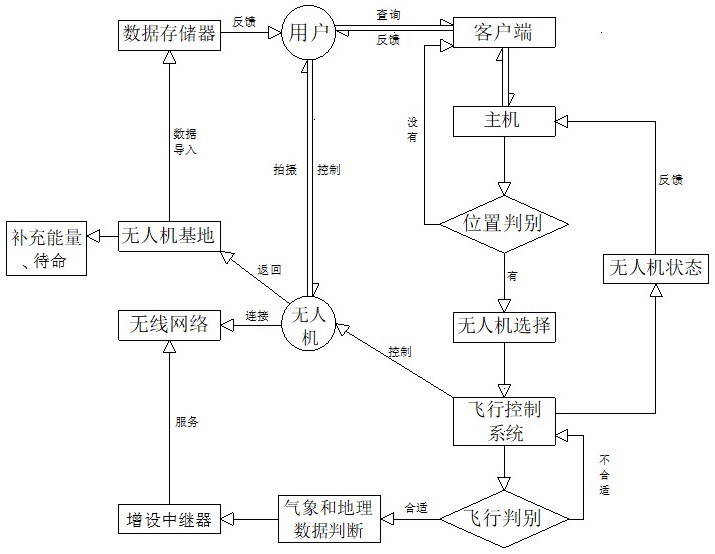
图1是本发明基于航拍无人机的共享系统的整体流程示意图;
图2是本发明基于航拍无人机的共享系统所用无人机状态分类示意图;
图3是本发明基于航拍无人机的共享系统所用无线网络分类示意图;
图4是本发明基于航拍无人机的共享系统所用飞行判别工作流程示意图。
具体实施方式
以下将结合附图,对本发明的具体实施方式和实施例加以详细说明,所描述的具体实施例仅用以解释本发明,并非用于限定本发明的具体实施方式。
如图1所示,图1是本发明基于航拍无人机的共享系统的整体流程示意图,该基于航拍无人机的共享系统包括主机、客户端和无人机基地;无人机基地分别建立在多个旅游风景区、校园以及各地地标建筑物的附近或周边,且每个无人机基地内都布设有多架航拍无人机;客户端包括但不限于用户使用的手机、平板、笔记本等智能移动终端,通过在其内安装的相应APP与主机相互通信和交换数据;主机为云服务器,通过因特网、局域网等网络与无人机基地及其内的航拍无人机相互通信和交换数据。
具体的,客户端用于用户查询以及反馈用户,可将用户的查询和选择传递给主机,并将主机的反馈信息提供给用户,是用户和主机之间的中介;而主机可对用户需求和系统反馈进行处理,是整个共享系统的核心部分,相当于整个共享系统的“大脑”,包含有多种处理算法,用于对用户需求进行判别、分析,以及将系统的分析结果通过客户端反馈给用户。
本发明基于航拍无人机的共享系统的创新点在于,还包括位置判别模块、无人机选择模块、飞行控制模块、无人机状态模块、飞行判别模块、中继器选择模块、气象数据模块和地理数据判断模块、数据存储器;其中,
位置判别模块用于判别用户需要服务的位置是否在某个无人机基地服务区内;若不在则反馈无法提供服务给无人机选择模块,若在则反馈可以提供服务的无人机基地的代号或代码给无人机选择模块;
无人机选择模块用于在收到位置判别模块反馈的无人机基地代号或代码之后,根据无人机状态模块所提供的对应该无人机基地内的航拍无人机状态数据,选出适合执行此次任务的航拍无人机;
飞行控制模块相对于主机而言是整个共享系统的第二核心,飞行控制模块用于根据需要调整航拍无人机状态,并将无人机基地内航拍无人机的当前状态反馈给主机供用户进行航拍无人机选择;同时,飞行控制模块还对航拍无人机进行控制,且为航拍无人机的第一控制端,飞行判别模块也受控于飞行控制模块;
无人机状态模块用于监控无人机基地内的航拍无人机的状态,并反馈相应数据;无人机状态模块实时记录航拍无人机每次飞行的状态数据,是用户进行航拍无人机选择的主要依据;
飞行判别模块用于对飞行时空的合适程度进行判断,飞行判别合适后进行气象数据和地理数据判断,是飞行控制模块的主要判别依据之一;
中继器选择模块用于判断某次飞行的航拍无人机的无线电联系是否会受到障碍物阻隔,信号强度稳定度是否满足要求,是否需要使用信号中继器,以及所需中继器的数量,飞行控制模块也会分析出是否需要中继无人机(即载有信号中继器的无人机)及其数量和位置,并为飞行控制模块提供飞行数据,避免航拍无人机遭受恶劣气流和撞击而没有被发现的障碍;
气象数据模块包括气象测量装置,气象测量装置安装在无人机基地内、或者无人机基地所服务的区域内、或者其他无人机上,用于测量本无人机基地服务区域内的气象资料;并为飞行控制模块提供飞行数据,避免航拍无人机遭受恶劣气流;
地理数据模块包括地形测量装置,地形测量装置用于获得本无人机基地服务区内的地形和障碍物数据,并为飞行控制模块提供飞行数据,避免航拍无人机撞击障碍物。
无人机基地是存放航拍无人机和为航拍无人机补充能量的场所,也是航拍无人机起飞和降落的场所,无人机基地内的航拍无人机在没有飞行任务时,则停在基地内补充能量和检查故障,并导出上次任务所拍摄的数据。
数据存储器用于对航拍无人机导出的数据进行存储,并将数据通过主机传递给用户,数据存储器既可以位于无人机基地内,也可设立于可被网络连接的其他地方。
较好的是,无人机选择模块还用于根据气象数据和地理数据以及用户的需求,由内置的算法子模块选择出最合适的航拍无人机;或者根据气象数据和地理数据以及用户需求,筛选出所有适合的航拍无人机,并通过主机发送至客户端,由客户做出选择。
若由算法子模块选择出最合适的航拍无人机,则该算法子模块涉及的航拍无人机状态参数有续航时间、最大抗风等级和最大飞行高度,且该算法子模块结合Java和Python语言编程软件实现以下操作:
第1步、判断用户请求服务的时间和空间是否合法,如果不合法,就反馈不能服务,否则进入下一步;
第2步、根据用户提供的时间和空间信息,调取此时空间的天气预报,如果天气恶劣,就反馈不能服务,否者进入下一步;
第3步、读取第2步所使用的天气数据中最大风速Vo,并从所有航拍无人机名单中剔除所有抗风等级小于Vo的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第4步、根据用户需要提供服务地点的海拔高度Ho,从名单中剔除所有最大飞行高度小于Ho的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第5步、计算出用户预约的服务时长以及从基地往返服务地点的时长总和,并将和值乘以安全系数1.3,得出最小飞行时长To,从名单中剔除所有剩余能量续航时间小于To的无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第6步、从名单中剔除不符合用户预约的拍摄清晰度、镜头变焦、自动跟踪性能的航拍无人机;如果航拍无人机名单为空,就反馈无法服务,否者进入下一步;
第7步、如果航拍无人机名单中有不止一架航拍无人机,就随机选择一架航拍无人机。
结合图2所示,图2是本发明基于航拍无人机的共享系统所用无人机状态分类示意图,具体的,无人机状态模块分为飞行状态和拍摄状态,且飞行状态包括剩余能量、续航时间、最大飞行高度和最大速度四个部分,且拍摄状态包括拍摄清晰度、镜头变焦和自动跟踪拍摄性能三个部分,且飞行状态和拍摄状态对无人机状态的影响完全独立,通过对飞行状态和拍摄状态进行统计反馈,方便了用户对航拍无人机进行选择。
结合图3所示,图3是本发明基于航拍无人机的共享系统所用无线网络分类示意图,具体的,无线网络分为公共无线网络和专用无线网络,且公共无线网络包括4G网络和5G网络,且航拍无人机优先选择信号强度最强的网络进行网络连接,通过设置的公共无线网络和专用无线网络,使得航拍无人机可尽量连接到信号较强的网络,方便了控制航拍无人机。
结合图4所示,图4是本发明基于航拍无人机的共享系统所用飞行判别工作流程示意图,具体的,飞行判别模块的判别要素为时间和空间,并根据用户提供的时间、空间判断是否合法、安全,且合法判别的重要程度高于安全判别,通过飞行判别模块,大大降低了航拍无人机出现损坏、失控等意外情况的概率。
需要说明的是,飞行控制模块和用户均可控制航拍无人机,且飞行控制模块的控制优先于用户的控制,将飞行控制模块作为第一控制端,用户使用的客户端作为第二控制端,可避免用户操作不当导致航拍无人机损坏。
请参阅图1并结合图2至图4,本发明基于航拍无人机的共享系统的使用方法和工作原理是:
第一步、客户端通过无线网络联系主机,用户通过客户端询问主机,用户指定的位置是否在某个无人机基地服务区内;
第二步、如果在某个基地服务区内,主机将通过客户端通知可供使用的航拍无人机及其状态,无人机状态模块包括飞行状态和拍摄状态;其中,飞行状态分为剩余能量、续航时间、最大飞行高度、最大速度;拍摄状态分为拍摄清晰度、镜头变焦、自动跟踪过拍摄性能;
第三步、用户通过客户端在主机中选定航拍无人机,主机向与此航拍无人机对应的飞行控制模块发出通知,告知飞行控制模块需要服务的时间和地点;
飞行控制模块判断提客户请求的时间和空间是否合法、安全,是否是禁飞区,是否超过限高,如果合法,将判断用户请求的时间和空间是否安全,飞行控制模块将根据气象数据和地形障碍物数据判断飞行是否安全,如果用户请求的飞行时间和空间不合法或不安全,则飞行控制模块将通知主机和客户端不能飞行,否者将进入第四步;
第四步、飞行控制模块根据气象数据和地理数据判断,此次飞行的航拍无人机的无线电联系是否会受到障碍物阻隔,信号强度稳定度是否满足要求,是否需要使用信号中继器,以及需要几个中继器;信号中继器可以是固定在基地周围的不动产上,也可以由其他无人机携带的,专门的信号中继无人机飞行控制模块也会分析出中继无人机在本次任务中所处的位置;
第五步、如果以上步骤都满足,飞行控制模块会控制航拍无人机躲避障碍物与恶劣气流,在指定的时间赶到指定位置,航拍无人机连接无线网络连接,无线网络可以是公共通信网络(比如4G或5G网络),也可以是专用的无线通信网络,航拍无人机将优先连接信号较强的网络;
第六步、航拍无人机飞到用户指定地点和高度后,飞行控制模块将待命,接受用户控制,飞行控制模块判断航拍无人机处于安全的空间和时间时,可以接受来自客户端的控制,改变航拍无人机空间位置和飞行数据,期间航拍无人机如面临危险或潜在危险时,如航拍无人机的遇到气流突变,大风或是超出合法空间,或靠近障碍物等情形,飞行控制模块将拒绝用户控制,使航拍无人机飞回安全的空间和状态,当再次安全时,重新接受用户控制;
同时,航拍无人机也可以根据需要增设有护卫无人机伴飞,并通过护卫无人机模块控制飞行,护卫无人机用于辅助收集航拍无人机所处位置更精确的气流和障碍物等数据和信息,并且监视航拍无人机可能受到的攻击;
第七步、飞行过程中拍摄的高清视频数据存储在航拍无人机的存储器中,通过无线网络传给用户;
第八步、用户结束服务后,飞行控制模块控制航拍无人机返回基地补充能量,或者继续执行下个飞行任务。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
应当理解的是,以上所述仅为本发明的较佳实施例而已,并不足以限制本发明的技术方案,对本领域普通技术人员来说,在本发明的精神和原则之内,可以根据上述说明加以增减、替换、变换或改进,而所有这些增减、替换、变换或改进后的技术方案,都应属于本发明所附权利要求的保护范围。
- 一种基于航拍无人机的共享系统
- 一种基于暗通道先验的无人机航拍图像去雾与增强方法