可移动悬臂吊
文献发布时间:2023-06-19 12:21:13
技术领域
本申请涉及吊装设备领域,具体涉及一种可移动悬臂吊,以及一种用于吊装液冷设备的可移动悬臂吊。
背景技术
云计算技术的高速发展,对服务器计算性能的要求越来越高。服务器性能提升的同时,功耗呈现急速上升之势,也使得数据中心的热量呈上升趋势。
现有的对数据中心的服务器进行散热的技术手段通常采用浸没液冷技术,主要包括双相浸没液冷技术和单相浸没液冷技术。其中,数据中心的内部人员在工作业中经常需要一些辅助设备协助人工作业,以将服务器、路由器等电子设备浸没到盛放有不导电液体介质的容器中。在协助人工作业中,臂吊车经常被用来吊装一些体积较大的服务器。
但是,现有的臂吊车的整车的高度是在出厂时装配好的,这样就使得该高度的臂吊车只能在对应高度规格下的数据中心中作业;若当数据中心中需要将服务器吊装于不同的高度时,则需要增加对应高度的臂吊车,这样不仅增加了臂吊车的投入成本,也降低了臂吊车的使用率。
发明内容
本申请实施例提供一种可移动悬臂吊,以解决现有技术中悬臂吊车的使用成本较高,使用率低的问题。本申请实施例还提供一种用于吊装液冷设备的可移动悬臂吊。
本申请实施例提供一种可移动悬臂吊,包括:车体、悬臂装置以及升降装置;
所述悬臂装置安装在所述车体,可以随所述车体移动;
所述升降装置安装在所述车体,并与所述悬臂装置连接,以带动所述悬臂装置在高度方向上的移动。
可选的,所述升降装置包括升降电机、动力传输机构以及丝杠机构;
所述升降电机安装在所述车体上,所述动力传输机构的输入端连接所述升降电机的输出端,所述丝杠机构沿垂直方向设置,所述丝杠机构的丝杠的输入端连接所述动力传输机构的输出端,所述丝杠机构的螺母与所述悬臂装置的可升降柱固定连接;通过所述可升降柱的移动实现带动所述悬臂装置在高度方向上的移动。
可选的,所述升降装置还包括导向轮组,所述导向轮组设置在所述悬臂装置的支撑立柱的壁体上,所述支撑立柱沿高度方向安装在所述车体上,所述可升降柱位于所述支撑立柱的内部;通过所述导向轮组,所述可升降柱获得在所述支撑立柱的内部沿高度方向的可移动的支撑。
可选的,所述动力传输机构包括蜗轮蜗杆机构。
可选的,所述悬臂装置包括根臂吊,所述根臂吊包括根臂转轴、根臂臂吊支架和根臂制动装置;
所述根臂转轴设置在所述可升降柱的顶部,所述根臂臂吊支架的连接端与所述根臂转轴连接,以使所述根臂臂吊支架围绕所述根臂转轴旋转;所述根臂制动装置通过所述根臂臂吊支架与所述根臂转轴连接,以实现所述根臂制动装置对于所述根臂转轴的制动。
可选的,所述悬臂装置包括至少一节可折臂吊。
可选的,所述可折臂吊包括折臂转轴、折臂臂吊支架和折臂制动装置;
所述折臂转轴设置在所述根臂吊的根臂臂吊支架的摆动端,或者设置在前一节所述可折臂吊的折臂臂吊支架的摆动端;所述折臂臂吊支架的连接端与所述折臂转轴连接,以使所述折臂臂吊支架围绕所述折臂转轴旋转;所述折臂制动装置通过所述折臂臂吊支架与所述折臂转轴连接,以实现所述折臂制动装置对于所述折臂转轴的制动。
可选的,所述根臂制动装置、所述折臂制动装置受由所述可移动悬臂吊使用者操作的控制装置控制,并且,在所述控制装置的控制下,同时处于制动状态,或者同时处于放松状态;所述根臂制动装置、所述折臂制动装置默认处于制动状态,在需要所述悬臂装置旋转时,通过所述控制装置控制所述根臂制动装置和所述折臂制动装置的线圈得电,使所述根臂制动装置、所述折臂制动装置松开。
可选的,所述悬臂装置还包括卷绳机构,所述卷绳机构包括卷绳器、吊绳以及吊钩;所述卷绳器设置在所述根臂臂吊支架的连接端;从所述卷绳器伸出的所述吊绳沿所述根臂臂吊支架和所述折臂臂吊支架的摆动端布置,并连接所述吊钩。
可选的,所述悬臂装置还包括臂吊障碍物传感器,所述臂吊障碍物传感器设置在所述根臂臂吊支架或所述折臂臂吊支架上。
可选的,所述车体包括承载平台,所述承载平台能够承接所述悬臂装置移到其上的被吊件。
可选的,所述承载平台包括积液支撑板和液体收集箱;所述积液支撑板设置在所述车体的顶部端面,所述积液支撑板形成有若干漏液通孔;所述液体收集箱设置在所述车体的内部,所述液体收集箱底部开设有排液口,所述积液支撑板和所述液体收集箱通过导液管连接。
可选的,所述车体包括设置在所述车体的底部的全向轮。
可选的,所述车体包括设置在所述车体的边角的支撑调整装置,所述支撑调整装置用于调整所述车体的高度。
可选的,所述支撑调整装置包括连接转轴、连接座、驱动机构和支撑脚;
所述连接座通过所述连接转轴活动连接在所述车体的边角,所述驱动机构设置在所述连接座上,并与所述支撑脚连接;通过所述驱动机构能够带动所述连接转轴旋转,并可使所述连接座的位置升高或者降低,从而改变所述车体的高度。
可选的,所述车体包括设置在所述车体上的电能储备机构,所述电能储备机构包括超级电容、充电收纳装置以及供电装置;所述充电收纳装置设置在所述车体上,所述超级电容设置在所述充电收纳装置内,所述供电装置与所述超级电容连接。
可选的,所述充电收纳装置包括设置在所述车体的侧板位置的电缆收纳结构。
可选的,还包括:设置在所述车体上的预警装置,所述预警装置包括预警显示装置或预警播放装置。
可选的,所述车体包括防撞装置,所述防撞装置设置在所述车体的底部的边缘位置。
本申请实施例还提供一种用于吊装液冷设备的可移动悬臂吊,包括:车体、悬臂装置以及升降装置;所述悬臂装置安装在所述车体,可以随所述车体移动;所述悬臂装置可以吊装所述液冷设备;所述升降装置安装在所述车体,并与所述悬臂装置连接,以带动所述悬臂装置在高度方向上的移动,从而带动所述悬臂装置吊装的所述液冷设备在高度方向上的移动。
可选的,所述车体包括承载平台,所述承载平台能够承接所述悬臂装置移到其上的所述液冷设备。
可选的,所述承载平台包括积液支撑板和液体收集箱;所述积液支撑板设置在所述车体的顶部端面,所述积液支撑板形成有若干漏液通孔;所述液体收集箱设置在所述车体的内部,所述液体收集箱底部开设有排液口,所述积液支撑板和所述液体收集箱通过导液管连接。
与现有技术相比,本申请实施例具有以下优点:
本申请实施例提供一种可移动悬臂吊,包括:车体、悬臂装置以及升降装置;所述悬臂装置安装在所述车体上,能够随所述车体移动;所述升降装置安装在所述车体上,并与所述悬臂装置连接,以带动所述悬臂装置在高度方向上的移动。本申请实施例通过车体的全方位的移动,将设置在车体上的悬臂装置移动到指定区域,并通过升降装置调整悬臂装置的高度,从而使得悬臂装置位于指定的高度位置上,再通过悬臂装置将被吊件吊装到指定位置,进而使得可移动悬臂吊能够适应不同吊装高度的工作场合,提升了可移动悬臂吊的使用率,也降低了可移动悬臂吊使用投入成本。
附图说明
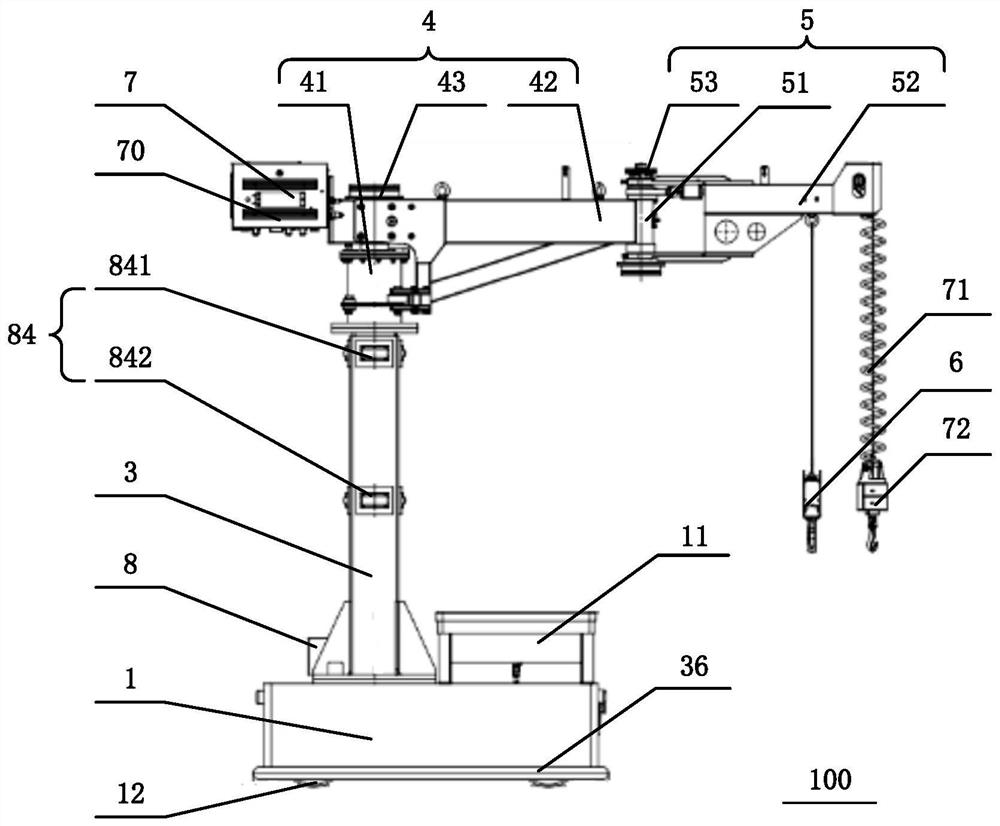
图1是本申请实施例提供的可移动悬臂吊的主视图。
图2是本申请实施例提供的可移动悬臂吊的侧视图。
图3是本申请实施例提供的可移动悬臂吊的俯视图。
图4是本申请实施例提供的可移动悬臂吊的部分结构的内部结构示意图。
图5是本申请实施例提供的又一种可移动悬臂吊的结构示意图。
图6是图5中A处放大的局部示意图。
其中,可移动悬臂吊100,车体1,承载平台11,积液支撑板111,液体收集箱112,导液管113,全向轮12,支撑调整装置2,连接转轴21,连接座22,支撑脚23,悬臂装置3,可升降柱31,支撑立柱32,根臂吊4,根臂转轴41,根臂臂吊支架42,根臂制动装置43,可折臂吊5,折臂转轴51,折臂臂吊支架52,折臂制动装置53,控制装置6,卷绳机构7,卷绳器70,吊绳71,吊钩72,臂吊障碍物传感器33,电能储备机构34,电缆收纳结构341,预警装置35,防撞装置36,操作面板37,升降装置8,升降电机81,动力传输机构82,丝杠机构83,丝杠831,螺母832,导向轮组84,第一导向轮组841,第二导向轮组842。
具体实施方式
在下面的描述中阐述了很多具体细节以便于充分理解本申请实施例。但是本申请实施例能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本申请实施例内涵的情况下做类似推广,因此本申请实施例不受下面公开的具体实施的限制。
本申请实施例提供一种可移动悬臂吊,如图1、图2、图3和图4所示,其中,图1是本申请实施例提供的可移动悬臂吊的主视图,图2是本申请实施例提供的可移动悬臂吊的侧视图,图3是本申请实施例提供的可移动悬臂吊的俯视图,图4是本申请实施例提供的可移动悬臂吊的部分结构的内部结构示意图。
在本申请实施例中,可移动悬臂吊100可以协助数据中心的现场运维人员完成液冷存储设备、液冷服务器设备以及其它液冷IT(Information Technology,信息技术)设备的安装、维护等。例如,可以协助运维人员移除IT设备中的液冷服务箱,再例如,可以协助运维人员将液冷服务器移动至液冷服务箱中。
在本申请实施例中,可移动悬臂吊100包括:车体1、悬臂装置3以及升降装置8。其中,悬臂装置3安装在车体1上,能够随车体1移。升降装置8安装在车体1上,并与悬臂装置3连接,以带动悬臂装置3在高度方向上的移动。
具体的,在本申请实施例中,悬臂装置3可以实现将被吊件(液冷存储设备、液冷服务器设备等)吊装到指定位置,请结合图1至图4所示,悬臂装置3包括有支撑立柱32,该支撑立柱32的固定端与车体1的顶部端面固定连接,以使支撑立柱32能够垂直于车体1且安装在车体1上,支撑立柱32靠近车体1的后侧设置。其中,支撑立柱32为空心结构,其内部还设置有可升降柱31,可升降柱31的部分区域或是整体也设置为空心结构,该可升降柱31可通过升降装置8在支撑立柱32的内部沿高度方向移动,以实现对于悬臂装置3整体高度的调整。
其中,升降装置8包括升降电机81、动力传输机构82以及丝杠机构83。具体的,升降电机81安装在车体1上,具体可以安装在靠近支撑立柱32的位置,动力传输机构82的输入端连接升降电机81的输出端,动力传输机构82包括蜗轮蜗杆机构。丝杠机构83沿垂直方向设置,丝杠机构83至少包括丝杠831和螺母832,具体连接设置为,丝杠机构83的丝杠831沿垂直方向(等同于高度方向)设置,丝杠831的输入端连接动力传输机构82的输出端,与丝杠831的输入端相对的一端设置在可升降柱31的空心结构内,以使得丝杠831可在可升降柱31的空心结构内旋转,从而使丝杠机构83的螺母832能够移动。丝杠机构83的螺母832与可升降柱31的固定端固定连接,可升降柱31的固定端为可升降柱31靠近车体1的一端,通过丝杠机构83带动可升降柱31的移动,从而实现带动悬臂装置3在高度方向上的移动,即在高度方向上实现对悬臂装置3的高度调整。
当然,在本申请实施例的其它方案中,升降装置8还可以是其它装置,例如采用气压或液压的升降装置,以气压升降装置(未示出)为例,气压升降装置包括气压缸和升降杆,气压缸可以安装在车体1的顶部端面且位于支撑立柱32的内部,气压缸的输出端与升降杆的第一连接端连接,与升降杆的第一连接端相对的第二连接端与可升降柱31的固定端连接,从而通过气压缸带动升降杆的移动,带动可升降柱31的移动,从而实现带动悬臂装置3在高度方向上的移动,即在高度方向上实现对悬臂装置3的高度调整。能够实现带动可升降柱31移动的升降装置8还有很多,本申请实施例在此不一一举出,只要是能够实现带动可升降柱31移动的装置,均是本申请实施例所要保护的范围。
可以理解的是,由于可升降柱31和支撑立柱32的高度较高,为了使得可升降柱31在升降装置8的带动下移动的更加平稳,则升降装置8还包括导向轮组84。具体的,导向轮组84设置在支撑立柱32的壁体上,且考虑到支撑立柱32为方体结构,所以为了使得可升降柱31不仅能够获得在高度方向上的导向作用,还能够获得在水平方向上的支撑作用,则导向轮组84分段间隔且环绕支撑立柱32的壁体设置,即导向轮组84至少包括第一导向轮组841和第二导向轮组842,第一导向轮组841设置在靠近支撑立柱32的支撑端的位置,第二导向轮组842设置在与支撑立柱32的支撑端相对的固定端位置。当然,第一导向轮组841和第二导向轮组842具体设置在支撑立柱32上的位置还有很多,本申请实施例对此不作具体的限定。在本申请实施例中,以第一导向轮组841为例,第一导向轮组841可以包括四个导向轮,每个导向轮对应设置在支撑立柱32的一面壁体上,导向轮的周向端面与可升降柱31的周向端面接触,以实现对可升降柱31的可移动的支撑和导向作用。当然,在本申请实施例的其它方案中,第一导向轮组841的导向轮的数量还可以是其它,只要是能够实现对于可升降柱31的可移动的支撑和导向作用,均是本申请实施例所要保护的范围。
在本申请实施例中,为了实现对被吊件的吊装,悬臂装置3具体包括根臂吊4,根臂吊4不仅可以对被吊件进行吊装,还可以实现将被吊件在平行于车体1的顶部端面的水平面上的移动。具体的,根臂吊4包括根臂转轴41、根臂臂吊支架42和根臂制动装置43,其中,根臂转轴41设置在可升降柱31的顶部,能够随可升降柱31在高度方向上的移动而移动,根臂臂吊支架42的连接端与根臂转轴41连接,以使根臂臂吊支架42围绕根臂转轴41旋转,根臂臂吊支架42的旋转角度可以为0~360°;根臂制动装置43通过根臂臂吊支架42与根臂转轴41连接,以实现根臂制动装置43对于所述根臂转轴41的制动。进一步的,在本申请实施例的其它方案中,根臂吊4还可以包括根臂驱动电机(未示出),该根臂驱动电机的固定端可与可升降柱31固定连接,根臂驱动电机的输出端连接于根臂转轴41,以通过根臂驱动电机的转动带动根臂转轴41转动,从而实现根臂吊4的自动转动。
在本申请实施例中,由于根臂臂吊支架42具有一定的长度,若将吊钩72直接设置在根臂臂吊支架42的摆动端,则会使得吊钩72所移动的范围受到限制,其中,根臂臂吊支架42的摆动端与根臂臂吊支架42的连接端为相对端关系。为了避免这一情况的发生,本申请实施例的悬臂装置3还包括至少一节可折臂吊5。其中,可折臂吊5包括折臂转轴51、折臂臂吊支架52和折臂制动装置53。
具体的,若该可折臂吊5为(第一节)可折臂吊5,则第一节可折臂吊5的折臂转轴51设置在根臂吊4的根臂臂吊支架42的摆动端,第一节可折臂吊5的折臂臂吊支架52的连接端与第一节可折臂吊5的折臂转轴51连接,以使第一节可折臂吊5的折臂臂吊支架52围绕第一节可折臂吊5的折臂转轴51旋转;第一节可折臂吊5的折臂制动装置53通过第一节可折臂吊5的折臂臂吊支架52与第一节可折臂吊5的折臂转轴51连接,以实现第一节可折臂吊5的折臂制动装置53对于第一节可折臂吊5的折臂转轴51的制动。若该可折臂吊5为(第二节)可折臂吊5,则第二节可折臂吊5的折臂转轴51设置在前一节(第一节)可折臂吊5的折臂臂吊支架52的摆动端上;第二节可折臂吊5的折臂臂吊支架52的连接端与第二节可折臂吊5的折臂转轴51连接,以使第二节可折臂吊5的折臂臂吊支架52围绕第二节可折臂吊5的折臂转轴51旋转;第二节可折臂吊5的折臂制动装置53通过第二节可折臂吊5的折臂臂吊支架52与第二节可折臂吊5的折臂转轴51连接,以实现第二节可折臂吊5的折臂制动装置53对于第二节可折臂吊5的折臂转轴51的制动。以此类推,第三节可折臂吊5与第二节可折臂吊5的连接,第四节可折臂吊5的与第三节可折臂吊5的连接等,从而使得可折臂吊5的所能够移动覆盖的范围区域更多。其中,折臂臂吊支架52的旋转角度为0~360°。
进一步的,在本申请实施例的其它方案中,可折臂吊5还包括可折臂驱动电机,该可折臂驱动电机的固定端可与根臂臂吊支架42的摆动端固定连接,或是与前一节的折臂臂吊支架52的摆动端固定连接。可折臂驱动电机的输出端连接于折臂转轴51,以通过可折臂驱动电机的转动带动折臂转轴51转动,从而实现可折臂吊5的自动转动。当然,若在没有根臂驱动电机、可折臂驱动电机的驱动下,根臂臂吊支架42和折臂臂吊支架52可通过手动方式实现转动。
在申请实施例中,需要说明的是,根臂制动装置43、折臂制动装置53受由可移动悬臂吊100使用者(运维人员)操作的控制装置6控制,并且,在控制装置6的控制下,同时处于制动状态,或者同时处于放松状态。根臂制动装置43、折臂制动装置53默认处于制动状态,在需要悬臂装置3旋转时,通过控制装置6控制根臂制动装置43和折臂制动装置53的线圈得电,使根臂制动装置43、折臂制动装置53松开。
当然,在本申请实施例的其它方案中,控制装置6还可以单独分别控制根臂制动装置43、折臂制动装置53的制动或松开,例如,吊装一个被吊件,折臂臂吊支架52上的吊钩72吊装有被吊件,当需要将被吊件移动到指定位置时,首先,折臂制动装置53将折臂转轴51和折臂臂吊支架52制动,根臂制动装置43将根臂转轴41和根臂臂吊支架42松开,在根臂臂吊支架42绕根臂转轴41旋转第一预设角度后,根臂制动装置43将根臂转轴41和根臂臂吊支架42制动。然后,折臂制动装置53将折臂转轴51和折臂臂吊支架52松开,在折臂臂吊支架52绕折臂转轴51旋转第二预设角度后到达指定位置,再对折臂转轴51和折臂臂吊支架52进行制动。本申请实施例的控制装置6可以设置在折臂臂吊支架52或根臂臂吊支架42上,也可以脱离可移动悬臂吊100设置。即控制装置6设置在折臂臂吊支架52或根臂臂吊支架42上时,可以是有线方式连接,当控制装置6脱离可移动悬臂吊100设置即为无线方式连接。
在本申请实施例中,为了使得吊钩72能够自动的升降在指定的高度位置,则悬臂装置3还包括卷绳机构7,卷绳机构7还包括卷绳器70和吊绳71,吊钩72可以是卷绳机构7中的结构。其中,卷绳器70设置在根臂臂吊支架42的连接端,从卷绳器70伸出的吊绳71沿根臂臂吊支架42和折臂臂吊支架52的摆动端布置,并连接吊钩72。卷绳器70为自动控制机构,其可以被运维人员控制的控制装置6控制,进而在接收到控制装置6的指令下通过吊绳71带动吊钩72升降于指定的高度位置。
在本申请实施例中,为了防止悬臂装置3在移动的过程中碰到障碍物,悬臂装置3还包括臂吊障碍物传感器33,臂吊障碍物传感器33设置在根臂臂吊支架42或折臂臂吊支架52上。臂吊障碍物传感器33可以是激光传感器、超声波传感器,或者其它类型的传感器,只要是用于探测障碍物,均是本申请实施例所要保护的范围。
在本申请实施例中,基于悬臂装置3是设置在车体1上的,所以车体1可以带动悬臂装置3移动到吊装被吊件的大致的指定位置。请参考图1至图4所示,车体1的整体结构呈立方体,车体1的外部设置有保护壳,在保护壳内部的底部从侧边向内凹陷形成有全向轮安装槽,用以安装全向轮12。其中,全向轮12的数量可以为若干个,在本申请实施例中,可以设置四个全向轮12,且对称安装于车体1的底部。全向轮12配合运动以驱动车体1全向移动,即使车体1可以前进、后退,横向左移、横向右移、旋转等移动。
进一步的,全向轮12包括轮毂(未示出)和若干设置于轮毂周边的从动轮未示出),轮毂转动带动从动轮转动。从动轮的轴线与轮毂的轴线成夹角,该夹角可以为45°,但并不限于此。轮毂可以由电机(未示出)驱动而转动,以带动从动轮转动。需要解释说明的是,轮毂可以向前转动和向后转动。轮毂转动时,其外表面与从动轮的外表面接触部分存在摩擦,该接触部分的摩擦可带动从动轮转动,进而使得从动轮相对于地面滚动,从而实现全向轮12相对于地面移动。在本申请实施例中,可以通过分别控制各个全向轮12的轮毂的转速和转向来实现车体1不同方向的移动,从而能够实现车体1的全方位移动。
可以理解的是,基于车体1是自移动装置,则在车体1的内部还设置有用于控制全向轮12转动的控制器,该控制器可以包括单片机或其它微处理器。当然,在本申请其它实施例中,控制器可以安装于其它位置。其中,在本申请实施例中,控制器可以与驱动全向轮12的电机电连接,控制电机的转向和转速,从而控制轮毂的转向和转速,来实现对全向轮12的控制。例如,控制器可以接收运维人员通过控制装置6发送的控制指令,从而控制车体1按照控制指令移动到指定位置。
在本申请实施例中,车体1的侧板安装有操作面板37(如图5所示)。操作面板37可以包括按钮、人机界面、电源开关、摇杆和/或接口等。按钮例如控制全向轮12的急停按钮、启动按钮和/或停止按钮等。运维人员则可以通过人机界面设置车体1的移动线路,即控制器与操作面板37连接,可以接收人机界面输入的控制信号;当然,控制器也可以将反馈信号提供给人机界面,以反馈给运维人员等。
请继续参考图5和图6,图5是本申请实施例提供的又一种可移动悬臂吊100的结构示意图。图6是图5中A处放大的局部示意图。可以理解的是,为了使得车体1有充足的电能来维持车体1的运行,则在车体1上还设置有电能储备机构34,电能储备机构34包括超级电容(未示出)、充电收纳装置(未示出)以及供电装置(未示出),其中,充电收纳装置设置在车体1上,超级电容设置在充电收纳装置内,供电装置与超级电容连接,以为超级电容供电。在本申请实施例中,供电装置可包括有线缆,为了不使线缆影响车体1的作业,则充电收纳装置包括设置在车体1的侧板位置的电缆收纳结构341。
在本申请实施例中,车体1上还可以设置有预警装置35,以提醒相关人员避让。预警装置35包括预警显示装置或预警播放装置,预警显示装置可以为显示灯,预警播放装置可以为播放器。可以理解的是,在车体1上,除了设置有预警装置35外,还可以设置有探测障碍物的车体障碍物传感器(未示出),以使得车体1可以主动探测其周围的障碍物,以避免车体1与障碍物碰撞。车体障碍物传感器可以设置在车体1的前侧、后侧、左侧和/或右侧的任意一个或多个方向上。在本申请实施例中,车体障碍物传感器可以是激光传感器、超声波传感器,或者其它类型的传感器,只要是用于探测障碍物,均是本申请实施例所要保护的范围。
在本申请实施例中,为了在车体1与障碍物相撞时保护车体1,则在车体1底部的边缘位置,还设置有防撞装置36,该防撞装置36可以是防撞条。
在本申请实施例中,车体1还用于承载被吊件,对应的,在车体1上设置有能够承接悬臂装置3吊装的被吊件的承载平台11。其中,基于工作环境,被吊件可能存有液体,为了不影响车体1的长期运行,则在本申请实施例中,承载平台11包括积液支撑板111和液体收集箱112,积液支撑板111设置在车体1的顶部端面,且积液支撑板111设置为至少两层,即包括形成有若干漏液通孔的积液支撑盘和积液引流板,积液支撑盘设置在积液引流板的上方,液体收集箱112设置在车体1的内部,液体收集箱112底部开设有排液口,积液引流板的引流口和液体收集箱112通过导液管113连接。当然,为了便于积液引流板中的液体快速地流到液体收集箱112中,则可将积液引流板设置为具有倾斜度的积液引流板,即积液引流板的引流口位于积液引流板的最低位置。这样承载平台11既可以承载被吊件,还可以将被吊件上的液体收集,从而维护了车体1所在的工作环境。
需要补充说明的是,本申请实施例提供的方案,主要是为了使得悬臂装置3在高度方向上的高度可调整,所以本申请实施例在悬臂装置3上设置了升降装置8,以使得悬臂装置3在高度方向上的高度可调整。这是对于悬臂装置3结构的设置,为了进一步使得悬臂装置3在高度方向上的高度可调整,在本申请实施例的其它方案中,还可以对车体1的结构进行设置,即通过改变车体1的结构来实现悬臂装置3在高度方向上的高度可调整。
具体的,如图5和图6所示,图5所示的可移动悬臂吊100的大多结构与图1所示的可移动悬臂吊100一致,唯一不同点在于在车体1上还设置有支撑调整装置2,支撑调整装置2用于调整车体1的高度。其中,支撑调整装置2具体设置在车体1的边角位置,支撑调整装置2至少是三个,以实现在支撑车体1时的平衡。支撑调整装置2包括连接转轴21、连接座22、驱动机构(未示出)和支撑脚23。具体的,连接座22通过连接转轴21活动连接在车体1的边角,驱动机构设置在连接座22上,驱动机构包括驱动电机和气缸机构,驱动电机设置在靠近连接转轴21的连接座22的一端,驱动电机与连接转轴21连接。气缸机构设置在靠近支撑脚23的连接座22的一端,并与支撑脚23连接,通过驱动电机带动连接转轴21旋转,使得连接座22可从车体1上移出,而后再通过气缸机构带动支撑脚23的支撑腿的伸缩,可使支撑脚23的支撑腿伸长,从而使连接座22的位置升高,从而使得车体1整体的高度升高,进而实现对悬臂装置3在高度方向上的高度调整。反之,当车体1需要进入移动状态时,通过气缸机构带动支撑脚23的支撑腿的伸缩,可使支撑脚23的支撑腿缩短,从而使连接座22恢复至初始位置,再通过驱动电机带动连接转轴21旋转,使得连接座22移入车体1的容置空间中,进而减少了车体1的行使空间,也防止支撑调整装置2与障碍物碰撞。
可以理解的是,在实现调整可移动悬臂吊100的高度的方案中,升降装置8和支撑调整装置2是可以组合使用的,即可移动悬臂吊100既可以设置有支撑调整装置2,也可以设置有升降装置8。反之,升降装置8和支撑调整装置2也是可以单独设置的,即通过升降装置8调整悬臂装置3的高度,从而调整可移动悬臂吊100整体的高度;或通过支撑调整装置2调整车体1的高度,从而调整可移动悬臂吊100整体的高度。
本申请实施例提供一种可移动悬臂吊100,包括:车体1、悬臂装置3以及升降装置8;悬臂装置3安装在车体1上,能够随车体1移动;升降装置8安装在车体1上,并与悬臂装置3连接,以带动悬臂装置3在高度方向上的移动。本申请实施例通过车体1的全方位的移动,将设置在车体1上的悬臂装置3移动到指定区域,并通过升降装置8调整悬臂装置3的高度,从而使得悬臂装置3位于指定的高度位置上,再通过悬臂装置3将被吊件吊装到指定位置,进而使得可移动悬臂吊100能够适应不同吊装高度的工作场合,提升了可移动悬臂吊100的使用率,也降低了可移动悬臂吊100使用投入成本。
本申请实施例还提供一种用于吊装液冷设备的可移动悬臂吊,基于该用于吊装液冷设备的可移动悬臂吊与上述实施例可移动悬臂吊相同或相似,故采用与上述实施例相关结构相同的标记。具体的,用于吊装液冷设备的可移动悬臂吊,包括:车体1、悬臂装置3以及升降装置8;所述悬臂装置3安装在所述车体1,可以随所述车体1移动;所述悬臂装置3可以吊装所述液冷设备;所述升降装置8安装在所述车体1,并与所述悬臂装置3连接,以带动所述悬臂装置3在高度方向上的移动,从而带动所述悬臂装置3吊装的所述液冷设备在高度方向上的移动。
进一步的,车体1还用于承载吊装液冷设备,对应的,在车体1上设置有能够承接悬臂装置3吊装的吊装液冷设备的承载平台11。其中,基于工作环境,吊装液冷设备可能存有液体,为了不影响车体1的长期运行,则在本申请实施例中,承载平台11包括积液支撑板111和液体收集箱112,积液支撑板111设置在车体1的顶部端面,且积液支撑板111设置为至少两层,即包括形成有若干漏液通孔的积液支撑盘和积液引流板,积液支撑盘设置在积液引流板的上方,液体收集箱112设置在车体1的内部,液体收集箱112底部开设有排液口,积液引流板的引流口和液体收集箱112通过导液管113连接。当然,为了便于积液引流板中的液体快速地流到液体收集箱112中,则可将积液引流板设置为具有倾斜度的积液引流板,即积液引流板的引流口位于积液引流板的最低位置。这样承载平台11既可以承载吊装液冷设备,还可以将吊装液冷设备上的液体收集,从而维护了车体1所在的工作环境。其中,液冷设备上的液体即为冷却液。
以下将根据具体的应用场景对本申请实施例提供的用于吊装液冷设备的可移动悬臂吊进行解释说明。
应用场景
可移动悬臂吊100用于在数据中心中吊装液冷设备,具体可以是液冷服务器设备。具体的,需要将液冷设备吊装到A位置的液冷服务箱中。首先,运维人员通过手中的控制装置6控制车体1移动到提取液冷服务器设备的位置,并通过吊钩72将液冷服务器设备吊装到车体1上的承载平台11上。将液冷服务器设备承接到承载平台11上,不仅是为了使液冷服务器设备在吊装过程中运行的平稳,还可以将液冷服务器设备在被吊装的时候可能存在的液体,即冷却液,及时收集到承载平台11的液体收集箱112中,从而避免该冷却液在车体1的移动过程中洒落在行驶路径上。而后,控制车体1使其移动至靠近A位置的区域,此时,运维人员通过控制装置6控制升降装置8将液冷服务器设备从承载平台11上吊起,具体的,升降电机81转动,并通过动力传输机构82带动丝杠机构83的丝杠831转动,以使得螺母832带动可升降柱31上升到指定高度,在吊起的过程中,折臂臂吊支架52和根臂臂吊支架42均为制动状态,以保证液冷服务器设备的平衡吊起。当到达指定高度后,根臂制动装置43解除对根臂臂吊支架42的制动,以使得根臂臂吊支架42可以绕根臂转轴41转动第一预设角度,而后,根臂制动装置43将根臂转轴41和根臂臂吊支架42制动。最后,折臂制动装置53将折臂转轴51和折臂臂吊支架52松开,在折臂臂吊支架52绕折臂转轴51旋转第二预设角度后到达指定A位置,折臂制动装置53对折臂转轴51和折臂臂吊支架52进行制动。当然,在本场景的较优方案中,根臂臂吊支架42和折臂臂吊支架52可以同时转动,这样可以加快将液冷服务器设备移动到指定位置的速度,从而提升吊装的效率。在到达指定A位置后,运维人员通过控制装置6控制升降装置8将可升降柱31下降,从而将液冷服务器设备安装在指定A位置的液冷服务箱中。需要说明的是,升降装置8的升降控制还可以通过车体1上的操作面板37进行控制,也可以是其它控制方式进行控制,本场景对此不作限制。
本申请虽然以较佳实施例公开如上,但其并不是用来限定本申请,任何本领域技术人员在不脱离本申请的精神和范围内,都可以做出可能的变动和修改,因此本申请的保护范围应当以本申请权利要求所界定的范围为准。
- 一种悬臂吊及悬臂吊系统
- 一种停车装置悬臂吊及应用停车装置悬臂吊的停车装置