车轮转向装置
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及设置于车辆并将该车辆的车轮转向的车轮转向装置。
背景技术
在车辆的领域中,众所周知,定位根据从路面作用于车轮的力而变化,在该车轮是转向轮的情况下,该力对该车轮的转向角产生影响。考虑到该情况,例如,在下述专利文献所记载的车轮转向装置中,通过使主销内倾偏距为0那样的悬架几何结构实现而谋求了车轮转向装置的改进。
专利文献1:日本特开2007-326467号公报
发明内容
上述专利文献所记载的技术是车轮转向装置的改进的一个例子,通过不依赖于该技术的改进,也能够使车轮转向装置的实用性提高。本发明是鉴于那样的实际情况而完成的,其课题在于提供一种实用性较高的车轮转向装置。
本发明的车轮转向装置构成为具备:转向节,构成悬架装置的一部分,能够在上下方向上与车身相对动作,并将车轮保持为能够旋转;和转向致动器,为了将上述车轮转向,使上述转向节绕着主销轴线转动,后倾角与主销后倾偏距都为0。
根据本发明,实现即使因路面的起伏等而使车轮上下的力发挥作用,车轮的转向角(是与“滑移角”相同的概念)的变化也较少的车轮转向装置,换言之,实现使转向节绕着主销轴线转动的力的作用较小的车轮转向装置(以下,存在简称为“转向装置”的情况)。
在本发明的车轮转向装置(以下,存在称为“本车轮转向装置”或者“本转向装置”的情况)中,“后倾角”能够定义为在将主销轴线、和与车轮具有的轮胎的接地面的中心(以下,存在称为“接地面中心”的情况)垂直延伸的线(是与车轮轴线相交的线,以下,存在称为“垂直线”的情况)投影于与车轮的旋转轴线(以下,存在称为“车轮轴线”的情况)成直角的平面的情况下这些主销轴线与垂直线形成的角度,“主销后倾偏距”能够定义为在车轮轴线的延伸方向(以下,存在称为“车轮轴线方向”的情况)上观察的情况下的车轮轴线与主销轴线的水平距离。本转向装置中的“后倾角与主销后倾偏距都为0”是指它们实质上为0、换言之它们大致为0的情况。
在车轮和车身进行上下方向上的相对动作的情况下,即,在进行弹跳/回弹动作的情况下,预测到因定位的变化而后倾角与主销后倾偏距的至少一方变化。若考虑该情况,则优选在车身和车轮的上下方向上的相对位置、即行程位置至少为标准位置(既不进行弹跳动作也不进行回弹动作的设计上的位置)时,后倾角与主销后倾偏距都为0,更优选通过一定程度的弹跳/回弹动作,也将后倾角与主销后倾偏距都维持于0。具体而言,优选夹着标准位置在从全弹跳状态的位置的1/2到全回弹状态的位置的1/2的范围内将行程位置实质上维持于0。
例如,在为了使后倾角和主销后倾偏距都为0而采用了滑柱式的悬架装置的情况下,在车轮轴线方向上观察,用于将转向节与下臂连结的球窝接头的中心、和用于可转动地将减震器、悬架弹簧的上端支承于车身的上支撑件的转动中心都与上述垂直线重叠即可。
另外,在将转向节经由下臂支承于车身的情况下,优选该下臂相对于车身的转动轴线(以下,存在称为“臂转动轴线”的情况)呈水平(是包括“实质上的水平”在内的概念)的。若在那样的下臂支承转向节,则能够使后倾角和主销后倾偏距的变化相对于车身和车轮的上下方向上的相对位置的变化的依存性相当小。
本转向装置也能够构成为:转向致动器能够将车轮与其他的车轮独立地转向。简单地来说,也能够为使4轮车的情况下的左右的车轮分别单独地转向那样的转向装置(以下,存在称为“单轮独立转向装置”的情况)。
在本转向装置为单轮独立转向装置的情况下,优选使主销内倾偏距为0(是实质上包括0的概念)。“主销内倾偏距”能够定义为接地面中心与主销轴线的接地面的交点的车轮轴线方向上的距离。若将从外部作用于车轮或者转向节并使转向节绕着主销轴线转动的力称为“外部作用力”,则在对车辆赋予驱动力、制动力(以下,存在统称为“前后力”的情况)后,由该前后力引起的外部作用力作用于转向节。在通过转向杆等将左右的转向节连结的转向装置(以下,存在称为“两轮转向装置”的情况)的情况下,由前后力引起的外部作用力为相对于左右的转向节相互相反的方向的力,这些力抵消,而不会对左右的车轮的转向产生影响。然而,在单轮独立转向装置的情况下,没有将左右的转向节连结,因此由该前后力引起的外部作用力对车轮的转向产生影响。在采用所谓的轮毂马达式的车轮驱动装置的情况下,通过使主销内倾偏距为0,能够减小由驱动力造成的影响,在采用所谓的盘制动器等车轮制动装置的情况下,通过使主销内倾偏距为0,也能够减小由制动力造成的影响。在使主销内倾偏距为0的情况下,优选至少在行程位置为标准位置时变为0。
另外,在本转向装置为单轮独立转向装置的情况下,也可以将转向致动器配设于下臂。将转向致动器配设于下臂的单轮独立转向装置能够与悬架装置、制动装置、车轮驱动装置一起简便地构成车轮配设模块,因此谋求本转向装置向车身的搭载的容易化。
本转向装置也可以构成为:转向致动器具有电动马达作为驱动源。在该情况下,转向致动器可以是辅助对操作部件赋予的驾驶员的操作力的致动器,也可以是将用于将车轮转向的力(以下,存在称为“转向力”的情况)与该操作力无关地赋予给转向节的致动器。即,本转向装置可以是所谓的动力转向装置,也可以是所谓的线控转向式的装置。
在转向致动器具有电动马达作为驱动源的情况下,在构建线控转向式的转向装置的情况下,本转向装置也可以构成为,具备管理该转向装置的控制的控制器,该控制器基于车轮的转向角相对于目标转向角的偏差来控制向该电动马达的供给电流。而且,以基于驾驶员对操作部件的操作来决定其目标转向角的方式构成控制器即可。若将采用那样的结构的形态称为典型形态,则在该典型的形态中,例如,由于因上述外部作用力而车轮的转向角变动,因此向电动马达供给电流。极端地来说,当在车辆前进时因外部作用力而将车轮转向时,为了消除该转向而向电动马达供给电流。如之前说明的那样,对于本转向装置而言,即使上下方向的外部作用力作用于车轮,车轮的转向角的变动也不大,因此能够减小向电动马达的供给电流。换言之,根据典型形态,能够构建节能的转向装置。
在本转向装置中,使后倾角与主销后倾偏距都为0,因此自回正扭矩、即复原至未将车轮转向的状态的力较小。在构成为依据操作部件的操作力来将车轮转向的转向装置中,该情况也有可能导致对驾驶员的转向操作给予不协调感。然而,在将本转向装置构建为线控转向式的转向装置的情况下,设置对操作部件赋予操作反作用力的反作用力赋予装置,并适当地控制该操作反作用力,由此能够使转向操作的感觉适当。
附图说明
图1是表示构成为包括实施例的车轮转向装置的车辆用转向系统的示意图。
图2是表示构成为包括实施例的车轮转向装置的车轮配设模块的结构的立体图。
图3是用于对图2所示的车轮配设模块的悬架几何结构进行说明的示意图。
图4是表示通过外部作用力施加于转向节的力矩的算式。
图5是用于对车身和车轮的上下方向的相对动作中的定位变化进行说明的坐标图。
附图标记说明
10…车轮;12…车轮转向装置;14…操作装置;16…转向电子控制单元〔控制器〕;18…操作电子控制单元〔控制器〕;20…车轮配设模块;22…CAN;24…车轮驱动单元;24a…壳体〔转向节〕;26…下臂;28…减震器;30…悬架弹簧;36…臂连结用球窝接头;38…上支撑件;39…弹簧/减震器Assy;46…转向致动器;46a…转向马达〔电动马达〕〔驱动源〕;48…横拉杆;56…转向车轮〔转向操作部件〕;60…反作用力赋予装置;LL…臂转动轴线;KP…主销轴线;WL…车轮轴线;VL…垂直线;SC…接地面中心;φ
具体实施方式
以下,作为用于实施本发明的方式,边参照附图边对作为本发明的实施例的车轮转向装置详细地进行说明。此外,本发明除了下述实施例之外,以在上述〔发明的形态〕的项目中记载的方式为首,能够以基于本领域技术人员的知识实施了各种变更、改进的各种方式来实施。
[A]车辆用转向系统的结构
构成为包括实施例的车轮转向装置的车辆用转向系统(以下,存在简称为“转向系统”的情况)是所谓的线控转向式的转向系统,如图1示意性所示,构成为包括:一对车轮转向装置12,搭载于具有左右的前轮10FL、10FR和左右的后轮10RL、10RR的车辆,并将左右的前轮10FL、10FR分别转向;操作装置14,用于接受驾驶员的操作;一对转向电子控制单元(以下,存在简略记作“转向ECU”的情况)16,用于分别控制一对车轮转向装置12;以及操作电子控制单元(以下,存在简略记为“操作ECU”的情况)18,用于控制操作装置14并且统合转向ECU16。一对车轮转向装置12分别是实施例的车轮转向装置。此外,在无需区分左右的前轮10FL、10FR的情况下,有时将它们统称为前轮10F,在无需区分左右的后轮10RL、10RR的情况下,有时将它们统称为后轮10R,在无需区分前轮10F、后轮10R的情况下,有时仅统称为车轮10。
各车轮转向装置12装入于之后详细进行说明的车轮配设模块20内。一对转向ECU16和操作ECU18分别与CAN(car area network or controllable area network:汽车局域网或可控局域网)22连接,经由CAN22能够相互通信。在该转向系统中,可以认为由这一对转向ECU16、操作ECU18、CAN22构成分别控制一对车轮转向装置12的控制器。
如图2所示,车轮配设模块(以下,存在仅省略为“模块”的情况)20是用于将安装有轮胎10a的车轮10b配设于车身的模块。能够将车轮10b本身认为是车轮,但在本实施例中,为了方便,将安装有轮胎10a的车轮10b称为车轮10。
本模块20具有作为车轮旋转驱动装置的车轮驱动单元24。车轮驱动单元24具有壳体24a、作为内置于壳体24a的驱动源的电动马达亦即驱动马达和将该驱动马达的旋转减速的减速机(均省略图示)、以及供车轮10b安装的轮毂(在图中隐藏而看不到)。车轮驱动单元24配置于车轮10b的轮辋的内侧,被称为所谓的轮毂马达单元。车轮驱动单元24是广泛公知的构造,因此省略其构造的说明。
本模块20构成为包括麦弗逊式悬架装置(也称为“麦弗逊滑柱式”)。在该悬架装置中,车轮驱动单元24的壳体24a作为将车轮保持为能够旋转的载体,进一步来说,壳体24a作为之后进行说明的车轮转向装置12中的转向节发挥功能,被允许相对于车身的上下移动。即,壳体24a能够在上下方向上与车身相对动作。因此,悬架装置构成为包括作为悬架臂的下臂26、车轮驱动单元24的壳体24a、减震器28、以及悬架弹簧30。
悬架装置本身是一般的构造的装置,因此若简单地进行说明,则下臂26是被称为所谓的L臂的形状的臂,基端部在车辆前后方向上分为两个部分,在其基端部,能够经由第1衬套32、第2衬套34绕着水平的臂转动轴线LL转动,并支承于车身的纵梁(省略图示)。车轮驱动单元24的壳体24a在其下部并在下臂26的前端部经由作为第1接头的臂连结用球窝接头36(以下,存在称为“第1接头36”的情况)连结为能够转动。
减震器28的下端部固定地支承于车轮驱动单元24的壳体24a,上端部经由上支撑件38可旋转地支承于车身的轮胎壳体的上部。悬架弹簧30的上端部也经由上支撑件38可旋转地支承于车身的轮胎壳体的上部,悬架弹簧30的下端部由凸缘状地设置于减震器28的下支撑件28a支承。即,悬架弹簧30和减震器28在下臂26与车身之间作为弹簧/减震器Assy39相互并列地配设。
本模块20具有制动装置,该制动装置构成为包括:圆盘转子40,与车轮10b一起安装于轮毂并与车轮10一起旋转;和制动钳42,以跨过该圆盘转子40的方式保持于车轮驱动单元24的壳体24a。省略详细的说明,但该制动钳42具有:制动片,作为摩擦部件;和制动致动器,具有电动马达,并用于通过以该电动马达的力将制动片按压于圆盘转子40来阻止车轮10的旋转,该制动装置为依赖于所谓的电动马达产生的力来产生制动力的电动制动装置。
并且,本模块20具有上述的本实施例的车轮转向装置12。车轮转向装置12是用于仅将左右一对车轮10中的一方与另一方独立地转向的单轮独立转向装置,大体构成为包括:车轮驱动单元24的壳体24a(以下,在作为车轮转向装置12的结构要素处理的情况下,有时称为“转向节24a”。),如之前说明的那样作为转向节发挥功能;转向致动器46,在靠近下臂26的基端部的位置配设于下臂26;以及横拉杆48,将该转向致动器46与转向节24a连结。
转向致动器46构成为包括:转向马达46a,是作为驱动源的电动马达;减速机46b,将转向马达46a的旋转减速;以及致动器臂46c,通过经由减速机46b的转向马达46a的旋转而转动,并作为转向垂臂发挥功能。横拉杆48的基端部经由作为第2接头的杆基端部连结用球窝接头50(以下,有时称为“第2接头50”)与致动器臂46c连结,横拉杆48的前端部经由作为第3接头的杆前端部球窝接头52(以下,有时称为“第3接头52”)与转向节24a具有的转向节臂24b连结。
在本车轮转向装置12中,将上述上支撑件38的中心与第1接头36的中心连结的线为主销轴线KP。通过使转向马达46a动作,如在图中用粗箭头表示的那样,转向致动器46具有的致动器臂46c绕着致动器轴线AL转动。通过横拉杆48传递该转动,从而使转向节24a绕着主销轴线KP转动。即,如在图中用粗箭头表示的那样,将车轮10转向。根据这样的构造,在本车轮转向装置12中,包括致动器臂46c、横拉杆48、转向节臂24b等而具备将转向马达46a的旋转动作转换为车轮10的转向动作的动作转换机构54。
车轮转向装置12的转向致动器46配设于下臂26。因此,能够简便地进行模块20向车身的组装作业。直截了当地说,仅将下臂26的基端部安装于车身的纵梁并将上支撑件38安装于车身的轮胎壳体的上部,就能够将包括悬架装置、制动装置、车轮转向装置在内的该模块20搭载于车辆。即,本模块20为在相对于车辆的搭载性上优异的模块。
操作装置14具有线控转向式的转向系统中的一般的构造,若简单地进行说明,则如图1所示,构成为包括:转向车轮56,作为由驾驶员转向操作的转向操作部件;转向传感器58,用于检测作为该转向车轮56的旋转角的操作角作为转向操作部件的操作位置;以及反作用力赋予装置60,对转向车轮56赋予操作反作用力。反作用力赋予装置60构成为包括:反作用力马达62,是作为力源的电动马达;和减速机64,用于将反作用力马达62的力向转向车轮56传递。
[B]车辆用转向系统的控制
i)转向控制
简单地来说,该转向系统中的转向控制是使两个前轮10F分别转向为与转向要求相应的转向角ψ的控制。转向角ψ与所谓的转向位置同义,将在车辆的前进状态下应定位的位置亦即前进状态位置作为基准转向角,能够认为是与该基准转向角的相位位移量、即转向量。
若对转向控制详细地进行说明,则作为发挥作为统合的控制机构的作用的电子控制单元的操作ECU18具有构成为包括CPU、ROM、RAM等的计算机作为主要结构要素,取得基于转向传感器58的检测的转向车轮56的操作角、即转向操作位置σ(以下,存在简称为“操作位置σ”的情况)作为转向操作的程度,基于该操作位置σ,根据设定好的转向齿轮比,决定作为在各车轮10中应实现的转向角ψ的目标转向角ψ*。将作为用于使车辆前进的位置的前进状态位置作为基准操作位置,操作位置σ能够认为是与该基准操作位置的位置变化量、即转向操作量。此外,严格来说,转向操作位置σ、转向角ψ在夹着基准操作位置、基准转向角的左右为正负相反的值。
车轮转向装置12不具有用于直接检查车轮10的转向角ψ的转向角传感器。因此,在本转向系统中,利用在车轮10的转向角ψ与转向马达46a的动作位置之间存在特定的关系这一情况,操作ECU18和一对转向ECU16基于转向马达46a的动作位置来控制转向致动器46产生的转向力。转向致动器46产生的转向力与作为转向马达46a产生的扭矩的转舵扭矩Tqs处于特定的关系,详细而言,大体处于比例关系,因此具体而言,操作ECU18基于转向马达46a的动作位置来决定作为转向马达46a应产生的转舵扭矩Tqs的目标转舵扭矩Tqs*。
转向马达46a是旋转型的马达,因此转向马达46a的动作位置是马达轴的角度位置、即马达旋转角θ。马达的动作位置能够认为是马达的动作量、详细而言是与作为车辆前进时的马达的动作位置的基准动作位置的变化量,马达旋转角θ能够认为是从作为车辆前进时的基准动作位置的基准马达旋转角开始的位移角。马达旋转角θ超过360°而累积。进一步来说,在本车轮转向装置12中,将转向马达46a与转向节24a机械连结,在转向马达46a的马达旋转角θ的变化量与车轮的转向角ψ的变化量之间存在特定的关系。能够认为,大致在它们之间,基于依据减速机46b的减速比等的一定的比的关系成立。利用该关系,不直接地控制转向角ψ,而通过马达旋转角θ的控制来控制车轮10的转向角ψ。此外,严格来说,马达旋转角θ也在夹着基准马达旋转角的左右为正负相反的值。
若对目标转舵扭矩Tqs*的决定具体地进行说明,则操作ECU18对于各车轮10基于上述目标转向角ψ*来决定作为马达旋转角θ的目标亦即目标动作位置的目标马达旋转角θ*。另一方面,转向马达46a是无刷DC马达,为了向自身的电流供给中的相的切换而具有马达旋转角传感器(例如是霍尔Ic、解析器等)。各转向ECU16基于该马达旋转角传感器的检测来把握以基准马达旋转角为基准的作为当前时刻的马达旋转角θ的实时马达旋转角θ,将该实时马达旋转角θ的信息经由CAN22向操作ECU18发送。操作ECU18按照每个车轮10求出作为马达旋转角θ相对于目标马达旋转角θ*的偏差的马达旋转角偏差Δθ作为动作位置偏差,并基于该马达旋转角偏差Δθ(=θ*-θ),根据下式,决定目标转舵扭矩Tqs*。
Tqs*=G
此外,上述式子是基于马达旋转角偏差Δθ的遵循反馈控制律的式子,第1项、第2项、第3项分别是比例项、微分项、积分项,G
操作ECU18经由CAN22将目标转舵扭矩Tqs*的信息向各车轮10的转向ECU16发送,各转向ECU16基于该目标转舵扭矩Tqs*来控制转向马达46a。转舵扭矩Tqs与向转向马达46a的供给电流Is处于特定的关系。详细而言,转舵扭矩Tqs依赖于转向马达46a发挥的力,因此转舵扭矩Tqs与供给电流Is大体处于比例关系。根据该情况,各转向ECU16基于在操作ECU18中决定的目标转舵扭矩Tqs*来决定作为向转向马达46a的供给电流Is的目标的目标供给电流Is*,并将该目标供给电流Is*向转向马达46a供给。具体地来说,各转向ECU16具有执行目标供给电流Is*的决定等处理的计算机、和作为与该计算机连接的驱动电路的逆变器,基于由计算机决定的目标供给电流Is*,从逆变器向转向马达46a供给电流Is。
根据以上说明的转向控制,通过控制一对车轮转向装置12分别产生的转向力、即转舵扭矩Tqs,以左右的车轮10的各自的转向角ψ变为目标转向角ψ*的方式进行控制。此外,在上述的转向控制中,基于与转向角ψ相关的马达旋转角θ的偏差Δθ来决定目标转舵扭矩Tqs*,并基于该目标转舵扭矩Tqs*来决定向转向马达46a的目标供给电流Is*。简单地来说,该转向控制基于车轮10的转向角ψ相对于目标转向角ψ*的偏差Δψ来控制向转向马达46a的供给电流Is。
ii)操作反作用力控制
操作ECU18也执行用于对转向车轮56赋予作为相对于转向操作的反作用力的操作反作用力的控制、即操作反作用力控制。操作反作用力控制是一般的控制,能够通过各种方法来决定操作反作用力。在本转向系统中,操作ECU18根据模范性的手法、即下式将作为反作用力赋予装置60的反作用力马达62应产生的反作用力扭矩Tqc(是操作反作用力的一种)的目标反作用力扭矩Tqc*决定为目标操作反作用力。
Tqc*=Gσ·σ+Gv·v
Gσ、Gv分别是与转向操作位置σ、车速v有关的加权增益,简单地来说,设定为:转向操作位置σ越大,车速越高,则赋予越大的反作用力扭矩Tqc。另外,操作ECU18基于依据车轮驱动单元24的驱动马达的旋转速度的前轮10F的各自的车轮速v
操作ECU18基于如上述那样决定的目标反作用力扭矩Tqc*来决定作为向反作用力马达62的供给电流Ic的目标的目标供给电流Ic*,并基于该目标供给电流Ic*来向反作用力马达62供给电流Ic。此外,操作ECU18具有反作用力马达62的驱动电路(驱动器),经由该驱动电路向反作用力马达62供给电流Ic。
[C]依据悬架几何结构的外部作用力的影响及其排除
i)一般的悬架几何结构下的车轮转向装置
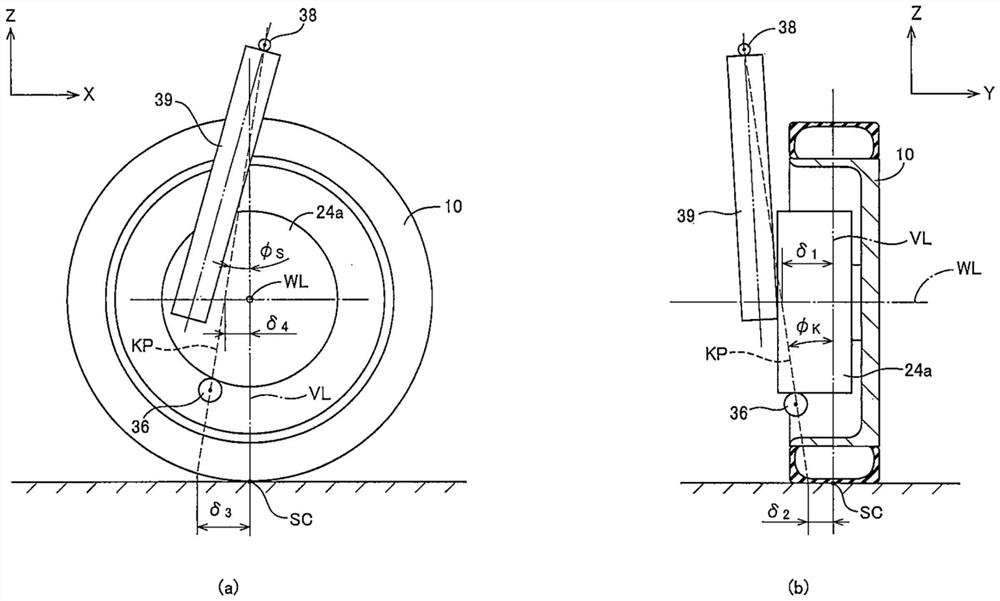
边参照作为示意图的图3,边对模块20构成为包括一般的滑柱式悬架装置的情况下的悬架几何结构进行说明。另外,将车轮10的旋转轴线定义为车轮轴线WL,将通过作为车轮10的接地面的中心的接地面中心SC并与该接地面成直角的线定义为垂直线VL。根据从作为车轮轴线WL的延伸的方向的车轮轴线方向观察的图3的(a)、和从前后方向观察的图3的(b)可知,垂直线VL与车轮轴线WL垂直相交,即车轮轴线WL与路面平行。此外,在以下的说明中,存在将作为车轮轴线WL的延伸的方向的车轮轴线方向称为Y方向、将上下方向称为Z方向、并将与车轮轴线方向成直角并且水平的方向称为X方向的情况(参照图2)。另外,在车轮10不转向的情况下,X方向与车辆的前后方向一致。
如之前说明的那样,将第1接头36的中心与上支撑件38的中心(弹簧/减震器Assy39向车身的支承的中心)连结的线为主销轴线KP。在将主销轴线KP和垂直线VL投影于与车轮轴线WL成直角的平面(以下,存在称为“XZ平面”的情况)情况下的、该XZ平面中的这些主销轴线KP与垂直线VL形成的角是后倾角φ
而且,如图3的(b)所示,YZ平面中的车轮轴线WL与垂直线VL的交点、与主销轴线KP的水平距离是主轴内倾偏距δ
车辆前后方向的力(前后力)F
例如,在因路面的起伏等而上下力F
在通过转向杆等将左右的转向节连结的两轮转向装置中,由前后力F
另一方面,在乘员数改变、装载的货物的重量变化的情况下,车身与车轮10的上下方向的相对位置、即行程位置变化。因该行程位置的变化而发生定位变化。即,后倾角φ
ii)实施例的车轮转向装置
考虑依据外部作用力的向转向马达46a的电流供给,在实施例的车轮转向装置12中,换言之在装入有实施例的车轮转向装置12的车轮配设模块20中,对悬架几何结构实施了研究。
边参照图3边详细地进行说明,在行程位置至少变为标准位置(既不进行弹跳动作也不进行回弹动作的设计上的位置)时,后倾角φ
根据图4的第3式,通过将主轴内倾偏距δ
根据后倾角φ
并且,在装入有实施例的车轮转向装置12的车轮配设模块20中,在行程位置至少为标准位置时,使得主销内倾偏距δ
边参照图5的坐标图边对相对于行程位置的变化的定位变化进行说明,相对于图5的(a)所示的一般的滑柱式悬架装置中的定位变化,在装入有实施例的车轮转向装置12的车轮配设模块20中,呈现图5的(b)所示的那样的定位变化。具体而言,夹着标准位置,在从全弹跳状态的位置的1/2到全回弹状态的位置的1/2的范围内,将后倾角φ
此外,臂转动轴线LL为水平(参照图2)也有助于将后倾角φ
根据带有以上说明的那样的悬架几何结构的实施例的车轮转向装置12,即使前后力F
- 转向装置及具备该转向装置的车辆用车轮配设模块
- 具有用于带有转向车轮驱动的机动车辆的单轮转向装置的车轮悬挂装置