一种基于应力解耦的可拉伸压力传感器及其制备方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及压力传感器技术领域,具体为一种基于应力解耦的可拉伸压力传感器及其制备方法。
背景技术
近年来,压力传感器作为柔性电子器件的一个重要组成部分已经引起了广泛的研究热情,在健康监测、可穿戴医疗、人机交互和机器人等多个领域具有重要的研究意义。
压电式柔性压力传感器是一种基于压电效应的传感器技术,主要利用压电材料的特性,通过材料在收到外力作用下的压缩或者形变产生电荷或电压的现象,从而实现对压力信号的感知和测量。
随着柔性材料技术的不断发展,如聚合物、橡胶、纳米材料等,柔性压力传感器得以实现在柔软、弯曲、可拉伸的基底上制备,使其能够适应不同形状和曲率的应用场景,并具有较好的力学性能。
其中,压电材料是压电式柔性压力传感器的关键部分,其性能对传感器的灵敏度、稳定性和可靠性等方面起着至关重要的作用。
随着压电聚合物、压电纳米复合材料等压电材料的不断发展,传感器的灵敏度和性能得到显著提升。在实际应用中,柔性压力传感器通常贴附在人体皮肤表面,而人体皮肤表面电子器件的应用环境十分恶劣,需要能够承受不同程度的拉伸、扭曲、摩擦等不同的物理干扰,这就导致了压力传感器的精度、稳定性、可靠性和动态响应等性能下降。因此,抗应力干扰的压力传感器的发展对于提高传感器的精度和可靠性,扩展传感器的应用范围,提供传感器的长期稳定性具有重要的研究意义。
目前针对增强柔性压力传感器的抗应变干扰能力的研究策略主要在于优化结构设计和信号处理算法等。柔性压力传感器的结构设计对其抗应变干扰能力也有一定的增强作用,目前,已有一些结构设计策略用于增强柔性压力传感器的抗应变干扰能力,如网状结构、多层结构等,但仍存在灵敏度性能下降或机械强度减小等问题。结构工程是一种有效的策略,通过对压力传感器的结构设计,使其具备较强的抗应变干扰能力。其中,采用蛇形结构、波浪结构和剪纸结构等设计,可以赋予不可拉伸材料特殊的机械性能。这种设计可以使材料结构在受到应力/应变时发生形变,从而吸收应力/应变,避免器件传感区域性能急剧衰退。然而,需要注意的是,应变工程策略虽然可以提高压力传感器的抗应变干扰能力,但也会限制器件的整体拉伸量。因此,在进行结构工程设计时,需要在器件的性能和抗应变能力之间进行权衡,以确保压力传感器在实际应用中既具备高精度的传感性能,又能够在应变环境下保持稳定的工作状态。因此,有必要设计一种抗应变干扰的可拉伸压力传感器及其制备方法来应对现有技术的不足,以解决或缓解上述问题。
基于此,我们提出了一种基于应力解耦的可拉伸压力传感器,希冀解决现有技术中的不足之处。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种基于应力解耦的可拉伸压力传感器及其制备方法。
(二)技术方案
为实现上述的目的,本发明提供如下技术方案:
一种基于应力解耦的可拉伸压力传感器,包括:由上到下依次为上封装层、上层金属电极、图形化PVDF压电薄膜、下层金属电极以及下封装层;
所述图形化PVDF压电薄膜上面与下面分别设置上层金属电极和下层金属电极,图形化PVDF压电薄膜通过图形化设计调控可拉伸性能和压电性能。
作为进一步的技术方案,所述上封装层和下封装层的杨氏模量为0.1-1MPa。
作为进一步的技术方案,所述图形化PVDF压电薄膜为蛇形网状,所述PVDF压电薄膜包括圆形压力传感区域、蛇形互联导线以及外接导线接口。
作为进一步的技术方案:根据蛇形网络的结构,每个蛇形单位单元包括两个相同的圆弧,其几何参数包括圆弧角,宽度和跨度。
作为进一步的技术方案:所述的蛇形互联导线的圆弧角θ包括130°、180°和230°,宽度和跨度的比值W/L为0.15,宽度为0.3mm。
作为进一步的技术方案,所述上层金属电极与下层金属电极均采用铜镍合金;
所述图形化PVDF压电薄膜厚度为110μm。
作为进一步的技术方案,所述上封装层与下封装层所采用的封装材料为聚二甲基硅氧烷;
上封装层与下封装层厚度相同,厚度范围为300μm-500μm。
一种基于应力解耦的可拉伸压力传感器的制备方法,包括:
(1)选取110μm厚度的PVDF薄膜,PVDF薄膜上面与下面分别镀有上层金属电极与下层金属电极,上层金属电极与下层金属电极的厚度为80-100nm;
(2)设计可拉伸图案,薄膜图形设计包括圆形压力传感区域、蛇形互联导线和外接电极接口,根据蛇形网络的结构,压力传感区域的直径设置为10mm,每个蛇形单位单元包括两个相同的圆弧,蛇形互联导线的圆弧角θ包括130°、180°和230°,宽度和跨度的比值W/L为0.15,宽度为0.3mm。
(3)将PVDF薄膜的顶面贴附一层水溶性胶带,并对底面进行激光扫描切割,激光功率为2W,扫描速度为700mm/s;
(4)称取10ml的聚二甲基硅氧烷前驱液作为B液,加入1ml聚二甲基硅氧烷固化剂作为A液,然后在室温下机械搅拌30min,搅拌速度为500rpm,B液和A液的质量比为10:0.5-1.5,置于室温中静置2h,去除气泡,得到PDMS预制液。
(5)在PVDF薄膜的底面旋涂一层步骤(4)中制备得到的PDMS预制液,随即放置于烘箱里,在55-65℃温度下固化处理2h。
(6)将水溶性胶带去除,并去除多余的部分即可得到具有可拉伸结构的PVDF薄膜;
(7)在PVDF薄膜顶面旋涂一层PDMS预制液进行封装,同上述步骤(5)中操作后,即得到可拉伸压力传感器。
(三)有益效果
与现有技术相比,本发明提供了一种基于应力解耦的可拉伸压力传感器,具备以下有益效果:
(1)利用蛇形结构设计实现了压力传感器的可拉伸性能;
(2)通过蛇形互联导线设计实现了对压电单元的单一信号感应,消除了拉伸应变对于压电单元组件的干扰;
(3)通过图案化设计的几个参数调节能够有效调节柔性压力传感器的可拉伸性和压电性能之间的平衡调整。
附图说明
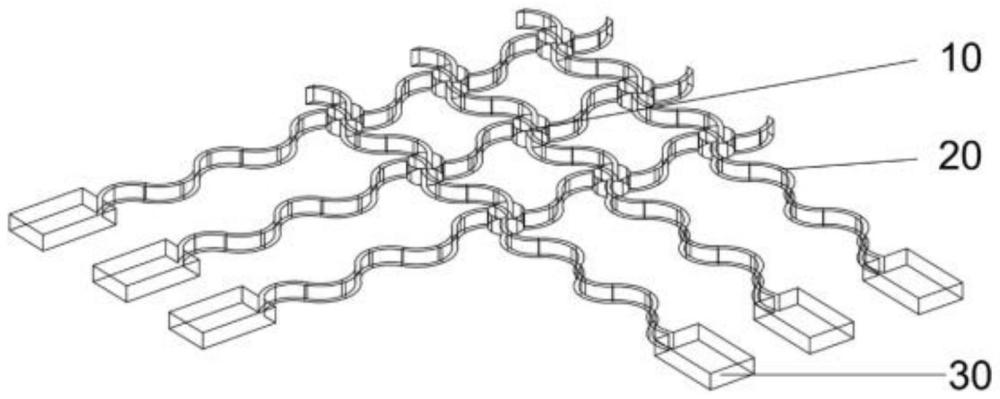
图1为本发明的可拉伸PVDF薄膜的立体示意图;
图2为本发明中的PVDF薄膜的截面示意图;
图3本发明中的可拉伸平面结构示意图;
图4为实施例中的器件示意图(拉伸前后)。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种基于应力解耦的可拉伸压力传感器,包括:由上到下依次为上封装层、上层金属电极、图形化PVDF压电薄膜、下层金属电极以及下封装层;
所述图形化PVDF压电薄膜上面与下面分别设置上层金属电极和下层金属电极,图形化PVDF压电薄膜通过图形化设计调控可拉伸性能和压电性能。
上封装层和下封装层的杨氏模量为0.1-1MPa。
所述图形化PVDF压电薄膜为蛇形网状,所述PVDF压电薄膜包括圆形压力传感区域(10)、蛇形互联导线(20)以及外接导线接口(30)。
根据蛇形网络的结构,每个蛇形单位单元包括两个相同的圆弧,其几何参数包括圆弧角(θ),宽度(W)和跨度(L)。
蛇形互联导线的圆弧角θ包括130°、180°和230°,宽度和跨度的比值W/L为0.15,宽度为0.3mm。
上层金属电极(11)与下层金属电极(11)均采用铜镍合金;
图形化PVDF压电薄膜(22)厚度为110μm。
上封装层与下封装层所采用的封装材料为聚二甲基硅氧烷;
上封装层与下封装层厚度相同,厚度范围为300μm-500μm。
一种基于应力解耦的可拉伸压力传感器的制备方法,包括:
(1)选取110μm厚度的PVDF薄膜,PVDF薄膜上面与下面分别镀有上层金属电极与下层金属电极,上层金属电极与下层金属电极的厚度为80-100nm;
(2)设计可拉伸图案,薄膜图形设计包括圆形压力传感区域、蛇形互联导线和外接电极接口,根据蛇形网络的结构,压力传感区域的直径设置为10mm,每个蛇形单位单元包括两个相同的圆弧,蛇形互联导线的圆弧角θ包括130°、180°和230°,宽度和跨度的比值W/L为0.15,宽度为0.3mm。
(3)将PVDF薄膜的顶面贴附一层水溶性胶带,并对底面进行激光扫描切割,激光功率为2W,扫描速度为700mm/s;
(4)称取10ml的聚二甲基硅氧烷(Polydimethylsiloxane,简称PDMS)前驱液作为B液,加入1ml聚二甲基硅氧烷固化剂作为A液,然后在室温下机械搅拌30min,搅拌速度为500rpm,B液和A液的质量比为10:0.5-1.5,置于室温中静置2h,去除气泡,得到PDMS预制液。
其中,聚二甲基硅氧烷固化剂为DBP。
(5)在PVDF薄膜的底面旋涂一层步骤(4)中制备得到的PDMS预制液,随即放置于烘箱里,在55-65℃温度下固化处理2h。
(6)将水溶性胶带去除,并去除多余的部分即可得到具有可拉伸结构的PVDF薄膜;
(7)在PVDF薄膜顶面旋涂一层PDMS预制液进行封装,同上述步骤(5)中操作后,即得到可拉伸压力传感器。
以下为具体实施例:
实施例1
一种基于应力解耦的可拉伸压力传感器的制备方法,包括以下步骤:
(1)选取110μm厚度的PVDF薄膜,薄膜表面镀有铜镍合金电极11,厚度为100nm;
(2)设计可拉伸图案,如图1所示,薄膜图形设计包括圆形压力传感区域10、蛇形互联导线20和外接电极接口30,根据蛇形网络的结构,压力传感区域的直径(D)设置为10mm,每个蛇形单位单元包括两个相同的圆弧,蛇形互联导线的圆弧角θ为130°,宽度和跨度的比值W/L为0.15,宽度为0.3mm。
(3)将PVDF薄膜的顶面贴附一层水溶性胶带,并对底面进行激光扫描切割,激光功率为2W,扫描速度为700mm/s;
(4)称取10ml的聚二甲基硅氧烷前驱液B液,加入1ml聚二甲基硅氧烷固化剂A液,室温下机械搅拌30min,搅拌速度为500rpm,聚二甲基硅氧烷PDMS的B液和A液的质量比为10:1.0,置于室温中静置2h去除气泡。
(5)在PVDF薄膜的B面旋涂一层步骤(4)中制备得到的PDMS预制液,随即放置于烘箱里以60℃固化处理2h。
上封装层与下封装层厚度400μm;上封装层和下封装层的杨氏模量为0.55MPa。
(6)将水溶性胶带去除,并去除多余的部分即可得到具有可拉伸结构的PVDF薄膜;
(7)在PVDF薄膜顶面旋涂一层PDMS预制液进行封装,同步骤(5)操作后即得到可拉伸压力传感器。
实施例二:
本实施例中的基于应力解耦的可拉伸压力传感器的制备方法在实施例1的基础上,区别仅在于,步骤(2)中的可拉伸图案设计中的角度θ值设置为180°,其余技术方案与实施例1相同。
实施例三:
本实施例中的基于应力解耦的可拉伸压力传感器的制备方法在实施例1的基础上,区别仅在于步骤(2)种的可拉伸图案设计种的角度θ值为230°,其余技术方案与实施例1相同。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。