免耕播种机前后同步转向主动对行及姿态调整装置
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于农业机械技术领域,涉及一种免耕播种机前后同步转向主动对行及姿态调整装置。
背景技术
免耕播种是华北麦玉轮作区实施保护性耕作的核心技术之一,主要是在不翻动地表土和有作物秸秆覆盖的情况下进行播种,能有效减少土壤风蚀、水蚀,改善土壤理化性质,增加土壤肥力。但是玉米收获后留根茬,根茬粗壮,且地表秸秆覆盖量大、韧性强。免耕播种机具在玉米留茬地行间播种小麦时,存在地形、秸秆分布、秸秆还田量等因素影响,入土开沟部件极易触碰玉米根茬,导致机具偏离行间播种路径,发生横向和航向角偏差,且易产生秸秆拥堵,使得机具通过性和燃油经济性大大降低,导致播种质量降低并影响后续农业生产工作。近年来,国内研究人员从农田实际的作业情况和农户购买特点出发,提出了对行免耕播种的新思路,即避开玉米根茬进行播种,但目前小麦对行播种时,多以操作员驾驶经验为主,长时间驾驶作业极易造成免耕播种作业效率和质量降低。
随着智能农业装备的快速发展,对田间作业效率的要求越来越高。虽然现有一种主动导航转向可调平免耕播种机通用悬挂装置(中国发明专利申请号:202010069695.4)挂接相应的免耕播种机具,可实现玉米根茬间小麦免少耕播种过程中时精准对行播种。该装置虽然较好地实现因地制宜地对秸秆进行对行防堵、避茬作业。但是免耕播种机的入土关键部件(如:开沟器等)在横移转向纠偏时仅依靠前端的通用悬挂装置拉拽,机具前后端受力不均匀,造成挂接的免耕播种机响应不及时,免耕播种机具易产生横移姿态调整时滞顿,极大地影响了播种质量和效率。
发明内容
针对上述技术问题,本发明的目的是提供一种利用卫星导航和路径规划技术的免耕播种机前后同步转向主动对行及其姿态调整装置,实现免耕播种机具对行播种,同时可以破茬、避茬、防堵和纠偏,使免少耕播种机具有独立横向移动能力,还可以解决免耕播种机具入土部件造成横移阻力过大以及单纯依靠农机具前部或者后部横移造成的播种质量下降问题,实现机具对行作业姿态调整时瞬时快速响应,提高机具作业质量,有效提高田间对行作业的快速性和可靠性。
为了实现上述目的,本发明提供了如下技术方案:
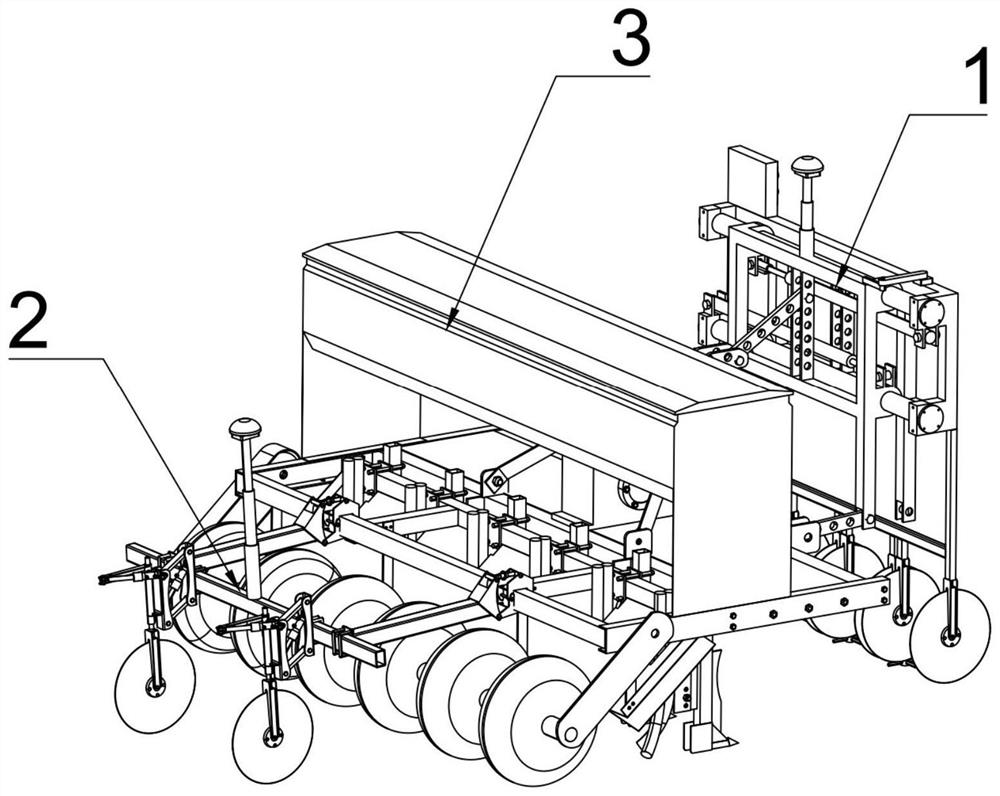
一种免耕播种机前后同步转向主动对行及姿态调整装置,包括安装在拖拉机4与免耕播种机3之间的横移装置1以及安装在免耕播种机3后端的仿形转向装置2。
所述横移装置1包括固定架1-1、横移架1-2、上横移光轴1-3、下横移光轴1-4、上横移液压缸1-5、下横移液压缸1-6、横移角度传感器1-7、横移导航装置1-8、控制系统1-9和重力切茬装置1-10。
所述固定架1-1包括水平并列设置的上固定架横梁1-1-1和下固定架横梁1-1-3,以及两个竖直并列与上固定架横梁1-1-1和下固定架横梁1-1-3垂直固接的固定架立柱1-1-4。
所述上横移光轴1-3的两端固接在上固定架横梁1-1-1的左右两端向后方凸出的固定耳上;所述下横移光轴1-4的两端固接在下固定架横梁1-1-3的左右两端向后方凸出的固定耳上。
所述横移架1-2包括水平并列设置的上横移架横梁1-2-1和下横移架横梁1-2-3,以及两个竖直并列与上横移架横梁1-2-1和下横移架横梁1-2-3垂直固接的横移架立柱1-2-4。
所述上横移架横梁1-2-1和下横移架横梁1-2-3的左右两端均设置有向前方凸出的滑动耳,上横移架横梁1-2-1和下横移架横梁1-2-3分别通过所述滑动耳可自由滑动地设置在上横移光轴1-3和下横移光轴1-4上。
水平设置的上横移液压缸1-5的两端分别通过销钉连接在固定架1-1的上固定架横梁1-1-1一侧的固定耳和横移架1-2的上横移架横梁1-2-1一侧的滑动耳上;水平设置的下横移液压缸1-6的两端分别通过销钉连接在固定架1-1的下固定架横梁1-1-3一侧的固定耳和横移架1-2的下横移架横梁1-2-3一侧的滑动耳上。
所述横移角度传感器1-7的两端通过销轴分别安装于所述固定架1-1的上固定架横梁1-1-1和横移架1-2的上横移架横梁1-2-1的上端面,实时感知所述固定架1-1与横移架1-2之间的角度关系。
所述横移导航装置1-8固接在横移架1-2的上横移架横梁1-2-1的上端面上,能够实时感知后面悬挂的所述免耕播种机3的位置信息。
所述控制系统1-9安装在固定架1-1上,接收横移角度传感器1-7和横移导航装置1-8采集的信息以及控制上横移液压缸1-5和下横移液压缸1-6工作。
所述重力切茬装置1-10包括固接在固定架1-1底端的切茬装置架体1-10-1和多个安装在切茬装置架体1-10-1上的圆盘破茬刀1-10-2。
所述仿形转向装置2包括颚式固定架2-1、水平支撑杆2-2、水平横梁2-3、圆盘偏转仿形移动装置2-4和转向导航装置2-5。
两个并列且与前进方向平行的水平支撑杆2-2的后端固接在水平横梁2-3的左右两端;两个水平支撑杆2-2的前端均固接一颚式固定架2-1,用于与免耕播种机3的后端固接;所述圆盘偏转仿形移动装置2-4为两个,分别位置可调地固接在水平横梁2-3的左右两端;所述左右两个圆盘偏转仿形移动装置2-4分别位于两行玉米根茬行的中间位置;所述转向导航装置2-5固接在水平横梁2-3的中部。
所述圆盘偏转仿形移动装置2-4包括四杆仿形装置2-4-1和转向装置2-4-6。
所述四杆仿形装置2-4-1包括仿形液压缸2-4-1-5、固定杆2-4-1-1、上连杆2-4-1-2、仿形杆2-4-1-3和下连杆2-4-1-4;其中,固定杆2-4-1-1和仿形杆2-4-1-3相互平行,上连杆2-4-1-2和下连杆2-4-1-4相互平行,固定杆2-4-1-1、上连杆2-4-1-2、仿形杆2-4-1-3和下连杆2-4-1-4依次铰接;所述仿形液压缸2-4-1-5的两端分别铰接在固定杆2-4-1-1和仿形杆2-4-1-3上;所述固定杆2-4-1-1固接在水平横梁2-3上。
所述转向装置2-4-6包括转向液压缸固定架2-4-2、转轴套筒2-4-3、圆盘转向轮2-4-4、转向液压缸2-4-5、转向角度传感器2-4-7、水平转动杆2-4-6-1和转向轴2-4-6-2。
平行于前进方向的水平转动杆2-4-6-1的前端通过键槽及轴肩固接在竖直设置的转向轴2-4-6-2的上端,转向轴2-4-6-2的下端与圆盘转向轮2-4-4的安装架固接;所述转轴套筒2-4-3可自由转动地套设在转向轴2-4-6-2上,位于水平转动杆2-4-6-1与圆盘转向轮2-4-4的安装架之间;所述转向液压缸固定架2-4-2的首端固接在转轴套筒2-4-3上部,且转向液压缸固定架2-4-2与水平转动杆2-4-6-1相互垂直;所述转向液压缸2-4-5的两端分别铰接在转向液压缸固定架2-4-2的末端和水平转动杆2-4-6-1的后端;所述转轴套筒2-4-3通过连接板固接在四杆仿形装置2-4-1的仿形杆2-4-1-3上;平行于前进方向的转向角度传感器2-4-7的一端固接在转向液压缸固定架2-4-2上,另一端固接在转向液压缸2-4-5上,用于检测圆盘转向轮2-4-4是否转到规定的转向角。
所述上固定架横梁1-1-1与下固定架横梁1-1-3之间的中部,以及两个固定架立柱1-1-4的底端设置有与拖拉机4的三点悬挂装置相对应的拖拉机悬挂耳1-1-2。
所述上固定架横梁1-1-1与下固定架横梁1-1-3之间的中部的拖拉机悬挂耳1-1-2上设有多个沿竖直方向等间距布置的悬挂孔。
所述上横移架横梁1-2-1与下横移架横梁1-2-3之间的中部,以及两个横移架立柱1-2-4的底端设置有与免耕播种机3的三点悬挂装置相对应的农机具悬挂耳1-2-2。
所述上横移架横梁1-2-1与下横移架横梁1-2-3之间的中部的农机具悬挂耳1-2-2上设有多个沿竖直方向等间距布置的悬挂孔。
所述颚式固定架2-1包括上颚卡固件2-1-1、下颚卡固件2-1-2、调平装置2-1-3和端部连接件2-1-4;所述上颚卡固件2-1-1的后端与下颚卡固件2-1-2的中部通过一水平销钉相互铰接,且上颚卡固件2-1-1与下颚卡固件2-1-2之间具有容纳免耕播种机3的后端连接部的空间;所述调平装置2-1-3的前端和后端分别与上颚卡固件2-1-1的顶端和端部连接件2-1-4的前端上部铰接;所述下颚卡固件2-1-2通过水平销钉与端部连接件2-1-4的前端下部铰接;所述端部连接件2-1-4的后端与水平支撑杆2-2的前端固接;通过调整调平装置2-1-3的长度调整颚式固定架2-1与免耕播种机3的后端连接部的连接位置,使得水平支撑杆2-2保持水平状态。
所述调平装置2-1-3包括前“T”形螺栓2-1-3-1、后“T”形螺栓2-1-3-2和调平螺母2-1-3-3;所述调平螺母2-1-3-3通过螺纹连接将前“T”形螺栓2-1-3-1和后“T”形螺栓2-1-3-2相互组合,构成“工”字形,通过转动调平螺母2-1-3-3调整调平装置2-1-3的长度。
所述横移导航装置1-8和转向导航装置2-5为可伸缩式结构。
所述免耕播种机3设有惯性导航系统,提供免耕播种机位置、速度、姿态信息。
所述横移装置1能够实现纠正偏转距离范围为-30cm~+30cm的调整;仿形转向装置2能够实现上下-20cm~+20cm的仿形高度,同时能够实现左右-90°~+90°的角度偏转,从而实现挂接免耕播种机3的横向偏差及姿态的调整。
与现有技术相比,本发明的有益效果在于:
1、本发明针对免耕播种机的开沟播种器需要入土,横移阻力大,通过前端横移三点悬挂装置和后端水平横移导向装置实现免少耕播种机具快速同步横向移动,可以实现横移距离L在-30cm~+30cm范围内平移,对拖拉机工作过程中偏移导致机具横向位置偏差进行补偿,使其按照路径规划行间播种,有效避免土壤关键部件触及玉米残茬,解决了开沟器工作过程中难以在土壤中快速稳定横移的难题。
2、本发明通过免耕播种机后端挂接的水平横移导向装置,对前端横移三点悬挂装置实现免耕播种机作业过程中瞬时横移阻力过大导致的横向和航向角偏差进行补偿,解决了免少耕播种机具仅依靠前端横移三点悬挂装置作用横移时响应滞钝的问题。
3、本发明采用双GPS定位系统和双横移转角传感装置,分别布置在横移三点悬挂装置和水平横移导向装置上,通过前后端GPS定位系统精确定位,在对前后端位置对比得出机具的姿态调整方式,通过横移转角传感装置反馈并及时快速地修正免耕播种机具行间姿态,可保证免耕播种的播种质量和效率。
4、本发明通过安装在横移三点悬挂装置上的破茬轮,通过破茬轮对秸秆残茬进行切断破碎处理,有效降低后续开沟器工作时秸秆缠绕拥堵现象。利用机具本身重量,通过圆盘破茬刀机型破茬,大大地减少了土壤扰动以及机具油耗,同时破茬后进行播种可一定程度上提高播种质量。通过安装在水平横移导向装置上的仿形机构,面对田间秸秆量较大和土壤硬物的情况下,有效避免了水平横移导向装置入土作业转向时造成残茬堆积和硬物刚性接触造成设备损坏。
5、本发明可以与导航系统配合。在找到玉米根茬行的前提下通过发送指令控制该小麦对行免耕播种机自适应避茬开沟装置完成避茬开沟作业,且左右横移旋转装置可以单独控制,即左横移旋转装置向左横移和开沟器单体逆时针旋转(或左横移旋转装置向右横移和开沟器单体顺时针旋转)时,右横移旋转装置也可进行向左横移和开沟器单体逆时针旋转(或右横移旋转装置向右横移和开沟器单体顺时针旋转)的动作。
6、本发明在不改变目前国内免耕播种机整机结构的情况下,对各种型号的免耕播种机乃至可悬挂的农机具有很好的通用性,有效解决了目前华北一年两熟区小麦对行免耕作业严重依赖驾驶员驾驶经验的问题,提高了小麦对行免耕作业防堵性能的同时,保证了良好的播种效果和提高作业效率。
附图说明
图1是本发明的免耕播种机前后同步转向主动对行及姿态调整装置安装位置的示意图;
图2是本发明的调整装置与免耕播种机3配合的结构示意图;
图3是本发明的横移装置1的结构示意图;
图4是本发明的横移装置1的固定架1-1的结构示意图;
图5是本发明的横移装置1的横移架1-2的结构示意图;
图6是本发明的重力切茬装置1-10的结构示意图;
图7是本发明的仿形转向装置2的结构示意图;
图8是本发明的颚式固定架2-1的结构示意图;
图9是本发明的调平装置2-1-3的结构示意图;
图10是本发明的圆盘偏转仿形移动装置2-4的立体结构示意图;
图11是本发明的圆盘偏转仿形移动装置2-4的侧视结构示意图;
图12是本发明的四杆仿形装置2-4-1的结构示意图;
图13是本发明的转向装置2-4-6的水平转动杆2-4-6-1和转向轴2-4-6-2的结构示意图;
图14是本发明的免耕播种机向左偏移、圆盘转向轮向右偏转补偿的结构示意图;
图15是本发明的免耕播种机横向偏差补偿后的结构示意图。
其中的附图标记为:
1横移装置 1-1固定架
1-1-1上固定架横梁 1-1-2拖拉机悬挂耳
1-1-3下固定架横梁 1-1-4固定架立柱
1-2横移架 1-2-1上横移架横梁
1-2-2农机具悬挂耳 1-2-3下横移架横梁
1-2-4横移架立柱 1-3上横移光轴
1-4下横移光轴 1-5上横移液压缸
1-6下横移液压缸 1-7横移角度传感器
1-8横移导航装置 1-9控制系统
1-10重力切茬装置 1-10-1切茬装置架体
1-10-2圆盘破茬刀 2仿形转向装置
2-1颚式固定架 2-1-1上颚卡固件
2-1-2下颚卡固件 2-1-3调平装置
2-1-4端部连接件 2-1-3-1前“T”形螺栓
2-1-3-2后“T”形螺栓 2-1-3-3调平螺母
2-2水平支撑杆 2-3水平横梁
2-4圆盘偏转仿形移动装置 2-4-1四杆仿形装置
2-4-1-1固定杆 2-4-1-2上连杆
2-4-1-3仿形杆 2-4-1-4下连杆
2-4-1-5仿形液压缸 2-4-2转向液压缸固定架
2-4-3转轴套筒 2-4-4圆盘转向轮
2-4-5转向液压缸 2-4-6转向装置
2-4-6-1水平转动杆 2-4-6-2转向轴
2-4-7转向角度传感器 2-5转向导航装置
3免耕播种机 4拖拉机
L横向误差
具体实施方式
下面结合附图对本发明做进一步详细的说明。
如图1和图2所示,一种免耕播种机前后同步转向主动对行及姿态调整装置,包括安装在拖拉机4与免耕播种机3之间的横移装置1以及安装在免耕播种机3后端的仿形转向装置2。
如图3所示,所述横移装置1包括固定架1-1、横移架1-2、上横移光轴1-3、下横移光轴1-4、上横移液压缸1-5、下横移液压缸1-6、横移角度传感器1-7、横移导航装置1-8、控制系统1-9和重力切茬装置1-10。
如图4所示,所述固定架1-1包括水平并列设置的上固定架横梁1-1-1和下固定架横梁1-1-3,以及两个竖直并列与上固定架横梁1-1-1和下固定架横梁1-1-3垂直固接的固定架立柱1-1-4。
所述上横移光轴1-3的两端固接在上固定架横梁1-1-1的左右两端向后方凸出的固定耳上;所述下横移光轴1-4的两端固接在下固定架横梁1-1-3的左右两端向后方凸出的固定耳上。所述上固定架横梁1-1-1与下固定架横梁1-1-3之间的中部,以及两个固定架立柱1-1-4的底端设置有与拖拉机4的三点悬挂装置相对应的拖拉机悬挂耳1-1-2。
所述上固定架横梁1-1-1与下固定架横梁1-1-3之间的中部的拖拉机悬挂耳1-1-2上设有多个沿竖直方向等间距布置的悬挂孔,便于调整拖拉机4的三点悬挂装置的上悬挂点的高度位置,可增加挂接拖拉机的通用性。
如图5所示,所述横移架1-2包括水平并列设置的上横移架横梁1-2-1和下横移架横梁1-2-3,以及两个竖直并列与上横移架横梁1-2-1和下横移架横梁1-2-3垂直固接的横移架立柱1-2-4。
所述上横移架横梁1-2-1和下横移架横梁1-2-3的左右两端均设置有向前方凸出的滑动耳,上横移架横梁1-2-1和下横移架横梁1-2-3分别通过所述滑动耳可自由滑动地设置在上横移光轴1-3和下横移光轴1-4上。
所述上横移架横梁1-2-1与下横移架横梁1-2-3之间的中部,以及两个横移架立柱1-2-4的底端设置有与免耕播种机3的三点悬挂装置相对应的农机具悬挂耳1-2-2。
所述上横移架横梁1-2-1与下横移架横梁1-2-3之间的中部的农机具悬挂耳1-2-2上设有多个沿竖直方向等间距布置的悬挂孔,便于调整免耕播种机3的三点悬挂装置的上悬挂点的高度位置,可增加挂接所述免耕播种机3的通用性。
水平设置的上横移液压缸1-5的两端分别通过销钉连接在固定架1-1的上固定架横梁1-1-1一侧的固定耳和横移架1-2的上横移架横梁1-2-1一侧的滑动耳上;水平设置的下横移液压缸1-6的两端分别通过销钉连接在固定架1-1的下固定架横梁1-1-3一侧的固定耳和横移架1-2的下横移架横梁1-2-3一侧的滑动耳上,实现所述横移架1-2左右移动。
所述横移角度传感器1-7的两端通过销轴分别安装于所述固定架1-1的上固定架横梁1-1-1和横移架1-2的上横移架横梁1-2-1的上端面,可以实时感知所述固定架1-1与横移架1-2之间的角度关系。
所述横移导航装置1-8固接在横移架1-2的上横移架横梁1-2-1的上端面上,能够实时感知后面悬挂的所述免耕播种机3的位置信息。
所述控制系统1-9安装在固定架1-1上,接收横移角度传感器1-7和横移导航装置1-8采集的信息以及控制上横移液压缸1-5和下横移液压缸1-6工作。
如图6所示,所述重力切茬装置1-10包括通过螺栓固接在固定架1-1底端的切茬装置架体1-10-1和多个安装在切茬装置架体1-10-1上的圆盘破茬刀1-10-2,用于切断玉米根茬行的两侧须根,为后面所述免耕播种机的行间播种提供更大的行空间。
如图7所示,所述仿形转向装置2包括颚式固定架2-1、水平支撑杆2-2、水平横梁2-3、圆盘偏转仿形移动装置2-4和转向导航装置2-5。
两个并列且与前进方向平行的水平支撑杆2-2的后端通过“U”形螺栓固接在水平横梁2-3的左右两端;两个水平支撑杆2-2的前端均固接一颚式固定架2-1,用于与免耕播种机3的后端固接。所述圆盘偏转仿形移动装置2-4为两个,分别通过“U”形螺栓位置可调地固接在水平横梁2-3的左右两端。所述左右两个圆盘偏转仿形移动装置2-4分别位于两行玉米根茬行的中间位置,便于转向时有较大的转向空间;所述转向导航装置2-5固接在水平横梁2-3的中部。
如图8所示,所述颚式固定架2-1包括上颚卡固件2-1-1、下颚卡固件2-1-2、调平装置2-1-3和端部连接件2-1-4。所述上颚卡固件2-1-1的后端与下颚卡固件2-1-2的中部通过一水平销钉相互铰接,且上颚卡固件2-1-1与下颚卡固件2-1-2之间具有容纳免耕播种机3的后端连接部的空间;所述调平装置2-1-3的前端和后端分别与上颚卡固件2-1-1的顶端和端部连接件2-1-4的前端上部铰接;所述下颚卡固件2-1-2通过水平销钉与端部连接件2-1-4的前端下部铰接;所述端部连接件2-1-4的后端与水平支撑杆2-2的前端固接。通过调整调平装置2-1-3的长度调整颚式固定架2-1与免耕播种机3的后端连接部的连接位置,使得水平支撑杆2-2保持水平状态。
如图9所示,所述调平装置2-1-3包括前“T”形螺栓2-1-3-1、后“T”形螺栓2-1-3-2和调平螺母2-1-3-3。所述调平螺母2-1-3-3通过螺纹连接将前“T”形螺栓2-1-3-1和后“T”形螺栓2-1-3-2相互组合,构成“工”字形,通过转动调平螺母2-1-3-3调整调平装置2-1-3的长度。
如图10和图11所示,所述圆盘偏转仿形移动装置2-4包括四杆仿形装置2-4-1和转向装置2-4-6。
如图12所示,所述四杆仿形装置2-4-1包括仿形液压缸2-4-1-5、固定杆2-4-1-1、上连杆2-4-1-2、仿形杆2-4-1-3和下连杆2-4-1-4。其中,固定杆2-4-1-1和仿形杆2-4-1-3相互平行,上连杆2-4-1-2和下连杆2-4-1-4相互平行,固定杆2-4-1-1、上连杆2-4-1-2、仿形杆2-4-1-3和下连杆2-4-1-4依次铰接。所述仿形液压缸2-4-1-5的两端分别铰接在固定杆2-4-1-1和仿形杆2-4-1-3上。所述固定杆2-4-1-1通过“U”形螺栓固接在水平横梁2-3上。所述仿形液压缸2-4-1-5伸缩带动所述仿形杆2-4-1-3上下移动,从而实现所述的机具根据地形变化进行仿形。
如图10、图11和图13所示,所述转向装置2-4-6包括转向液压缸固定架2-4-2、转轴套筒2-4-3、圆盘转向轮2-4-4、转向液压缸2-4-5、转向角度传感器2-4-7、水平转动杆2-4-6-1和转向轴2-4-6-2。
平行于前进方向的水平转动杆2-4-6-1的前端通过键槽及轴肩固接在竖直设置的转向轴2-4-6-2的上端,转向轴2-4-6-2的下端与圆盘转向轮2-4-4的安装架固接。所述转轴套筒2-4-3可自由转动地套设在转向轴2-4-6-2上,位于水平转动杆2-4-6-1与圆盘转向轮2-4-4的安装架之间。所述转向液压缸固定架2-4-2的首端固接在转轴套筒2-4-3上部,且转向液压缸固定架2-4-2与水平转动杆2-4-6-1相互垂直;所述转向液压缸2-4-5的两端分别铰接在转向液压缸固定架2-4-2的末端和水平转动杆2-4-6-1的后端。所述转轴套筒2-4-3通过连接板固接在四杆仿形装置2-4-1的仿形杆2-4-1-3上。平行于前进方向的转向角度传感器2-4-7的一端固接在转向液压缸固定架2-4-2上,另一端固接在转向液压缸2-4-5上,用于检测圆盘转向轮2-4-4是否转到规定的转向角。
本装置的横移装置1可以实现纠正偏转距离范围为-30cm~+30cm的调整;仿形转向装置2可以实现上下-20cm~+20cm的仿形高度,同时可以实现左右-90°~+90°的角度偏转,从而可以实现挂接免耕播种机3的横向偏差及姿态的调整。
所述横移导航装置1-8和转向导航装置2-5为可伸缩式结构,以适应不同的拖拉机类型,避免拖拉机高度不一致,可能阻挡接收卫星信号(一般情况下卫星信号接收器的高度要高于拖拉机的高度,防止拖拉机阻挡卫星信号接收器接收卫星差分信号)。
所述免耕播种机3设有惯性导航系统,提供免耕播种机位置、速度、姿态(航向角、俯仰角、横滚角)等信息。
本发明的工作过程如下:
如图14和图15所示,拖拉机4在前茬种植玉米,在导航模式种植的情况下,可以实现种植路径的记忆功能,本次播种是在前茬作物记忆的轨迹线进行适当的偏移,使免耕播种机3在玉米根茬行间进行路径跟踪作业。
由于根茬行内秸秆覆盖、地表变化容易引起拖拉机路径跟踪横向偏差。当拖拉机向左侧或右侧偏转横向误差L时,横移导航装置1-8、转向导航装置2-5可以定位出向左或向右横向偏移距离为横向误差L。此时,控制系统1-9启动上横移液压缸1-5或下横移液压缸1-6伸出带动横移架1-2沿着上横移光轴1-3、下横移光轴1-4向左或向右移动,通过农机具悬挂耳1-2-2使免耕播种机3向右或向左横移,根据横移角度传感器1-7的角度变化,判断横移距离是否等于横向误差L,如横移距离等于横向误差L,则通过控制系统1-9控制上横移液压缸1-5或横移液压缸1-6停止伸出,完成免耕播种机3前端的横向误差L的横移。
在免耕播种机3前端横移的同时,控制系统1-9控制左右两个圆盘偏转仿形移动装置2-4中的仿形液压缸2-4-1-5伸出,使转向装置2-4-6向右前方或向左前方转动,同时带动转向轴2-4-6-2和圆盘转向轮2-4-4转动,使免耕播种机3有向右前方或向左前方移动的趋势,通过转向角度传感器2-4-7的角度变化,判断横移距离是否等于横向误差L,如横移距离等于横向误差L,则通过控制系统1-9控制仿形液压缸2-4-1-5停止伸出,完成免耕播种机3后端的横向误差L的横移。
通过免耕播种机的惯性导航系统可以感知免耕播种机在实际工作时的地形变化。当地形左侧高右侧低时,控制系统1-9控制四杆仿形装置2-4-1中的仿形液压缸2-4-1-5伸出,带动仿形杆2-4-1-3向上移动,从而带动免耕播种机3左侧和/或右侧向上移动,保证播种深度一致性,直至惯性导航系统的翻滚角恢复到0°,停止仿形液压缸2-4-1-5伸出,完成免耕播种机3姿态调平。
上述实施例仅为本发明较佳的实施例,并非是对本发明实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无需也无法对所有的实施方式予以穷举,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进,均应包含在本发明的权利要求保护范围。