平衡装置和可移动机器人
文献发布时间:2023-06-19 09:24:30
技术领域
本申请涉及机械设备领域,特别涉及一种平衡装置和可移动机器人。
背景技术
为了适应使用环境的地形,可移动设备大多搭载有平衡装置,以调整载荷的倾角,改变重心的位置,以增加稳定性,防止倾覆,或用于提高用户体验,使得该可移动设备在工作时平稳移动。但是,目前的平衡装置主要为平移式或倾斜式,角度调整范围小,重心调整范围小,占用空间较多,无法满足日渐复杂的使用环境。
发明内容
本申请实施方式提供了一种平衡装置和可移动机器人,可以调整载荷的倾角,以调整重心。
本申请实施方式提供了一种平衡装置,包括:车身支架,所述车身支架用于支撑车身;其中,所述车身支架的上端固定连接于所述车身下端面;一对滑轨和往复机构,其中,所述往复机构用于提供与所述滑轨配合的滑块往复动力;转动连接轴,所述转动连接轴为所述车身支架与对应所述滑块之间的转动连接件;所述转动连接轴的一端垂直连接于所述滑块,所述转动连接轴连接于所述车身支架的第一位置,所述转动连接轴的轴心线与所述车身支架运动轨迹平面垂直;滑动轴,所述滑动轴垂直连接于所述车身支架的第二位置,且与所述转动连接轴平行;一对对称布置的滑轨支架,所述滑轨支架用于支撑所述滑轨,所述滑轨支架架体布置有滑动槽;所述滑动轴的两端分别与所述滑动槽匹配。
在一个实施方式中,所述滑动槽为U型槽。
在一个实施方式中,车身支架为两个,两个车身支架以所述车身对称布置。
在一个实施方式中,所述往复机构包括:驱动舵机,驱动轴,两个舵轮,两条链条;所述驱动舵机用于提供驱动轴旋转动力;所述驱动轴用于带动配合的两个驱动轮旋转;其中,两个所述驱动轮分别位于对应于所述滑轨的第一驱动位置和第二驱动位置;所述驱动轴约束于所述滑轨支架上固定的驱动轴固定座;所述驱动轮、所述链条、所述舵轮为一组;其中,所述舵轮约束于所述滑轨支架上固定的舵轮固定座;所述驱动轮用于带动所述链条往复运动;所述链条与所述滑块固定连接,以同步运动。
在一个实施方式中,所述车身支架与对应所述滑块转动连接方式至少包括以下一种;所述转动连接轴与所述车身支架固定连接,所述转动连接轴与所述滑块转动连接;或,所述转动连接轴与所述车身支架转动连接,所述转动连接轴与所述滑块固定连接;或,所述转动连接轴与所述车身支架转动连接,所述转动连接轴与所述滑块转动连接。
在一个实施方式中,所述转动连接轴至少为以下一种:所述转动连接轴的根数为一根,所述转动连接轴的两端分别垂直连接于两个所述滑轨上的所述滑块;所述转动连接轴转动连接于所述车身支架的所述第一位置,并穿过所述第一位置;所述转动连接轴的根数为两根,所述转动连接轴的一端垂直连接于该转动连接轴对应所述车身支架近距离处的所述滑块;所述转动连接轴另一端转动连接于所述车身支架的所述第一位置。
在一个实施方式中,还包括自平衡系统,所述自平衡系统用于控制车身平衡;所述自平衡系统至少包括角度检测装置,所述角度检测装置用于获取所述车身的倾角数值。
在一个实施方式中,所述自平衡系统控制车身平衡情况至少包括以下之一:在所述倾角数值处于第一区间的情况下,其中,所述第一区间中的数据对应的角度为后仰角度,且大于等于预设后仰角度;所述自平衡系统向所述往复机构发送后仰矫正信号,以调整所述车身倾角;在所述倾角数值处于第二区间的情况下,其中,所述第二区间中的数据对应的角度为前倾角度,且大于等于预设前倾角度;所述自平衡系统向所述往复机构发送前倾矫正信号,以调整所述车身倾角。
在一个实施方式中,所述自平衡系统控制车身平衡情况至少包括以下之一:在所述倾角数值处于第三区间的情况下,所述往复机构将所述滑块约束于所述滑轨的当前位置;其中,所述第三区间中的数据对应的角度小于预设前倾角度且小于预设后仰角度。
在一个实施方式中,还包括报警装置;所述报警装置用于在所述倾角数值处于第四区间的情况下,发出报警信号;其中,所述第四区间中的数据对应的角度,大于等于预设后仰报警角度,或大于等于预设前倾报警角度。
本申请实施方式提供了一种可移动机器人,包括底盘;所述底盘搭载有上述任意一项所述的平衡装置。
在一个实施方式中,所述底盘为六轮仿生底盘,所述平衡装置上的车身为座椅或载货箱体。
在本申请实施方式中,所述平衡装置包括:所述车身支架、一对所述滑轨和所述往复机构、所述转动连接轴、所述滑动轴、一对对称布置的所述滑轨支架;其中,所述滑轨上的滑块与所述车身支架的第一位置位置对应,所述滑动轴两端在所述滑动槽的位置与所述车身支架的第二位置位置对应,通过所述滑块在所述滑轨上的移动和所述滑动轴两端在所述滑动槽的位置改变,两者配合,以改变所述车身支架的第一位置和所述车身支架的而第二位置连线倾角,同时也改变了所述车身支架相对于所述滑轨支架位置,已实现调整倾角和调整重心的作用。角度调节范围大,重心调节范围大,成本低,体积小,结构简单,易于安装。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
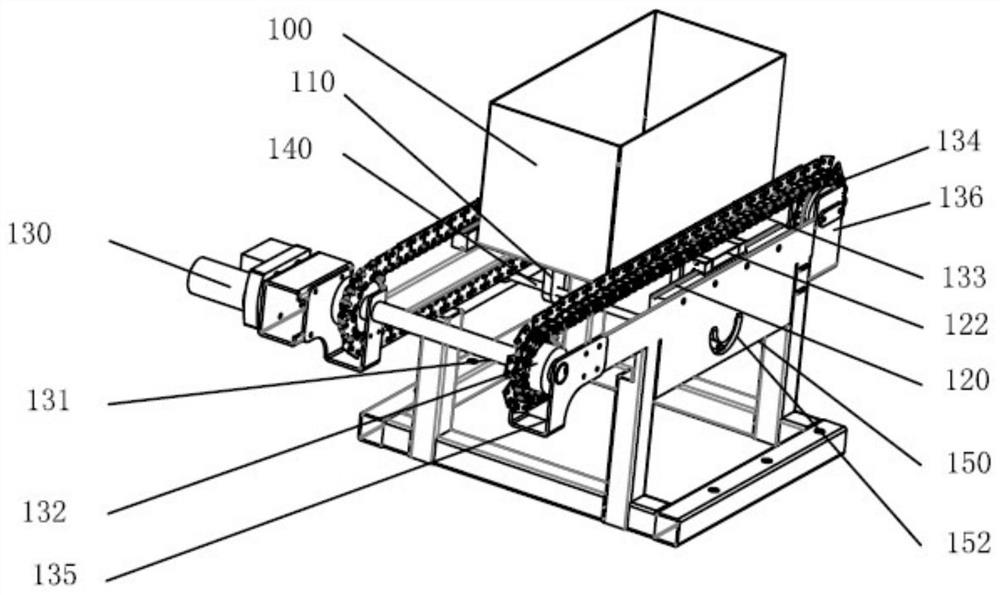
图1是本说明书实施方式的一个平衡装置结构示意图;
图2是本说明书实施方式的一个平衡装置三视图;
图3是本说明书实施方式的一个车身调整示意图;
图4是本说明书实施方式的另一个车身调整示意图;
图5是本说明书实施方式的一个平衡装置具有多个车身支架的结构示意图;
图6是本说明书实施方式的一个用于载人的可移动机器人的结构示意图;
图7是本说明书实施方式的一个可移动机器人上下坡示意图;
图8是本说明书实施方式的一个用于载货的可移动机器人的结构示意图;
附图说明:100、车身,110、车身支架,120、滑轨,122、滑块,130、驱动舵机,131、驱动轴,132、驱动轮,133、链条,134、舵轮,135、驱动轴固定座,136、舵轮固定座,140、滑动轴,150、滑轨支架,152、滑动槽,160、转动连接轴,200、平衡装置,300、座椅,400、六轮仿生底盘,500、载货箱体,600、摄像装置。
具体实施方式
为了使本技术领域的人员更好地理解本申请中的技术方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本申请。
本说明书实施方式提供了一种平衡装置,所述平衡装置可以包括:车身支架110,所述车身支架110用于支撑车身100;其中,所述车身支架110的上端固定连接于所述车身100下端面;一对滑轨120和往复机构,其中,所述往复机构用于提供与所述滑轨120配合的滑块122往复动力;转动连接轴160,所述转动连接轴160为所述车身支架110与对应所述滑块122之间的转动连接件;所述转动连接轴160的一端垂直连接于所述滑块122,所述转动连接轴160连接于所述车身支架110的第一位置,所述转动连接轴160的轴心线与所述车身支架110运动轨迹平面垂直;滑动轴140,所述滑动轴140垂直连接于所述车身支架110的第二位置,且与所述转动连接轴160平行;一对对称布置的滑轨支架150,所述滑轨支架150用于支撑所述滑轨120,所述滑轨支架150架体布置有滑动槽152;所述滑动轴140的两端分别与所述滑动槽152匹配。
在本说明书中为了方便说明,所述车身100、所述平衡装置、所述滑轨120、所述滑块122等的前与后的定义都是以所述车身100前进方向定义。具体的,所述车身100的前进方向为前,反方向为后。进一步的,以该基准来定义所述滑轨120的最前端和最后端,同样以该基准来定义所述滑动槽152的最前端和最后端等。此处不做具体赘述。需要说明的是,上述定义的前与后只是为了本申请方便说明,并不造成具体限定。本申请的平衡装置可以搭载于360度自由调整的底盘,前与后可以进行转换。
在本实施方式中,所述车身支架110用于支撑车身100。所述车身100可以是指搭载于所述平衡装置上的被搭载物。具体的,所述车身100可以是座椅300,也可以是载货箱体500;其中,所述座椅300可以用于坐人,所述载货箱体500可以用于搭载货物。
在本实施方式中,所述车身支架110的上端固定连接于所述车身100下端面。具体的,所述车身支架110的上端可以是连接端面,可以通过螺栓将该连接端面与所述车身100下端面固定连接。也可以采用其他固定连接方式,如焊接等,也可以采用中间件将所述车身支架110的上端固定连接于所述车身100下端面。将所述车身支架110的上端固定连接于所述车身100下端面可以使得所述车身100与所述车身支架110同步运动。例如,所述车身100的下端面与所述车身支架110中心线保持90度垂直,在所述车身支架110平移或倾斜时,所述车身100也同步平移或保持90度同步倾斜。
在本实施方式中,所述车身支架110可以是一个,也可以是多个,所述车身支架110为一个时,所述车身支架110上端固定连接于所述车身100下端面中心。所述车身支架110为多个时,所述车身支架110以所述车身100中心线轴对称布置,以平衡所述车身100的重量。
在本实施方式中,一对所述滑轨120平行布置,所述滑轨120可以以所述车身100的中心线对称布置。每个所述滑轨120上可以约束有一个所述滑块122,所述滑块122可以沿所述滑轨120轨道滑动。
在本实施方式中,所述往复机构可以用于提供与所述滑轨120配合的滑块122往复动力。具体的,所述往复机构可以是两个同步推杆,沿所述滑轨120同步伸长和收缩,以控制所述滑块122在所述滑轨120上的位置。所述往复机构还可以是链条133结构。具体的,所述往复机构可以包括:驱动舵机130,驱动轴131,两个舵轮134,两条链条133;所述驱动舵机130用于提供驱动轴131旋转动力;所述驱动轴131用于带动配合的两个驱动轮132旋转;其中,两个所述驱动轮132分别位于对应于所述滑轨120的第一驱动位置和第二驱动位置;所述驱动轴131约束于所述滑轨支架150上固定的驱动轴固定座135;所述驱动轮132、所述链条133、所述舵轮134为一组;其中,所述舵轮134约束于所述滑轨支架150上固定的舵轮固定座136;所述驱动轮132用于带动所述链条133往复运动;所述链条133与所述滑块122固定连接,以同步运动。
在本实施方式中,所述转动连接轴160可以是所述车身支架110与对应所述滑块122之间的转动连接件,所述车身支架110与对应所述滑块122通过所述转动连接轴160转动连接。具体的,所述车身支架110与对应所述滑块122转动连接的方式可以是所述转动连接轴160与所述车身支架110固定连接,所述转动连接轴160与所述滑块122转动连接;或,所述转动连接轴160与所述车身支架110转动连接,所述转动连接轴160与所述滑块122固定连接;或,所述转动连接轴160与所述车身支架110转动连接,所述转动连接轴160与所述滑块122转动连接。在一个优选的实施方式中,所述转动连接轴160的一端垂直连接于所述滑块122,所述转动连接轴160的轴心线与所述滑块122往复运动轨迹垂直;所述转动连接轴160转动连接于所述车身支架110的第一位置,所述转动连接轴160的轴心线与所述车身支架110运动轨迹平面垂直。
在一个实施场景中,所述转动连接轴160的根数为一根,所述转动连接轴160的两端分别垂直连接于两个所述滑轨120上的所述滑块122;所述转动连接轴160转动连接于所述车身支架110的所述第一位置,并穿过所述第一位置。在另一个实施场景中,所述转动连接轴160的根数为两根,所述转动连接轴160的一端垂直连接于该转动连接轴160对应所述车身支架110近距离处的所述滑块122;所述转动连接轴160另一端转动连接于所述车身支架110的所述第一位置。
在本实施方式中,所述滑动轴140垂直连接于所述车身支架110的第二位置,且与所述转动连接轴160平行。所述滑动连接轴与所述车身支架110可以是固定连接,也可以转动连接,此处不做具体限定。在一个优选的实施方式中,所述滑动连接轴与所述车身支架110固定连接于所述车身支架110的第二位置,该种实施方式结构更加稳定。所述车身支架110的第二位置可以位于所述车身支架110的第一位置的下方。具体的,例如,所述车身支架110长度为60cm,以所述车身支架110的最下端为0基准线。所述第一位置位于50cm处,所述第二位置位于10cm处,在第一位置下方。在所述第二位置和所述第一位置位置改变时,与该车身支架110连接的车身100位置也改变;在所述第二位置和所述第一位置所成直线与水平面夹角改变时,与该车身支架110连接的车身100倾角也对应改变。当然,本示例仅进行举例描述,不进行具体限制。
在本实施方式中,一对所述滑轨支架150分别对应于所述滑轨120布置,可以用于支撑所述滑轨120。所述滑轨支架150架体布置有滑动槽152,具体的,所述滑动槽152可以是U型槽也可以是V型槽。所述滑动槽152可以是设置于所述滑轨支架150上靠近所述车身支架110一侧,所述滑动槽152也可以是所述滑轨支架150上通透槽。
在本实施方式中,所述滑动轴140的两端分别约束于所述滑动槽152。所述滑动轴140与所述车身支架110的垂直连接方式可以是固定连接,也可以是转动连接。具体的,可以根据实际使用环境和使用效果进行选择,此处不做具体限定。所述滑动轴140的两端也可以约束有滑动帽,该滑动帽约束于所述滑动轴140两端,该滑动帽与所述滑动槽152配合,该滑动帽只能以所述滑动轴140轴心线进行自转。本实施方式中,所述滑动轴140还可以设计有封盖,所述封盖用于封住所述滑动轴140两端,防止所述滑动轴沿轴向方向位移。所述滑动轴140也可以是中间粗两端细,两端处于所述滑动槽152中,以防止所述滑动轴140沿轴向方向位移。
在本实施方式中,所述滑轨120和所述滑动槽152共同作用,用于控制车身100的倾角。当所述滑动轴140的两端位于所述滑动槽152的最前端,所述滑块122也位于所述滑轨120最前端时,所述车身100相对于一对所述滑轨120组成的平面达到前倾最大角度。当所述滑动轴140的两端位于所述滑动槽152的最后端,所述滑块122也位于所述滑轨120最后端时,所述车身100相对于一对所述滑轨120组成的平面达到后仰最大角度。以此可以用于平衡所述车身100在上下坡时的坡度。
在本实施方式中,通过往复机构推动所述滑块122在所述滑轨120上移动,所述车身支架110的第一位置对应所述滑轨120的位置,与所述滑块122同步位移。而所述滑动轴140连接于所述车身支架110的第二位置,所述滑动轴140的两端分别约束于所述滑动槽152中。在所述滑块122移动时,所述滑动轴140也会在所述滑动槽152中相应移动。由于所述滑动轴140的两端分别约束于所述滑动槽152中,所述滑块122位于所述滑轨120中不同位置时,所述车身支架110倾斜不同角度。在一个优选的实施方式中,当所述滑块122位于最前端时,所述车身100相对于一对所述滑轨120组成的平面达到的前倾角度为45°;当所述滑块122位于最后端时,所述车身100相对于一对所述滑轨120组成的平面达到的后仰角度为45°。
在本实施方式中,所述平衡机构还可以包括有自平衡系统。具体的,例如,所述自平衡系统可以包括IMU(Inertial measurement unit)测量物体三轴姿态角及加速度的装置。当上坡时,IMU检测到车身100倾斜10°,程序就会控制电机转动,带动车身100向前倾斜,直到检测到车身100倾斜角度小于等于±10°,则控制电机停止转动。
本申请实施方式提供的所述平衡装置,可以实现倾斜、平移两方面的重心调节,重心调节范围大,成本低,体积小,结构简单,易于安装。
请参阅图1、图2为本说明书的一个具体实施场景。
在本场景示例中,所述往复机构由所述驱动舵机130,所述驱动轴131,所述舵轮134,所述链条133组成。所述驱动舵机130输出动力,通过所述驱动轴131带动所述驱动轮132,所述驱动轮132带动所述链条133,而所述链条133与所述滑块122相连,所述舵轮134作为所述驱动轮132的从动轮,由所述链条133带动。所述链条133带动滑块122在滑轨120上移动,两者同步运动。而与所述车身支架110连接的所述滑动轴140在所述滑轨支架150的所述滑动槽152,U形轨道(U型槽)上运动,两项结合,从而形成倾斜、平移两方面的重心调节。
在本场景示例中,还包括自平衡系统,所述自平衡系统包括IMU。IMU实时监测所述车身100的倾斜角度。当超过预设角度时,发送矫正信号。例如,预设前倾角度为+10°,预设后倾角度为-10°。当所述自平衡系统获取的倾角数值超过+10°或-10°时,所述自平衡系统发送前倾矫正信号或后仰矫正信号,以控制所述驱动舵机130正向转动或反向转动,以调整所述车身100倾角。
需要说明的是,本说明书中倾角数值大于等于预设前倾角度或后倾角度,不是专指数值上的大于等于,而是指倾斜程度的大于等于。例如,倾角数值为大于等于预设后仰角度-10°中的倾角数值可能是-13°等。再例如,倾角范围为0°到180°,区间(0°,90°)用于表示前倾,(90°,180°)用于表示后仰,越靠近90°表示倾斜程度越大。
图3图4为本说明书的车身100调整示意图。在一个场景示例中,以左边为车身100前端,所述平衡装置在上坡时前端高后端低,往后仰,IMU检测到后仰角度超过预设后仰角度时,程序发送后仰矫正信号,所述驱动舵机130正转,所述链条133带动所述滑块122向前滑动,使得所述车身100后端相对所述平衡装置抬高,所述车身100前前端相对所述平衡装置降低,以平衡所述平衡装置在上坡时产生后仰。同理,请参阅图4,在该场景中,所述平衡装置在下坡时产生前倾,程序发送前倾矫正信号,所述驱动舵机130反转,所述链条133带动所述滑块122向后滑动,使得所述车身100后端相对所述平衡装置降低,所述车身100前前端相对所述平衡装置抬高,以平衡所述平衡装置在上坡时产生前倾。在本场景示例中所述驱动舵机130位于所述车身100的后端。当然在其他场景中,所述驱动舵机130也可以位于所述车身100的前端,其控制程序对应改变,也可达到相同效果。此处不做具体赘述。
请参阅图5,在另一个场景示例中,所述车身支架110有3根,共同支撑所述车身100。在该场景示例中,所述转动连接轴160两端分别连接于两个所述滑轨120上的所述滑块122。
在本场景示例中,采用多根车身支架110,使得支撑更稳定。
在一个实施方式中,所述滑动槽152为U型槽。
在倾斜、平移两方面的重心调节所述U型槽适用性更强,更稳定。
在一个实施方式中,车身支架110为两个,两个车身支架110以所述车身100对称布置。
请参阅图1至图4,为所述车身支架110为两个的实施场景。所述车身支架110为两个时,结构相对简单,也有足够的稳定性。
在一个实施方式中,所述往复机构包括:驱动舵机130,驱动轴131,两个舵轮134,两条链条133;所述驱动舵机130用于提供驱动轴131旋转动力;所述驱动轴131用于带动配合的两个驱动轮132旋转;其中,两个所述驱动轮132分别位于对应于所述滑轨120的第一驱动位置和第二驱动位置;所述驱动轴131约束于所述滑轨支架150上固定的驱动轴固定座135;所述驱动轮132、所述链条133、所述舵轮134为一组;其中,所述舵轮134约束于所述滑轨支架150上固定的舵轮固定座136;所述驱动轮132用于带动所述链条133往复运动;所述链条133与所述滑块122固定连接,以同步运动。
在本实施方式中,所述驱动轮132和所述驱动轴131可以是一体式,也可以是两者可以进行装配。所述舵轮134可以是所述驱动轮132的从动轮,由所述链条133带动。在本实施方式中,所述链条133与所述滑块122固定连接,两者可以同步运动。具体的,例如,在所述驱动轮132旋转时,带动所述链条133,以带动所述滑块122。通过所述驱动轮132的正转和反转以控制所述滑块122往复运动。当所述驱动轮132静止时,所述滑块122约束于所述滑轨120上的当前位置。
在本实施方式中,所述第一驱动位置和所述第二驱动位置分别对应于两个所述滑轨120的位置。
该结构由于所述驱动轮132位于同一根所述驱动轴131,同步性较好,更加稳定。
在一个实施方式中,所述车身支架110与对应所述滑块122转动连接方式至少包括以下一种;所述转动连接轴160与所述车身支架110固定连接,所述转动连接轴160与所述滑块122转动连接;或,所述转动连接轴160与所述车身支架110转动连接,所述转动连接轴160与所述滑块122固定连接;或,所述转动连接轴160与所述车身支架110转动连接,所述转动连接轴160与所述滑块122转动连接。
在本实施方式中,所述转动连接轴160可以是所述车身支架110与对应所述滑块122之间的转动连接件,所述车身支架110与对应所述滑块122通过所述转动连接轴160转动连接。具体的,所述转动连接轴160和所述车身支架110与对应所述滑块122连接处至少有一处的连接方式为转动连接。
在一个实施方式中,所述转动连接轴160至少为以下一种:所述转动连接轴160的根数为一根,所述转动连接轴160的两端分别垂直连接于两个所述滑轨120上的所述滑块122;所述转动连接轴160转动连接于所述车身支架110的所述第一位置,并穿过所述第一位置;所述转动连接轴160的根数为两根,所述转动连接轴160的一端垂直连接于该转动连接轴160对应所述车身支架110近距离处的所述滑块122;所述转动连接轴160另一端转动连接于所述车身支架110的所述第一位置。
在本实施方式中,所述转动连接轴160可以是一根,两端连接于所述滑块122,中间部分穿过所有的所述车身支架110。在所述车身支架110为两根的情况时,所述转动连接轴160可以是两根,每根所述转动连接轴160的一端连接于一个所述滑块122,另一端连接于就近的所述车身支架110。
在一个优选的实施方式中,所述车身支架110为两个,两个车身支架110以所述车身100对称布置,所述转动连接轴160为两根,每根所述转动连接轴160的一端连接于一个所述滑块122,另一端连接于就近的所述车身支架110。该种连接方式装配相对简单。
在一个实施方式中,所述平衡装置还可以包括自平衡系统,所述自平衡系统用于控制车身100平衡;所述自平衡系统至少包括角度检测装置,所述角度检测装置用于获取所述车身100的倾角数值。
在本实施方式中,所述角度检测装置可以是IMU。所述角度检测装置用于获取所述车身100的倾角数值可以是每隔一定的时间间隔进行检测以确定当前所述车身100的倾角。
在一个实施方式中,所述自平衡系统控制车身100平衡情况至少包括以下之一:在所述倾角数值处于第一区间的情况下,其中,所述第一区间中的数据对应的角度为后仰角度,且大于等于预设后仰角度;所述自平衡系统向所述往复机构发送后仰矫正信号,以调整所述车身100倾角;在所述倾角数值处于第二区间的情况下,其中,所述第二区间中的数据对应的角度为前倾角度,且大于等于预设前倾角度;所述自平衡系统向所述往复机构发送前倾矫正信号,以调整所述车身100倾角。
在本实施方式中,所述倾角数值大于等于预设前倾角度或后倾角度,不是专指数值上的大于等于,而是指倾斜程度的大于等于。例如,倾角数值为大于等于预设后仰角度-10°中的倾角数值可能是-13°等。再例如,倾角范围为0°到180°,区间(0°,90°)用于表示前倾,(90°,180°)用于表示后仰,越靠近90°表示倾斜程度越大。在本实施方式中,所述预设后仰角度可以是指预设的车身100后仰角度阈值。例如,当所述车身100的后仰角度达到10°时,需要进行调整,以平衡。同理,所述预设前倾角度可以是指预设的车身100前倾角度阈值。可以结合图3和图4的具体场景示例进行解释,此处不做具体赘述。
在一个实施方式中,所述自平衡系统控制车身100平衡情况至少包括以下之一:在所述倾角数值处于第三区间的情况下,所述往复机构将所述滑块122约束于所述滑轨120的当前位置;其中,所述第三区间中的数据对应的角度小于预设前倾角度且小于预设后仰角度。
在本实施方式中,所述第三区间用于表示该区间中对应的倾角范围为不需调整的倾角范围,所述往复机构的电机可以不工作,将所述滑块122约束于所述滑轨120的当前位置。例如,所述第三区间数据对应的角度在前倾5°和后仰5°之间,表明所述车身100很平稳,无需调节角度,所述往复机构的电机可以不工作,将所述滑块122约束于所述滑轨120的当前位置。当然,所述第三区间数据对应的角度范围可以进行放大和缩小,以适应具体工作环境。
在一个实施方式中,还包括报警装置;所述报警装置用于在所述倾角数值处于第四区间的情况下,发出报警信号;其中,所述第四区间中的数据对应的角度,大于等于预设后仰报警角度,或大于等于预设前倾报警角度。
在本实施方式中,在所述平衡装置进行角度平衡后,所述车身100的倾斜角度依旧超过阈值,则所述自平衡装置向所述报警装置发送报警信号。所述报警装置进行报警。例如,发出尖锐的声音以提示用户。具体的,例如,在所述平衡装置进行角度平衡后,所述车身100的倾斜角度超过30°,则所述自平衡装置向所述报警装置发送报警信号。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
本说明书实施方式还提供了一种可移动机器人,可以包括底盘;所述底盘搭载有上述任意一项所述的平衡装置。
在本实施方式中,所述可移动机器人可以是一种代步车,也可以是一种载货车等。具体的,例如,所述可移动机器人可以是一种单人代步车。请参阅图图6和图7,该代步车搭载的六轮仿生底盘400可以平稳的在石子路、土路等凹凸不平的地面行驶,可以平稳的越过减速带、垂直障碍物等障碍。该代步车搭载的平衡装置可以调整车身100的重心位置,保证代步车在通过斜坡或障碍物时不会倾覆,并始终保证乘坐人员身体是竖直状态的。该代步车可以手动驾驶,也可加载传感器实现自动驾驶的功能。该代步车可以最大载重150Kg,纵向倾斜角度±45°,可攀爬30°斜坡或高度在20cm以内的垂直障碍物。再例如,所述可移动机器人可以是载货车,请参阅图8。该跟随载货车搭载的自平衡机构可以调整车身100的重心位置,保证载货车在通过斜坡或障碍物时不会倾覆,并始终保证载货架是竖直状态的。该跟随载货车可以假装摄像装置600等,以获取四周环境数据。
在一个实施方式中,所述底盘为六轮仿生底盘400,所述平衡装置上的车身100为座椅300或载货箱体500。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
需要说明的是,在本申请的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施方式和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的申请主题的一部分。
- 平衡装置和可移动机器人
- 独立悬架移动机器人用四轮差速滑动转向动力平衡装置