森林环境巡查用自主避让枝叶的无人机
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及无人机技术领域,具体为森林环境巡查用自主避让枝叶的无人机。
背景技术
森林环境指的是森林生活空间,其包括地上空间及地下空间,是人类自然环境中生物环境的重要组成部分,是地球生物圈中的重要成分,也是地球陆地生态系统的主体。
森林是非常宝贵的自然资源,特别是随着人类对自然界的不断侵蚀,导致森林面积急剧降低,因此保护森林已经成为了环境保护中非常重要的一个环节。保护森林除了要防止滥砍滥伐之外,对森林的防火也是非常重要。森林火灾是世界性的林业重要灾害之一,一年四季都有可能发生,不仅会造成森林资源的重大损失,还会带来严重的环境污染。森林火灾具有突发性、随机性、损失大和引发原因多等特点,如何及时发现火情十分重要。目前,在我国很多林业部门还是采用人工巡查、监视的方式来进行森林防火,采用这种方式不仅工作效率低,并且监控效果还不好。
近些年来,随着科技的迅猛发展,无人机在各个行业的应用也日益广泛,现阶段,无人机的应用已经涉及到航拍、农林植保、地质勘探、电力巡检、油气管路巡查、高速公路事故管理、森林防火巡查、污染环境勘察、反恐维稳公安执法、应急救援与救护、抢险救灾、海岸线巡查等领域应用。无人机森林巡查在森林火灾防控工作中发挥着重要作用,它不仅可以有效协助日常巡检工作,而且还可以将警报信息群发报告相关人员,比如用户以及远在几公里外的消防人员。
发明内容
本发明的目的在于提供森林环境巡查用自主避让枝叶的无人机,以解决上述背景技术中提出的问题。
为了解决上述技术问题,本发明提供如下技术方案:森林环境巡查用自主避让枝叶的无人机,该无人机包括外壳、平衡机构、旋翼机构,所述平衡机构及旋翼机构均设置在外壳上,所述平衡机构通过磁场使无人机的重心发生移动,平衡机构使无人机快速恢复平衡,所述旋翼机构通过重力及陀螺仪结构始终水平状态,旋翼机构为无人机的飞行提供动力。当无人机发生倾斜时,旋翼机构在自身重力以及陀螺仪结构的作用下快速调整自身状态,快速的恢复水平状态,而且不论无人机发生何种角度的倾斜时,旋翼机构都能处于水平状态,并为无人机提供平衡飞行的动力,本发明对于发生倾斜具有快速反应的效果,平衡机构在无人机机身发生倾斜时,通过对内部平衡块的位置调整,使得无人机的重心快速上移,使得无人机在平衡机构的作用下快速的恢复平衡。
作为优选技术方案,所述外壳上设置有平衡板;所述平衡机构设置在平衡板上,平衡机构包括至少四组平衡组件,至少四组所述平衡组件通过磁悬浮原理对无人机的重心进行调整;所述旋翼机构设置在平衡板上,旋翼机构包括至少四组旋翼组件,至少四组所述旋翼组件与至少四组平衡组件交叉设置,至少四组所述旋翼组件通过自身重力及陀螺仪结构对无人机的倾斜作出快速反应。平衡板为平衡机构以及旋翼机构的安装提供支撑,平衡组件通过磁悬浮原理使平衡块进行移动,从而实现无人机重心的上移,旋翼组件为无人机的飞行提供动力,并为无人机在倾斜后保持平衡飞行提供支撑,平衡组件与旋翼组件相互交错设置,使得无论无人机从哪个角度倾斜,平衡组件都能使无人机快速平衡。
作为优选技术方案,至少四组所述旋翼组件均包括外环、设置在外环中的十字环,所述外环与平衡板固定,所述十字环中设置有承载板,所述承载板下方设置有旋转电机,所述旋转电机上设置有螺旋桨,所述螺旋桨位于承载板上方。外环为十字环的安装提供支撑,同时,当无人机需要定向飞行时,外环通过磁场对十字环的位置进行固定,使得无人机可以定向飞行即朝向某一方向进行飞行,十字环为承载板的安装提供支撑,同时,十字环可以森林中的树叶和树枝进行阻挡,防止树叶及树枝对螺旋桨造成影响,旋转电机为螺旋桨的转动提供动力,同时为旋翼组件的平衡提供重心,使得旋翼组件在旋转电机重量的支撑下始终处于水平状态,螺旋桨为无人机的飞行提供支撑,而且,旋翼组件在无人机巡查系统的控制下收到平衡板内,从而实现无人机对枝叶的自主避让。
作为优选技术方案,所述十字环与外环转动连接,所述外环内侧设置有滑道,所述十字环两端对称设置有连通轴,两组所述连通轴另一端均设置有旋转台,两组所述旋转台远离连通轴的一侧均设置有连通球,两组所述连通球均位于滑道中,连通球与滑道滑动连接,两组所述连通轴之间设置有密封板,两组所述密封板上端嵌入外环内,所述密封板与外环转动连接。当无人机发生倾斜时,十字环通过连通球及滑道在外环上进行转动,并在旋转电机的支撑下处于水平状态,滑道为十字环的位置调整提供支撑,连通轴为旋转台及连通球的安装提供支撑,旋转台为无人机的定向飞行提供支持,当十字环固定在外环上时,旋转台通过转动对十字换的转动方向进行调整,连通球为十字环与外环的转动连接通过支撑,密封板对联动轴之间的滑道进行封堵,防止外界的灰尘或森林内部树叶上的水滴进入到滑道中。
作为优选技术方案,所述十字环与外环电性连接,所述外环内部在滑道的上下两端均设置有电极滑道,两组所述电极滑道均与平衡板电性连接;两组所述连通球上均设置有套壳,两组所述套壳均与滑道滑动连接,所述套壳上对应两组电极滑道的位置设置有导电球,两组所述导电球分别位于两组电极滑道中,所述连通球与套壳电性连接,所述旋转电机与两组连通球电性连接。电极滑道分为正极滑道和负极滑道,电极滑道从平衡板处获得电力,套壳为球形套壳,并套设在连通球的外侧,套壳与滑道进行滑动连接,同时,套壳与电极滑道进行电性连接,转动电机的正负极通过导线分别与两组套壳进行电性连接,进而从外环上获得转动所需要的电力,导电球为套壳与电极滑道的电性连接提供支撑,连通球与套壳转动连接,当无人机发生倾斜时,套壳在滑道中进行滑动,连通球在套壳内部进行转动,从而实现对旋翼组件姿态的调整,使得旋翼组件处于水平状态。
作为优选技术方案,所述外环中位于滑道的外侧设置有若干组电磁块,若干组所述电磁块中均设置有线圈,所述线圈均与平衡板电性连接,所述套壳及连通球均由铁质材料制成;所述平衡板内部位于至少四组外环的下方两端均设置有伸缩缸,所述伸缩缸与外环固定,所述平衡板上位于十字环的下方设置有通槽。电磁块为十字环在外环中的位置固定提供基础,当无人机需要定向飞行时,电磁块通电产生磁场,并通过磁场对套壳及连通球进行磁吸,使得十字环固定在外环中,同时,滑道外侧设置有若干组电磁块,通过电磁块往一个方向的有序通电,从而产生行走的磁场,如同跑马灯一样,套壳及连通球在一个接一个磁场的吸引下在滑道中进行位置移动,从而实现对十字环方向上的调整,进而实现对无人机飞行方向上的调整,外环与旋转台相互配合实现对无人机任何飞行方向上的调整,伸缩缸为旋翼组件伸出平衡板提供动力,通槽为旋翼组件收进平衡板提供支撑,防止十字环受到平衡板的限制而导致旋翼组件无法收进平衡板内。
作为优选技术方案,所述平衡板内部设置有平衡空间,至少四组所述平衡组件均位于平衡空间内,至少四组平衡组件均包括平衡环,所述平衡环与平衡板转动连接,平衡环两端对称设置有支撑轴,两组所述支撑轴远离平衡环的一端均设置有第二连通球,所述平衡板内部对应第二连通球的位置设置有滑槽,所述第二连通球位于滑槽中并与滑槽滑动连接。平衡空间为平衡组件的安装提供支撑,平衡环为支撑轴以及平衡轨的安装提供支撑,滑槽为平衡轴及第二连通球的放置提供空间,第二连通球与滑槽之间的连接关系如同连通球、套壳与滑道之间的连接关系,第二连通球即与滑槽滑动连接,也与滑槽电性连接,滑槽的内部设置有电极滑道,第二连通球上设置有导电球,导电球与电极滑道电性连接。
作为优选技术方案,所述平衡环与平衡板电性连接,平衡环内部设置有平衡轨,所述平衡轨上设置有平衡块,所述平衡轨及平衡块均与平衡环电性连接。平衡轨上端设置有直线电动机次级绕组,两侧设置有次级线圈,平衡块安装在平衡轨上,平衡块内部上端面设置有直线电动机初级绕组,两侧设置有导向电磁铁,下端面位于两组次级线圈的下方安装有初级线圈,平衡轨迹平衡块从第二连通球处获得电力,平衡轨通过磁悬浮原理使平衡块进行移动,当无人机发生倾斜时,平衡环不通电,平衡块在平衡轨上滑动,同时通过自身重量使平衡环在平衡空间内转动,使得平衡块处于无人机倾斜方向上的最低点,随后,平衡环导电,平衡块在平衡轨上快速往上升,从而使得无人机的重力上移,进而加快无人机的平衡过程。
作为优选技术方案,至少四组所述平衡轨的两端均设置挡块;所述平衡空间内部上端面的中间位置设置有线圈。挡块对平衡块在平衡轨的滑动距离进行控制,防止平衡块与平衡空间内壁相撞,线圈通电后产生磁场,当无人机正常调整飞行姿态时,线圈通过磁场对平衡块进行磁吸,使平衡块处于平衡轨的中部位置,进而防止平衡块的随意移动而导致的无人机飞行不平衡,当无人机被森林中的树枝或其他东西打到而导致飞行不平衡时,线圈快速断电,使得平衡块参与到无人机恢复平衡的过程中。
作为优选技术方案,所述外壳中设置有无人机巡查系统,所述无人机巡查系统与平衡板电性连接,所述外壳呈圆盘状,外壳横切面呈椭圆状。无人机巡查系统为平衡机构以及旋翼机构提供电力,同时,无人机巡查系统对森林中的环境进行巡查,外壳为无人机机体,外壳俯视图呈圆盘状,且横切面为椭圆形,外观类似于飞碟,从而减少在森林中飞行时,森林中气流对无人机飞行的影响,同时,流线型的设置,避免了被断树枝砸到而无法快速脱身的事情出现。
与现有技术相比,本发明所达到的有益效果是:
1、本发明中,当无人机发生倾斜时,旋翼机构在自身重力以及陀螺仪结构的作用下快速调整自身状态,快速的恢复水平状态,而且不论无人机发生何种角度的倾斜时,旋翼机构都能处于水平状态,并为无人机提供平衡飞行的动力,而且平衡机构在无人机机身发生倾斜时,通过对内部平衡块的位置调整,使得无人机的重心快速上移,使得无人机在平衡机构的作用下快速的恢复平衡,本发明对于发生倾斜具有快速反应并恢复平衡的能力。
2、本发明中,平衡组件通过磁悬浮原理使平衡块进行移动,从而实现无人机重心的上移,旋翼组件为无人机的飞行提供动力,并为无人机在倾斜后保持平衡飞行提供支撑,平衡组件与旋翼组件相互交错设置,使得无论无人机从哪个角度倾斜,平衡组件都能使无人机快速平衡。
3、本发明中,当无人机需要定向飞行时,电磁块通电产生磁场,并通过磁场对套壳及连通球进行磁吸,使得十字环固定在外环中,同时,滑道外侧设置有若干组电磁块,两个相对的线圈为一组,通过两个电磁块往一个方向有序通电,从而产生行走的磁场,如同跑马灯一样,套壳及连通球在一个接一个磁场的吸引下在滑道中进行位置移动,从而实现对十字环方向上的调整,进而实现对无人机飞行方向上的调整,外环与旋转台相互配合实现对无人机任何飞行方向上的调整,从而使无人机可以在复杂的森林环境中进行任何角度的飞行。
4、本发明中,当无人机需要定向飞行时,外环通过磁场对十字环的位置进行固定,使得无人机可以定向飞行即朝向某一方向进行飞行,同时,十字环可以森林中的树叶和树枝进行阻挡,防止树叶及树枝对螺旋桨造成影响;旋转电机在为螺旋桨的提供转动动力的同时为旋翼组件的平衡提供重心,使得旋翼组件在旋转电机重量的支撑下始终处于水平状态,而且,旋翼组件在无人机巡查系统的控制下收到平衡板内,从而实现无人机对枝叶的自主避让,进而减少森林环境对无人机的工作影响。
5、本发明中,无人机巡查系统对森林中的环境进行巡查,外壳为无人机机体,外壳即机体的俯视图呈圆盘状,横切面为椭圆形,外壳通过类似于飞碟的设置,从而减少在森林中飞行时,森林中气流对无人机飞行的影响,同时,流线型的设置,避免了被断树枝砸到而无法快速脱身的事情出现,使得无人机在森林巡查中面对突然出现的危险可以快速脱离。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
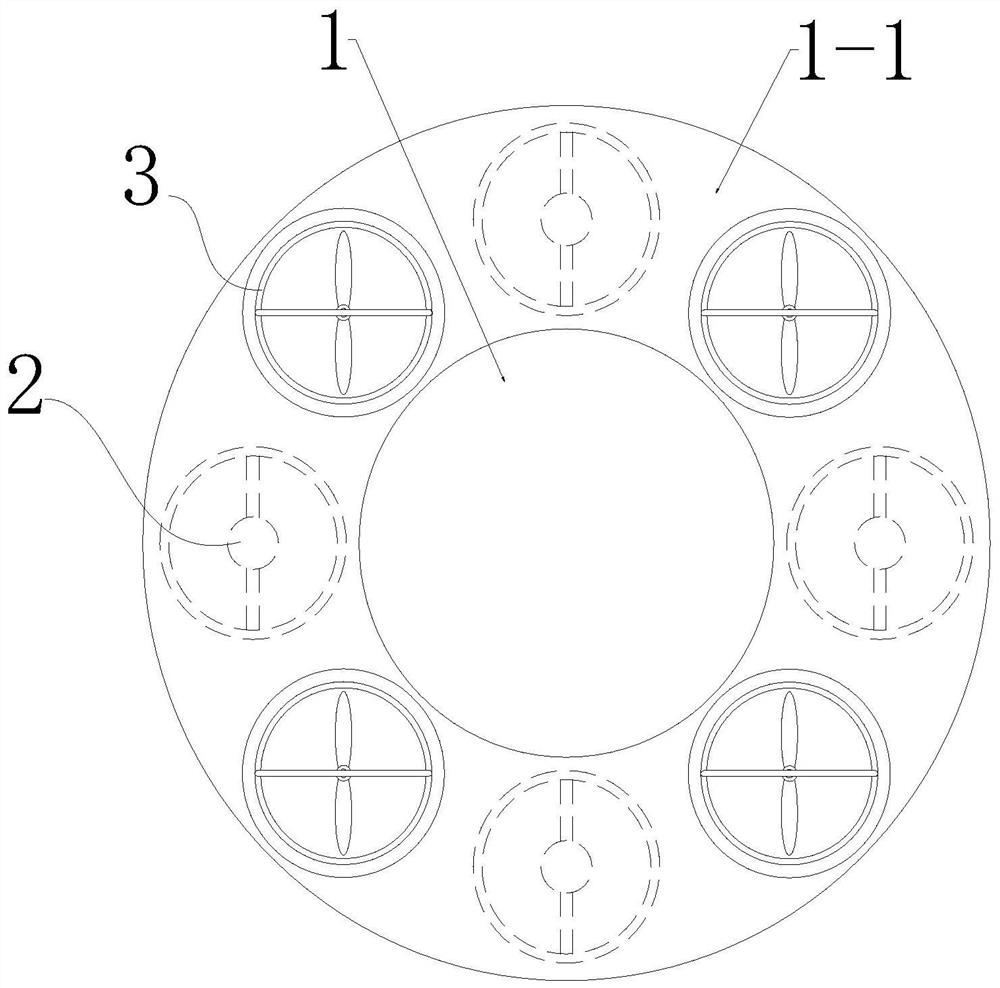
图1是本发明的整体结构俯视图;
图2是本发明的整体结构前视半剖图;
图3是本发明的平衡组件与平衡板连接结构示意图;
图4是本发明的平衡组件结构的俯视图;
图5是本发明的外环与十字环的连接示意图;
图6是本发明的图5中A区域的结构示意图;
图7是本发明的外环内部结构俯视图。
图中:1、外壳;2、平衡机构;3、旋翼机构;1-1、平衡板;1-2、伸缩缸;2-1、平衡环;2-2、支撑轴;2-3、第二连通球;2-4、平衡轨;2-5、平衡块;3-1、外环;3-2、十字环;3-3、旋转电机;3-4、连通球;3-5、套壳;3-6、电磁块;3-11、电极滑道。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-7,本发明提供技术方案:森林环境巡查用自主避让枝叶的无人机,该无人机包括外壳1、平衡机构2、旋翼机构3,外壳1为无人机机体,平衡机构2及旋翼机构3均安装在外壳1上,平衡机构2通过磁场使无人机的重心发生移动,平衡机构2使无人机快速恢复平衡,旋翼机构3通过重力及陀螺仪结构始终水平状态,旋翼机构3为无人机的飞行提供动力。
外壳1俯视看呈圆盘状,外壳1横切面呈椭圆状,外壳1上外侧固定有平衡板1-1,外壳1中安装有无人机巡查系统,无人机巡查系统与平衡板1-1电性连接,无人机巡查系统通过平衡板1-1为平衡机构2以及旋翼机构3提供电力。
平衡板1-1内部加工有平衡空间,平衡空间内部上端面的中间位置安装有线圈,线圈与无人机巡查系统电性连接。
平衡机构2安装在平衡板1-1内部,平衡机构2包括四组平衡组件,四组平衡组件通过磁悬浮原理对无人机的重心进行调整;
四组平衡组件均位于平衡空间内,四组平衡组件均包括平衡环2-1,平衡环2-1两端对称安装有支撑轴2-2,两组支撑轴2-2远离平衡环2-1的一端均固定有第二连通球2-3,平衡板1-1内部对应第二连通球2-3的位置加工有滑槽,第二连通球2-3位于滑槽中并与滑槽滑动连接,滑槽上下两端加工有电极滑道3-11,电机滑道3-11与无人机巡查系统电性连接,电极滑道3-11分为正极滑道和负极滑道,两组第二连通球2-3上下两端分别单独固定安装有正极导电球和负极导电球,正极导线球位于正极滑道中,负极导电球位于负极滑道中,支撑环2-1内部安装有导线并分别与正极导电球和负极导电球电性连接。
平衡环2-1内部固定有平衡轨2-4,平衡轨2-4呈T字型,平衡轨2-4上滑动安装有平衡块2-5,平衡轨2-4及平衡块2-5均与平衡环2-1电性连接,四组平衡轨2-4的两端均固定安装有挡块,平衡轨2-4通过磁悬浮原理使平衡块2-5在平衡空间中进行移动。
旋翼机构3安装在平衡板1-1上,旋翼机构3包括四组旋翼组件,四组旋翼组件与四组平衡组件交叉安装,四组旋翼组件通过自身重力及陀螺仪结构对无人机的倾斜作出快速反应。
四组旋翼组件均包括外环3-1、安装在外环3-1中的十字环3-2,平衡板1-1内部位于四组外环3-1的下方两端均安装有伸缩缸1-2,伸缩缸1-2为电动伸缩缸,伸缩缸1-2与外环3-1固定,平衡板1-1上位于十字环3-2的下方开设有通槽。
十字环3-2中固定安装有承载板,承载板下端面上固定有旋转电机3-3,旋转电机3-3的电机轴贯穿承载板,电机轴上固定安装有螺旋桨,螺旋桨位于承载板上方。
十字环3-2与外环3-1转动连接,外环3-1内侧开设有滑道,十字环3-2两端对称固定有连通轴3-3,两组连通轴3-3另一端均固定有旋转台,旋转台为电动旋转台,两组旋转台远离连通轴3-3的一侧均固定安装有连通球3-4,两组连通球3-4均位于滑道中,连通球3-4与滑道滑动连接,两组连通轴3-3之间固定安装有密封板,两组密封板上端嵌入外环3-1内,密封板与外环3-1转动连接,密封板下端覆盖在滑道的外侧,密封板对滑道进行封堵。
十字环3-2与外环3-1电性连接,外环3-1内部在滑道的上下两端均开设有电极滑道3-11,电极滑道3-11分为正极滑道和负极滑道,两组电极滑道3-11均与平衡板1-1电性连接;
两组连通球3-4上均转动安装有套壳3-5,两组套壳3-5均与滑道滑动连接,两组套壳3-5上对应两组电极滑道3-11的位置分别固定安装有正极导电球和负极导电球,两组导电球分别对应安装在两组电极滑道3-11中,连通球3-4与套壳3-5电性连接,旋转电机3-3通过导线与两组连通球3-4电性连接,两组旋转台均通过导线与两组连通球3-4进行电性连接。
外环3-1中位于滑道的外侧固定安装有若干组电磁块3-6,若干组电磁块3-6中均安装有线圈,每组线圈均与平衡板1-1电性连接,若干组线圈中在同一个直线上且相对的两个线圈为一组,组合后的若干组线圈在无人机巡查系统的控制下有序通电,套壳3-5及连通球3-4均由铁质材料制成。
本发明的工作原理:
需要对森林环境进行巡查时,将无人机巡查系统开启,无人机巡查系统对平衡机构2及旋翼机构3进行控制,使无人机机身处于平衡状态,且通过旋翼机构3进行飞行。
无人机起飞时,平衡块2-5位于平衡轨2-4的中部位置,且平衡板1-1通过磁场对平衡块2-5的位置进行固定,而且,伸缩缸1-2伸展,使四组旋翼组件位于平衡板1-1的上方,便于螺旋桨在平衡板1-1上方进行工作。
无人机在森林中对森林环境进行巡查,当无人机巡查系统检测到前方有树枝阻挡时,控制伸缩缸1-2进行收缩,使四组旋翼组件收进平衡板1-1内部,进而避免只有一组旋翼组件收缩而导致的飞行不平衡。
当无人机任何一侧被掉落的树枝砸中或需要快速调整飞行姿态时,平衡板1-1对平衡环2-1进行通电,使平衡块2-5在平衡轨2-4上快速移动,使得无人机的重心快速上移或下移,上移时,加快无人机恢复飞行平衡,下移时,加快无人机飞行姿态的调整。
而且,当无人机被砸中或进行飞行姿态调整时,十字环3-2在旋转电机3-3重量的影响下在外环3-1上进行转动,使得螺旋桨始终处于水平状态,从而使得无人机机身可以以任何倾斜角度进行飞行,进而可以使无人机穿过狭小的空间,而且,十字环3-2位于螺旋桨的外侧,可以对外部的树枝和树叶进行阻挡,防止枝叶对螺旋桨造成影响。
当无人机需要往某一方向进行飞行时,无人机巡查系统对外环3-1中的电磁块3-6进行通电,使十字环3-2固定在外环3-1上,同时,通过旋转台以及电磁块3-6的有序通电,实现对无人机任何飞行方向的调整,并且通过旋转台和电磁块3-6的设置,可以对无人机的换向作出快速反应,使得无人机快速更换飞行方向,进而使得无人机适应森林中的复杂地势和环境。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 森林环境巡查用自主避让枝叶的无人机
- 一种基于机器视觉的公共安全自主巡查四旋翼无人机