卡车拖车接口
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种拖车与牵引车辆之间的接口、特别是涉及但不限于重型卡车与拖车之间的接口。
背景技术
为了以商业上可行的方式进行操作,物流操作员需要能够以非常灵活的方式使用他们的拖车。这种灵活性的一个非常重要的部分是拖车可以与车队中的任何牵引车辆或独立操作员配对。与这种灵活性相关联的要求在行业内被称为兼容性和互操作性并且适用于耦合设备、气动和电的连接器以及通信协议。
EP546370公开了一种卡车牵引器和拖车电通信系统,所述系统具有位于牵引器中的一个电子控制单元和位于至少一个拖车中的另一电子控制单元,二者分别控制多个开关装置的状态以建立进出标准的七引脚牵引器/拖车电连接器的适当的电连接,其中,数据通信链接用于控制和诊断。
这些要求导致了兼容性和互操作性所涵盖的领域中的技术进步的一定程度的停滞。这是由于车队中车辆的不同车龄以及所有车辆之间的兼容性和互操作性的必要性所致。其中一个示例就是当前通信协议(ISO 11992)及其最大传输速率为250kbit/s。因此,在给定时间内不能够传输大量数据、例如由用于辅助系统的现代传感器生成的数据。这阻止了现代传感设备及其相关联功能的应用。
非先前公开的EP3367678公开了一种在CAN总线上传输视频信号的方法。
发明内容
因此,本发明寻求提供一种适合于卡车拖车组合的接口,所述接口使得能够使用更高的数据传输速率。
根据本发明的第一方面,提供一种在牵引车辆与被牵引车辆之间的通信接口,其中,所述牵引车辆和所述被牵引车辆各自具有连接器,所述连接器借助电缆连接,其中,所述连接器符合选自ISO12098、ISO7638-1/2、ISO1185、ISO3731、ISO11446的标准并且具有引脚,其中,所述引脚中的一些通过双绞线(twisted pairs of wires)连接,其设置用于传输数字差分信号。
根据本发明的第二方面,提供了一种用于牵引车辆与被牵引车辆之间的符合标准的通信接口的连接器,所述牵引车辆和所述被牵引车辆包括ECU,所述ECU适于连接到车辆CAN总线和车辆灯并且可被配置用于高速通信,其中,所述连接器设有数字状态探测器和高速通信协议驱动器,以及用于根据在连接器所连接的车辆上的兼容连接器上可配置用于高速通信的ECU的探测而在它们之间进行切换的装置。
尽管可以简单地定义一个新的接口,但这将是非常昂贵的,因为新的车辆将需要新的接口,另外还需要旧的接口。此类接口添加过去曾在欧洲执行过,并导致了冗余的套的标准连接器,因为拖车通常需要在不同标准ISO 12098:2004、ISO 7638-1/2:2018、ISO1185:2003和ISO 3731:2003以及11446-1/2:2012下的四个连接器。北美市场只有一个电力线连接器,因为市场更倾向于互操作性和简便性,而不是附加功能。在本说明书中,高速通信意味着最大传输速率大于标准所允许的最大传输速率。
附图说明
现在将参考附图更详细地描述本发明的示例性实施例,其中:
图1示意性地示出了半拖挂车的顶板;
图2示出了探测高速模式的流程图;
图3示意性地示出了连接器的布置;
图4示意性地示出了牵引车辆与被牵引车辆之间的数字通信。
具体实施方式
图1示意性地示出了符合欧洲标准的半拖挂车的顶板,其具有用于紧急制动的红线气动连接部1和用于服务制动的黄线气动连接部2。在气动连接部之间布置有四个电连接器,即带有CAN总线的15引脚ISO 12098连接器3、用于EBS功能的7引脚ISO 7638-01连接器4、7引脚ISO 1185连接器5和7引脚ISO 3731连接器6。
在本发明的第一示例性实施例中,ISO 12098连接器和IEEE 802.3ab被重新用于在确保向后兼容性的同时提供高速数据连接。其它连接器和协议组合也是可能的,并且在本发明的范围内。尽管原则上本发明可以在具有至少4根导线的电接口中实现,但是ISO12098连接具有15根导线。一般而言,一根或多根导线连接到接地,一根或多根导线传输电源电压。ISO 12098连接器内的每根导线当前都传输离散信号或连接到接地。然而,在本发明中,当前传输离散信号的至少两根导线可以用作一对,尽管如果可用,也可以使用两根以上的导线。然后,这对导线能够以较低的电压传输数字差分信号,这将允许高数据速率传输。与离散信号相关联的信息可以在数字总线上多路复用并以适当的间隔发送。以这种方式,信息不会丢失。根据有多少离散导线对是可用的,可以使用具有相关联的传输速率的不同标准物理层(例如IEEE 802、BroadR-Reach)。
接口电缆以使得传导离散信号的8根导线符合5类电缆的相关标准(ANSI/TIA/EIA-568-A)的方式进行了修改。以这种方式,电缆可以以高达1Gbit/s的传输速率传输离散信号和数字差分信号。
为了便于数字通信以及向后兼容性,ECU或IC被放置在牵引车辆和被牵引车辆上的连接器附近。该组件被配置成能够自动探测所连接的通信伙伴是与数字信号兼容还是期望离散信号。因此,它可以在“高速”与“传统”模式之间切换。如果ECU/IC或其它相关组件出现任何故障,则传统模式也是系统进入的“安全”模式。在其最简单的形式中,这可以通过对每根离散导线使用一个耗尽型FET和一个增强型FET的电路来实现。
下表显示了ISO 12098连接器和那些优选用于数字信号传输的导线的引脚连接。
在可用的15根导线中,有10根可以用作数字传输的导线对。由于IEEE802.3ab协议只需要4对,所以要么设计4对导线以符合5类电缆(阻抗、每绞线的距离等),并留下2根导线来传输离散信号,要么5对导线设计为符合5类电缆标准,备用导线对用于任何电缆故障,以提高安全性。
接地导线和电源导线保持不变,已经传输数字信号的导线也保持不变,例如用于ISO 11992-3CAN总线的那些导线。该总线可以用作安全相关总线,并可能用于确定“高速”和“传统”。
图2示出了确定是否支持高速模式的流程图。在连接拖车和卡车并接通电源之后的第一步骤201中,在卡车与拖车之间的ISO 12098连接器上建立了ISO 11992CAN连接。在第二步骤202中,ECU在总线上发送消息以查看是否支持高速模式。然后,ECU在步骤203中分别侦听来自卡车或拖车上的对方ECU的高速消息支持信号。如果在经过预先确定的时间间隔之后,并且未接收到对方的支持高速模式的确认,则ECU在步骤204中选择数字状态读取模式。如果接收到确认支持高速模式的信号,则ECU在步骤205中选择IEE 802.3ab驱动器。
图3示意性地示出了具有ISO 12098接口301的连接器的布置,所述连接器具有直接连接到ECU 302的CAN总线(ISO 11992-3)线。来自接口301的信号线连接到数字转换装置303,所述数字转换装置303直接连接到ECU 302以及经由数字状态探测装置304和与数字状态探测装置304并联布置的IEE 802.3ab驱动器305间接连接到ECU 302。然后,ECU 302还被配置成能够向控制对于车灯308的信号的高功率驱动器306以及向视频解码和压缩单元307提供控制信号,所述视频解码和压缩单元307接收来自摄像机309的信号。
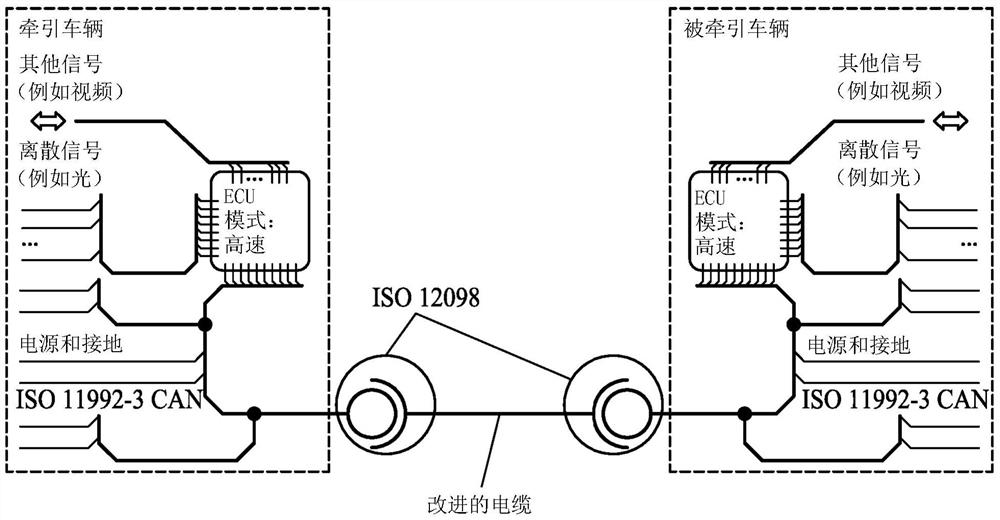
图4示意性地示出了牵引车辆401与被牵引车辆402之间的数字通信。车辆组合设有分别通过电缆405连接的ISO 12098连接器403和404。在牵引车辆401上提供了第一ECU406,所述ECU 406接收诸如视频的信号和诸如用于车灯以及电源和接地的离散信号。ECU406连接到连接器403,并且还连接到ISO 11992-3总线407。
第二ECU 408设置在被牵引车辆402上,所述ECU 408接收诸如视频的信号和诸如用于车灯以及电源和接地的离散信号。ECU 408连接到连接器404并且还连接到ISO 11992-3总线409。
在第一变型方案中,引脚1、2、3、5、6、7、8和10上的导线用于形成符合5类标准的四个双绞线。导线11和12保持与常规ISO 12098连接相同。
在第二变型方案中,导线11和12也用于制造符合5类标准的第五个双绞线。
图5示意性地示出了牵引车辆501与被牵引车辆502之间的通信。车辆组合设有分别通过电缆505连接的相应的ISO 12098连接器503和504。牵引车辆是没有图4所示的ECU的传统车辆。
拖车设有ECU 508,所述ECU 508接收诸如视频的信号和诸如用于车灯以及电源和接地的离散信号。ECU 508连接到连接器504,并且还连接到ISO 11992-3总线509。然而,当ISO12098连接通电时,ECU 58探测到牵引车辆无法与高速数据通信并切换到传统模式,在所述传统模式中通常使用连接电缆中的导线。
- 卡车拖车接口
- 用于拖车卡车的拖车