装配式建筑的吊装调平机构与工作方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于装配式建筑领域。
背景技术
被吊装的装配建筑构件的吊装姿态不一定是绝对理想的,因此需要设计一种能在吊装的过程中实时的微调吊装状态下的姿态的机构。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供一种装配式建筑的吊装调平机构与工作方法。
技术方案:为实现上述目的,本发明的装配式建筑的吊装调平机构,包括吊装机械臂,所述吊装机械臂的下侧通过若干连接梁固定连接有横梁支架,所述横梁支架的下方通过固定柱固定连接有水平的吊装平台,所述吊装平台的四个顶角处分别设置有四个滑轮安装槽,四个滑轮安装槽内分别转动安装有第一定滑轮、第二定滑轮、第三定滑轮和第四定滑轮;所述吊装平台上安装有悬挂物调平机构,所述悬挂物调平机构向四周引出有四根牵引绳,四根牵引绳分别为第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳;
所述第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳分别跨过第一定滑轮、第二定滑轮、第三定滑轮和第四定滑轮,第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳分别跨过第一定滑轮、第二定滑轮、第三定滑轮和第四定滑轮后分别形成第一悬挂绳、第二悬挂绳、第三悬挂绳和第四悬挂绳。
进一步的,还包括被吊装的水平建筑构件,所述水平建筑构件的上侧的四个顶角处被分别悬挂连接在第一悬挂绳、第二悬挂绳、第三悬挂绳和第四悬挂绳的末端。
进一步的,所述悬挂物调平机构包括吊装平台中心处设置有水平的中心齿轮,所述中心齿轮的轴线与所述吊装平台的几何中心重合;所述吊装平台的下方通过下支架固定安装有中心齿轮步进电机,所述中心齿轮步进电机通过主输出轴与所述中心齿轮驱动连接。
进一步的,所述中心齿轮的四周呈圆周阵列分布有四个行星齿轮单元,四所述行星齿轮单元均与中心齿轮啮合;四所述行星齿轮单元分别为第一行星齿轮单元、第二行星齿轮单元、第三行星齿轮单元和第四行星齿轮单元;
第一行星齿轮单元、第二行星齿轮单元、第三行星齿轮单元和第四行星齿轮单元的轴心处的轴承孔中分别转动设置有第一行星轮轴、第二行星轮轴、第三行星轮轴和第四行星轮轴;
所述横梁支架的中部下侧固定安装有向下延伸的中心固定轴,所述中心固定轴上通过四个离合器分别转动安装有第一摇臂、第二摇臂、第三摇臂和第四摇臂;各所述离合器均包括分离和锁止两个状态;四所述离合器均处于锁止状态时,第一摇臂、第二摇臂、第三摇臂和第四摇臂无法绕中心固定轴回转;第一摇臂、第二摇臂、第三摇臂和第四摇臂的末端轴承孔通过轴承分别转动连接第一行星轮轴、第二行星轮轴、第三行星轮轴和第四行星轮轴。
进一步的,第一行星齿轮单元、第二行星齿轮单元、第三行星齿轮单元和第四行星齿轮单元沿轴线方向的中部同轴心设置有环状的挠线沟槽,所述挠线沟槽的上下侧分别为上齿轮部和下齿轮部;
所述第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳的根部分别固定连接在第一行星齿轮单元的挠线沟槽的槽底上、第二行星齿轮单元的挠线沟槽的槽底上、第三行星齿轮单元的挠线沟槽的槽底上和第四行星齿轮单元的挠线沟槽的槽底上;所述第一行星齿轮单元、第二行星齿轮单元、第三行星齿轮单元和第四行星齿轮单元挠自身轴线旋转能使第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳卷绕在所对应的挠线沟槽中。
进一步的,所述中心齿轮的外周同轴心设置有上下分布的上环状齿条滑轨和下环状齿条滑轨;第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳水平穿过于上环状齿条滑轨与下环状齿条滑轨之间;
还包括第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条;所述第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条的弧形圆心角均为90°;在俯视的情况下,第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条构成一个整圆;
所述第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条的内部沿弧线方向设置有滑轨弧形穿过通道;所述第一弧形齿条和第三弧形齿条上的滑轨弧形穿过通道滑动套在下环状齿条滑轨上;所述第二弧形齿条和第四弧形齿条滑动套在上环状齿条滑轨上;所述第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条在下环状齿条滑轨和上环状齿条滑轨的约束下沿中心齿轮的轴心转动;
第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条的弧形内圈阵列有内齿体,第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条的弧形外圈阵列有外齿体;
所述第一弧形齿条和第三弧形齿条上的内齿体分别与第一行星齿轮单元的下齿轮部和第三行星齿轮单元的下齿轮部啮合;第二弧形齿条和第四弧形齿条上的内齿体分别与第二行星齿轮单元的上齿轮部和第四行星齿轮单元的上齿轮部啮合。
进一步的,所述吊装平台上还分别固定安装有第一电机支架、第二电机支架、第三电机支架和第四电机支架,所述第一电机支架、第二电机支架、第三电机支架和第四电机支架上分别固定安装有第一步进电机、第二步进电机、第三步进电机和第四步进电机;所述第一步进电机、第二步进电机、第三步进电机和第四步进电机的输出端分别为第一输出齿轮、第二输出齿轮、第三输出齿轮和第四输出齿轮;所述第一输出齿轮、第二输出齿轮、第三输出齿轮和第四输出齿轮;所述第一输出齿轮、第二输出齿轮、第三输出齿轮和第四输出齿轮分别啮合第一弧形齿条、第二弧形齿条、第三弧形齿条和第四弧形齿条的外齿体。
进一步的,所述吊装平台上还呈圆周阵列分布有四组牵引绳约束单元;
每一组牵引绳约束单元均包括固定在吊装平台上的第一竖向柱桩和第二竖向柱状,所述第一竖向柱桩和第二竖向柱状上分别活动套设有第一活动筒和第二活动筒;所述第一活动筒与第二活动筒之间形成牵引绳约束间隙;所述第一牵引绳、第二牵引绳、第三牵引绳和第四牵引绳分别水平穿过四所述牵引绳约束间隙。
有益效果:本发明的结构简单,能实现不改变姿态的基础上微调被悬挂物的高度;还能微调被悬挂物的姿态。
附图说明
附图1为本发明的整体结构正视图;
附图2为本发明的立体结构示意图;
附图3为本装置的剖视图;
附图4为吊装平台与悬挂物调平机构的俯视图结构;
附图5为附图4的立体示意图;
附图6为本装置的传动结构;
附图7为附图6的俯视图;
附图8为附图6的爆炸结构示意图;
附图9为单个行星齿轮卷绕牵引绳的结构示意图;
附图10为弧形齿条与环状齿条滑轨爆炸示意图。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如附图1至10所示的装配式建筑的吊装调平机构,包括吊装机械臂1,所述吊装机械臂1的下侧通过若干连接梁3固定连接有横梁支架4,所述横梁支架4的下方通过固定柱5固定连接有水平的吊装平台10,所述吊装平台10的四个顶角处分别设置有四个滑轮安装槽13,四个滑轮安装槽13内分别转动安装有第一定滑轮11.1、第二定滑轮11.2、第三定滑轮11.3和第四定滑轮11.4;所述吊装平台10上安装有悬挂物调平机构6,所述悬挂物调平机构6向四周引出有四根牵引绳,四根牵引绳分别为第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4;
所述第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4分别跨过第一定滑轮11.1、第二定滑轮11.2、第三定滑轮11.3和第四定滑轮11.4,第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4分别跨过第一定滑轮11.1、第二定滑轮11.2、第三定滑轮11.3和第四定滑轮11.4后分别形成第一悬挂绳12.1、第二悬挂绳12.2、第三悬挂绳12.3和第四悬挂绳12.4。
还包括被吊装的水平建筑构件7,所述水平建筑构件7的上侧的四个顶角处被分别悬挂连接在第一悬挂绳12.1、第二悬挂绳12.2、第三悬挂绳12.3和第四悬挂绳12.4的末端。
所述悬挂物调平机构6包括吊装平台10中心处设置有水平的中心齿轮19,所述中心齿轮19的轴线与所述吊装平台10的几何中心重合;所述吊装平台10的下方通过下支架8固定安装有中心齿轮步进电机9,所述中心齿轮步进电机9通过主输出轴21与所述中心齿轮19驱动连接。
所述中心齿轮19的四周呈圆周阵列分布有四个行星齿轮单元,四所述行星齿轮单元均与中心齿轮19啮合;四所述行星齿轮单元分别为第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4;
第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4的轴心处的轴承孔26中分别转动设置有第一行星轮轴80.1、第二行星轮轴80.2、第三行星轮轴80.3和第四行星轮轴80.4;
所述横梁支架4的中部下侧固定安装有向下延伸的中心固定轴95,所述中心固定轴95上通过四个离合器96分别转动安装有第一摇臂70.1、第二摇臂70.2、第三摇臂70.3和第四摇臂70.4;各所述离合器96均包括分离和锁止两个状态;四所述离合器96均处于锁止状态时,第一摇臂70.1、第二摇臂70.2、第三摇臂70.3和第四摇臂70.4无法绕中心固定轴95回转;第一摇臂70.1、第二摇臂70.2、第三摇臂70.3和第四摇臂70.4的末端轴承孔通过轴承分别转动连接第一行星轮轴80.1、第二行星轮轴80.2、第三行星轮轴80.3和第四行星轮轴80.4。
第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4沿轴线方向的中部同轴心设置有环状的挠线沟槽29,所述挠线沟槽29的上下侧分别为上齿轮部25和下齿轮部27;
所述第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4的根部分别固定连接在第一行星齿轮单元22.1的挠线沟槽29的槽底28上、第二行星齿轮单元22.2的挠线沟槽29的槽底28上、第三行星齿轮单元22.3的挠线沟槽29的槽底28上和第四行星齿轮单元22.4的挠线沟槽29的槽底28上;所述第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4挠自身轴线旋转能使第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4卷绕在所对应的挠线沟槽29中。
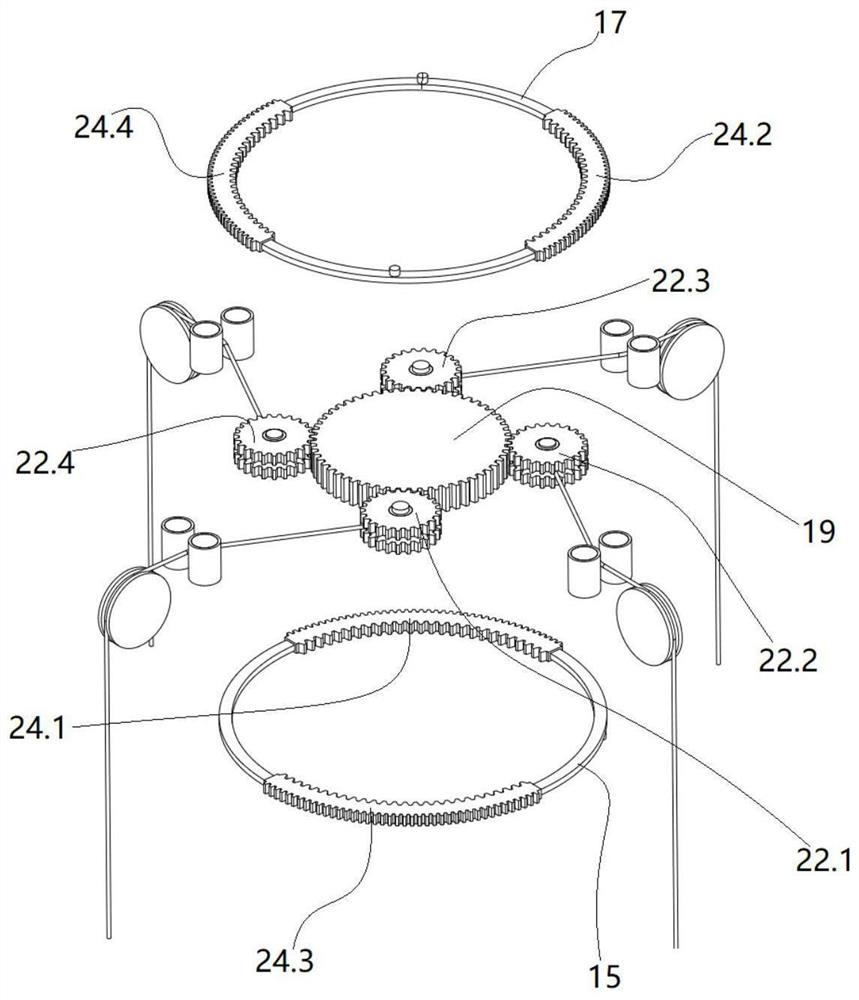
所述中心齿轮19的外周同轴心设置有上下分布的上环状齿条滑轨17和下环状齿条滑轨15;第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4水平穿过于上环状齿条滑轨17与下环状齿条滑轨15之间;
还包括第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4;所述第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的弧形圆心角均为90°;在俯视的情况下,第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4构成一个整圆;
所述第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的内部沿弧线方向设置有滑轨弧形穿过通道50;所述第一弧形齿条24.1和第三弧形齿条24.3上的滑轨弧形穿过通道50滑动套在下环状齿条滑轨15上;所述第二弧形齿条24.2和第四弧形齿条24.4滑动套在上环状齿条滑轨17上;所述第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4在下环状齿条滑轨15和上环状齿条滑轨17的约束下沿中心齿轮19的轴心转动;
第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的弧形内圈阵列有内齿体02,第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的弧形外圈阵列有外齿体01;
所述第一弧形齿条24.1和第三弧形齿条24.3上的内齿体02分别与第一行星齿轮单元22.1的下齿轮部27和第三行星齿轮单元22.3的下齿轮部27啮合;第二弧形齿条24.2和第四弧形齿条24.4上的内齿体02分别与第二行星齿轮单元22.2的上齿轮部25和第四行星齿轮单元22.4的上齿轮部25啮合。
所述吊装平台10上还分别固定安装有第一电机支架92.1、第二电机支架92.2、第三电机支架92.3和第四电机支架92.4,所述第一电机支架92.1、第二电机支架92.2、第三电机支架92.3和第四电机支架92.4上分别固定安装有第一步进电机91.1、第二步进电机91.2、第三步进电机91.3和第四步进电机91.4;所述第一步进电机91.1、第二步进电机91.2、第三步进电机91.3和第四步进电机91.4的输出端分别为第一输出齿轮90.1、第二输出齿轮90.2、第三输出齿轮90.3和第四输出齿轮90.4;所述第一输出齿轮90.1、第二输出齿轮90.2、第三输出齿轮90.3和第四输出齿轮90.4;所述第一输出齿轮90.1、第二输出齿轮90.2、第三输出齿轮90.3和第四输出齿轮90.4分别啮合第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的外齿体01。
所述吊装平台10上还呈圆周阵列分布有四组牵引绳约束单元14;
每一组牵引绳约束单元14均包括固定在吊装平台10上的第一竖向柱桩32和第二竖向柱状34,所述第一竖向柱桩32和第二竖向柱状34上分别活动套设有第一活动筒31和第二活动筒30;所述第一活动筒31与第二活动筒30之间形成牵引绳约束间隙33;所述第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4分别水平穿过四所述牵引绳约束间隙33。
本方案的装配式建筑的吊装调平机构的姿态微调方法和工作原理如下:
被吊装的水平建筑构件7的高度微调过程:
控制第一步进电机91.1、第二步进电机91.2、第三步进电机91.3和第四步进电机91.4解除刹车状态,从而使第一输出齿轮90.1、第二输出齿轮90.2、第三输出齿轮90.3和第四输出齿轮90.4处于能自由旋转的状态,进而解除了对第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4的约束;与此同时控制四个离合器96全部处于锁止状态,这时第一摇臂70.1、第二摇臂70.2、第三摇臂70.3和第四摇臂70.4在四个离合器96的锁止作用下无法绕中心固定轴95回转,从而使第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4的轴线均被固定;这时控制中心齿轮步进电机9旋转,使中心齿轮19缓慢旋转,中心齿轮19的旋转在啮合传动下使第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4做严格的等转速自转,第一弧形齿条24.1、第二弧形齿条24.2、第三弧形齿条24.3和第四弧形齿条24.4适应性的绕轴线回转一定角度;从而使第一牵引绳23.1、第二牵引绳23.2、第三牵引绳23.3和第四牵引绳23.4严格等量的卷绕在第一行星齿轮单元22.1、第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4上的挠线沟槽29中,进而实现同步缩短第一悬挂绳12.1、第二悬挂绳12.2、第三悬挂绳12.3和第四悬挂绳12.4,最终使被悬挂的被吊装的水平建筑构件7缓慢上升,若要让被悬挂的被吊装的水平建筑构件7缓慢下降只需正在上述基础上控制中心齿轮19反转即可;从而实现了不改变姿态的基础上微调被悬挂物的高度;
被吊装的水平建筑构件7的姿态微调过程:
假设被吊装的水平建筑构件7的第一悬挂绳12.1下方稍微有一点偏低,这时需要单独的将第一悬挂绳12.1向上拉动一小段距离,从而实现调平的作用,这时先控制中心齿轮步进电机9刹车制动,从而让中心齿轮19处于无法旋转的固定状态;然后让第二摇臂70.2、第三摇臂70.3和第四摇臂70.4的所对应的离合器96处于锁止的状态;从而使第二行星齿轮单元22.2、第三行星齿轮单元22.3和第四行星齿轮单元22.4不能沿中心齿轮19周转,也不能沿自身轴线自转;与此同时将第一摇臂70.1所对应的离合器96由锁止状态调节至分离状态;这时只有第一摇臂70.1能沿中心固定轴95自由回转;这时控制第一步进电机91.1,让第一输出齿轮90.1带动第一弧形齿条24.1沿下环状齿条滑轨15的弧形滑轨方向滑动,第一弧形齿条24.1沿下环状齿条滑轨15的弧形滑轨方向滑动会在内齿体02的啮合的作用下单独带动第一行星齿轮单元22.1,使第一行星齿轮单元22.1在沿自身自转的同时还沿中心齿轮19周转,进而使第一行星齿轮单元22.1上的挠线沟槽29单独卷绕第一牵引绳23.1的过程中,第一行星齿轮单元22.1的自身位置也在变化,最终的效果是:第一悬挂绳12.1向上拉动一小段距离,从而实现调平的作用。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 装配式建筑的吊装调平机构与工作方法
- 用于装配式建筑构件的吊装机构与工作方法