一种运动鞋智能刷胶装置
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及运动鞋刷胶装置技术领域,尤其涉及一种运动鞋智能刷胶装置。
背景技术
运动鞋为日常生活中常见的一类鞋,在运动鞋的生产中鞋底刷胶为很重要也很关键的一步,但现在生产运动鞋时刷胶大部分都为人工刷胶,人工刷胶不仅效率缓慢而且刷胶的均匀性得不到保障,直接影响鞋成品的质量,费时费力,鉴于此,我们提出了一种运动鞋智能刷胶装置。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种运动鞋智能刷胶装置。
为了实现上述目的,本发明采用了如下技术方案:
一种运动鞋智能刷胶装置,包括电动伸缩杆、传送带和储胶槽,所述电动伸缩杆竖直设置在传送带的上方,所述电动伸缩杆的下端安装有压力传感器,所述压力传感器的下端固定连接有安装块,所述安装块的下端固定连接有水平状的储胶盒,所述储胶盒的内部转动安装有转动辊,所述转动辊的上端与储胶盒内部的空腔相接触,转动辊的下端延伸至储胶盒的外侧,转动辊的辊体上设置有刷毛,所述储胶盒下端面上嵌入安装有激光测距仪,所述储胶槽的下端通过第一连接管与储胶盒相连接。
优选的,所述储胶盒下端面的两侧设置有倾斜部,所述激光测距仪安装在其中一个倾斜部。
优选的,所述激光测距仪所在倾斜部的上端还安装有喷嘴,所述喷嘴的开口朝向激光测距仪,所述喷嘴通过第三连接管与压缩空气储罐相连接。
优选的,所述激光测距仪所在倾斜部的下端还安装有挡板,所述挡板与倾斜部相垂直,且激光测距仪的光路不经过挡板。
优选的,所述挡板靠近激光测距仪的一侧与倾斜部的连接处设置有圆弧形的过渡段。
优选的,所述储胶盒沿传送带的宽度方向设置,且储胶盒的侧壁上安装有电动机,电动机的输出轴与转动辊相连接。
本发明的有益效果是:
1、该刷胶装置使用时,由于鞋底通常是前低后高,通过激光测距仪获取储胶盒与鞋底之间的距离,从而调节电动伸缩杆的上升或者下降,使得转动辊始终与鞋底保持合适的距离,安装块与电动伸缩杆之间设置有压力传感器,设定压力传感器测量值的最大值和最小值,来进行一步的对电动伸缩杆进行限制,使得转动辊的位置更加精准,涂胶更加的均匀。
2、通过喷嘴对激光测距仪附近进行吹扫,避免了胶水粘附在激光测距仪附近,保证激光测距仪测量的准确性,且通过挡板对喷嘴喷出的气流进行导向,使得气流吹向待涂胶的鞋底,对待涂胶的鞋底进行除尘,有利于提高后续涂胶的效果。
附图说明
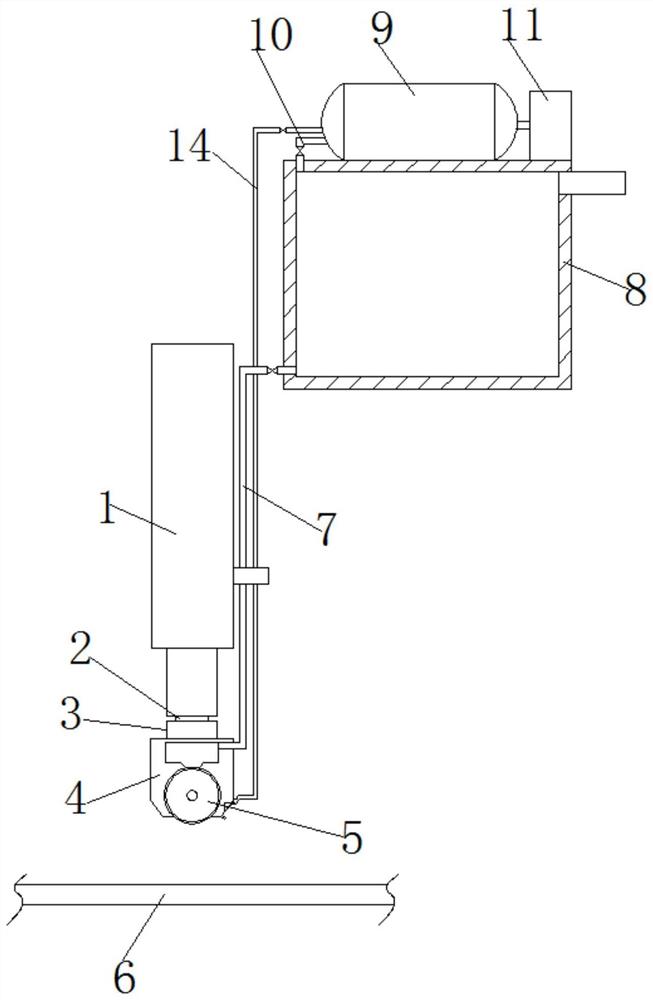
图1为本发明提出的一种运动鞋智能刷胶装置的主视结构示意图;
图2为本发明提出的一种运动鞋智能刷胶装置的储胶盒的主视结构示意图;
图3为本发明提出的一种运动鞋智能刷胶装置的图2中A处放大结构示意图。
图中:1电动伸缩杆、2压力传感器、3安装块、4储胶盒、5转动辊、6传送带、7第一连接管、8储胶槽、9压缩空气储罐、10第二连接管、11空气压缩机、12激光测距仪、13喷嘴、14第三连接管、15挡板、16刷毛。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例1中,参照图1-3,一种运动鞋智能刷胶装置,包括电动伸缩杆1、传送带6和储胶槽8,所述电动伸缩杆1竖直设置在传送带6的上方,所述电动伸缩杆1的下端安装有压力传感器2,所述压力传感器2的下端固定连接有安装块3,所述安装块3的下端固定连接有水平状的储胶盒4,所述储胶盒4的内部转动安装有转动辊5,所述转动辊5的上端与储胶盒4内部的空腔相接触,转动辊5的下端延伸至储胶盒4的外侧,转动辊5的辊体上设置有刷毛16,所述储胶盒4下端面上嵌入安装有激光测距仪12,所述储胶槽8的下端通过第一连接管7与储胶盒4相连接。
进一步的,储胶盒4下端面的两侧设置有倾斜部,所述激光测距仪12安装在其中一个倾斜部,倾斜部能够有效的减少胶水的粘附。
进一步的,激光测距仪12所在倾斜部的上端还安装有喷嘴13,所述喷嘴13的开口朝向激光测距仪12,所述喷嘴13通过第三连接管14与压缩空气储罐9相连接,第一连接管7和第三连接管14均为橡胶软管,电动伸缩杆1的杆体上固定设置有套环,第一连接管7和第三连接管14穿过套环,套环对第一连接管7和第三连接管14起到收纳作用。
进一步的,激光测距仪12所在倾斜部的下端还安装有挡板15,所述挡板15与倾斜部相垂直,且激光测距仪12的光路不经过挡板15。
进一步的,挡板15靠近激光测距仪12的一侧与倾斜部的连接处设置有圆弧形的过渡段,该过渡段能够有效的减少气体流动时能量的损失。
进一步的,储胶盒4沿传送带6的宽度方向设置,且储胶盒4的侧壁上安装有电动机,电动机的输出轴与转动辊5相连接,通过电动机能够带动转动辊5转动。
该刷胶装置使用时,由于鞋底通常是前低后高,通过激光测距仪12获取储胶盒4与鞋底之间的距离,从而调节电动伸缩杆1的上升或者下降,操作前可以对激光测距仪12的测量值进行设定,如保证激光测距仪12与鞋底之间的距离保持在10-12mm,激光测距仪12测量值变大时,电动伸缩杆1向下运动,激光测距仪12测量值变小时,电动伸缩杆1向上运动,使得转动辊5始终与鞋底保持合适的距离,刷毛16能够正常的涂胶,安装块3与电动伸缩杆1之间设置有压力传感器2,设定压力传感器2测量值的最大值和最小值,来进行一步的对电动伸缩杆1进行限制,即压力传感器2是对激光测距仪12控制的一个补充,当激光测距仪12测量值变小电动伸缩杆1向上运动时,压力传感器2测量值达到最小值时,电动伸缩杆1停止向上运动,当激光测距仪12测量值变大电动伸缩杆1向下运动时,压力传感器2测量值达到最大值时,电动伸缩杆1停止向下运动,使得转动辊5的位置更加精准,涂胶更加的均匀。
通过喷嘴13对激光测距仪12附近进行吹扫,避免了胶水粘附在激光测距仪12附近,保证激光测距仪12测量的准确性,且通过挡板15对喷嘴13喷出的气流进行导向,使得气流吹向待涂胶的鞋底,对待涂胶的鞋底进行除尘,有利于提高后续涂胶的效果。
实施例2中,装置内还设置有空气压缩机11,空气压缩机11的出口端与压缩空气储罐9相连接,压缩空气储罐9还通过第二连接管10与储胶槽8相连接,储胶槽8整体密封性良好,且储胶槽8上还还设置有压力表,通过第二连接管10向储胶槽8内注入压缩空气,能够使得胶水方便的进入储胶盒4。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种运动鞋智能刷胶装置
- 一种工业机器人用浮动刷胶装置及刷胶方法