一种L3级以下自动驾驶的可接管转向盘装置
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及一种车辆转向盘装置,特别是涉及一种L3级以下自动驾驶的可接管转向盘装置。
背景技术
目前多数的交通事故都是由于驾驶员分心以及误操作导致,而自动驾驶可以提高驾驶的安全性,改善交通效率和节省司机成本。各国都在做自动驾驶汽车的研发,自动驾驶技术还没有完全成熟。目前市面上已有的自动驾驶汽车还处于L3级以下,无法完全脱离驾驶员的监管。汽车处于自动驾驶状态,如果遇到突发状况时,需要驾驶员及时接管转向盘时,自动驾驶模式应该能自动终止。在自动驾驶系统的相关标准中也要求通过人工转动转向盘时可及时接管操作。
发明内容
针对上述现有技术缺陷,本发明的任务在于提供一种L3级以下自动驾驶的可接管转向盘装置,在需要人工干预接管自动驾驶时,实现转动转向盘退出自动驾驶模式。
本发明技术方案是这样的:一种L3级以下自动驾驶的可接管转向盘装置,包括转向盘、上转向柱、转向感应部件、下转向柱、转向电机、拨动控制开关,所述转向盘与所述上转向柱刚性连接,所述转向电机用于驱动所述下转向柱转动,所述拨动控制开关用于控制所述转向电机的供电电路通断,所述转向感应部件包括第一转向柱和第二转向柱,所述第一转向柱与所述第二转向柱为转动连接,所述第二转向柱设有液压腔体,所述液压腔内设有第一活塞和第二活塞,所述第一活塞与所述第一转向柱连接,所述上转向柱与所述第一转向柱刚性连接,所述下转向柱与所述第二转向柱刚性连接,所述第二活塞的活塞杆用于驱动所述拨动控制开关,所述第二活塞与所述第二转向柱间连接第一弹性件,所述第一转向柱与所述第二转向柱相对转动时所述第一活塞在所述液压腔内移动且通过所述液压腔内的油液驱动所述第二活塞移动,所述第一弹性件的弹力能克服所述转向盘、所述上转向柱和所述第一转向柱的转动惯量。
本发明在自动驾驶状态时,转向电机驱动下转向柱转动,下转向柱带动第二转向柱转动,由于转向盘、上转向柱以及第一转向柱具有较小的惯量较小,因此第一弹性件不变形,第二活塞及第一活塞位置不变,进而带动第一转向柱、上转向柱及转向盘随动。当人为干预转向盘时,对转向盘施加额外力矩,此时克服第一弹性件的弹力,第一活塞推动油液进而推动第二活塞移动,从而驱动拨动控制开关动作断开转向电机的供电电路,驾驶状态由自动改为手动。
进一步地,为了提高对转向盘微小转动的过滤性,所述第一转向柱通过第二弹性件与所述第一活塞连接。
进一步地,所述第一转向柱设有撞击头,所述液压腔包括相连通的第一液压腔和第二液压腔,所述第一活塞设置于所述第一液压腔,所述第二活塞设置于所述第二液压腔,所述第一液压腔是以所述撞击头转动路径为轴线的具有缺口的环形腔。
进一步地,为了提高对转向盘转向的响应能力,放大转向驱动,所述第二液压腔的截面小于所述第一液压腔截面。
进一步地,所述撞击头设有两个,所述第一活塞设有两个,所述撞击头设置于所述环形腔的缺口位置。
进一步地,所述第一弹性件为拉簧,所述第二转向柱连接固定拉杆,所述第二活塞杆连接随动拉杆,所述拉簧一端与所述固定拉杆连接,所述拉簧的另一端与所述随动拉杆连接。
本发明与现有技术相比的优点在于:利用转向盘的转动驱动液压油带动活塞移动,采用机械方式触发转向电机电路通断的开关,可靠性较好且能够过滤细小的转向盘转动干扰。
附图说明
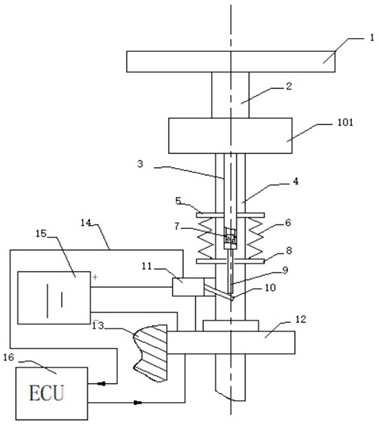
图1为L3级以下自动驾驶的可接管转向盘装置结构正视示意图。
图2为L3级以下自动驾驶的可接管转向盘装置结构后视示意图。
图3为图2的A-A剖面图。
具体实施方式
下面结合实施例对本发明作进一步说明,但不作为对本发明的限定。
请结合图1至图3所示,本实施例涉及的一种L3级以下自动驾驶的可接管转向盘装置包括转向盘1、上转向柱2、转向感应部件101、下转向柱4、转向电机12以及拨动控制开关11,转向盘1与上转向柱2刚性连接,转向电机12与车身13固定用于驱动下转向柱4转动,转向感应部件101连接于上转向柱2和下转向柱4之间。
转向感应部件101包括第一转向柱27和第二转向柱25,第一转向柱27和第二转向柱25均套设在柱头连接轴21上为转动连接,第一转向柱27和第二转向柱25可以相对小角度转动。上转向柱2与第一转向柱27刚性连接,下转向柱4与第二转向柱25刚性连接。第一转向柱27的侧面设置了两个撞击头,分别为左撞击头20和右撞击头19。在第二转向柱25上设置一个液压腔体,该液压腔体由两部分构成,一部分是以撞击头转动路径为轴线的具有缺口的环形腔作为第一液压腔26,另一部分是与第一液压腔26导通的沿着下转向柱4轴向方向延伸的第二液压腔3。第一液压腔26的环形缺口位置处于第一转向柱27的左撞击头20和右撞击头19位置。在第一液压腔26的缺口端分别设置了第一活塞即左弧形活塞23和右弧形活塞22,分别与左撞击头20和右撞击头19对应,在左弧形活塞23朝向左撞击头20的一侧设置左锥形弹簧18,在右弧形活塞22朝向右撞击头19的一侧设置右锥形弹簧17,左锥形弹簧18和右锥形弹簧17作为第二弹性件,在本实施例中,左撞击头20与左锥形弹簧18以及右撞击头19与右锥形弹簧17都不连接但紧密接触,在其他实施例中也可以将左撞击头20与左锥形弹簧18以及右撞击头19与右锥形弹簧17相互连接,在撞击头与锥形弹簧不连接时,转向盘1的转动只需要克服一侧的锥形弹簧即可推动弧形活塞动作,在撞击头与锥形弹簧连接时,转向盘1的转动则需要克服两侧的锥形弹簧才可推动弧形活塞动作,对于转向盘1的误触或者自身转动的过滤性更强。
第二液压腔3的截面小于第一液压腔截面26,在第二液压腔3内设置第二活塞7,这样第一活塞即左弧形活塞23和右弧形活塞22在第一液压腔26内的小幅度移动可以驱动第二活塞7在第二液压腔3内进行大幅度移动以放大转向盘1的转向驱动。第二转向柱25连接固定拉杆5,第二活塞7的活塞杆9连接随动拉杆8,拉簧6作为第一弹性件,其一端与固定拉杆5连接,拉簧6的另一端与随动拉杆8连接。拉簧6的弹力应能克服转向盘1、上转向柱2和第一转向柱27的转动惯量,即当转向电机12驱动下转向柱4及第二转向柱25转动时应确保拉簧6不被拉伸时能通过第一液压腔26及第二液压腔3的油液驱动第一转向柱27带动上转向柱2及转向盘1转动。第二活塞7的活塞杆9向下延伸并与拨动控制开关11的拨片10抵触,当第二活塞7下移时可以使拨动控制开关11动作,而第二活塞7上移时,第二活塞7的活塞杆9与拨片10分离,拨动控制开关11保持其状态。拨动控制开关11用于控制转向电机12的供电电路通断,同时车辆ECU 16与转向电机12的通讯电路也由拨动控制开关11控制,当拨动控制开关11的拨片10被第二活塞7的活塞杆9向下拨动时,转向电机12的供电及与ECU 16的通讯电路被断开,也就断开了自动驾驶模式。
当遇到紧急情况需要接管转向系统时,驾驶员以一定的手力转动转向盘1,与转向盘刚性连接的上转向柱2转动,带动与第一转向柱27的左撞击头20或右撞击头19旋转,撞击头撞击锥形弹簧克服预紧力后撞击左弧形活塞23或右弧形活塞22,推动其在第一液压腔内移动使液压油24进入第二液压腔3,第二液压腔3的截面积远小于第一液压腔26的截面积,从而推动第二活塞7并带动活塞杆9向下运动,推动拨片10关闭拨动控制开关11,转向电机12的供电电源被切断,ECU16识别拨动控制开关11的信号关闭,停止发送控制转向电机12旋转的信号。
当驾驶员需要继续自动驾驶时,没有手力作用在转向盘1上,也没有液压力作用在第二活塞7上,第二活塞7在拉簧6的作用下,随动拉杆8被拉向固定拉杆5,第二活塞7、左弧形活塞23及右弧形活塞22同时复位。驾驶员手动向上拨动拨片10,转向电机12的供电电源接通,ECU 16识别拨动控制开关11的信号打开,开始发送控制转向电机12旋转的信号。
- 一种L3级以下自动驾驶的可接管转向盘装置
- 一种基于L3级自动驾驶的车辆接管控制方法及系统