一种飞机缸体检测机
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及航空领域,尤其涉及一种飞机缸体检测机。
背景技术
飞机作为重要的交通运输工具,广泛应用于民用、军事等领域;作为高空飞行工具,飞机零部件需要具有可靠的稳定性,发动机作为飞机正常飞行的重要零部件,需要定期全面的检测和分析,目前常规手持式专用量规检测方式需要人工肉眼寻找缺陷点并专业量规测量,测试范围有限且精度较差,并且检测效率低,对操作工的专业技能要求高部分边角位置容易遗漏检测;另外人员检测过程中容易损坏发动机或容易产生检测人员磕碰受伤。
发明内容
为了解决上述技术问题,本发明涉及一种飞机缸体检测机,包括底座、与底座背侧上下活动连接的检测单元、设置于底座内部的控制主机,所述检测单元包括环形导轨、相对环形导轨圆周转动的检测相机,所述环形导轨固定于一环形导轨固定板,导轨固定板与底座上下滑动连接;所述检测相机固定于一轴向滑动机构的一端并可相对环形导轨做轴向移动,所述轴向滑动机构连接于一径向滑动机构并可相对环形导轨做径向移动,所述径向滑动机构通过固定板和固定板上的导向轮与环形导轨的外圆周环绕转动连接;本飞机缸体检测机的检测单元不仅能整体上下移动,而且内部的检测相机可相对飞机缸体做圆周、径向、轴向移动,使检测相机能全面快速的完成拍照检测,检测精度和自动化程度高。
本发明的技术方案如下:
一种飞机缸体检测机,包括底座、与底座背侧上下活动连接的检测单元、设置于底座内部的控制主机,所述检测单元包括环形导轨、相对环形导轨圆周转动的检测相机,所述环形导轨固定于一环形导轨固定板,所述导轨固定板与底座升降配合;所述检测相机固定于一轴向滑动机构的一端并可相对环形导轨做轴向移动,所述轴向滑动机构连接于一径向滑动机构并可相对环形导轨做径向移动,所述径向滑动机构可在控制主机控制下沿环形导轨做圆周运动。
所述径向滑动机构通过一固定板和固定板上的可主动转动的导向轮沿环形导轨的外圆周移动;所述控制主机还控制所述检测相机的拍摄;所述控制主机的操作指令通过一操控单元输入;所述检测相机为激光三角D相机,检测相机的侧面设置有一位置传感器。
其中,所述环形导轨包括轴向相连的环形导向部和环形传动部,所述导向部的半径大于传动部;所述传动部外圆周端设置有一圈传动齿,所述导向部的内、外圆周端的径向截面为三角形;所述固定板远离环形导轨一端设置有第一电机,所述第一电机轴伸端穿过所述固定板并通过一齿轮与环形导轨的传动部齿轮连接;所述导向轮设置于固定板的四角,导向轮外圆周表面中部设置有一圈的三角形挖槽,所述导向轮通过挖槽卡于所述导向部的内、外圆周端。
其中,所述径向滑动机构包括设置于轴向滑动机构下端的一T形滑座,所述滑座包括水平的支撑板和与支撑板中部垂直连接的连接板,所述连接板与固定板在竖直方向上互相平行,所述滑座在支撑板和连接板的连接处设置有一与支撑板、连接板垂直的加强筋,所述支撑板、连接板和加强筋一体成形;所述固定板在远离环形导轨端的中上部设置有一竖直第一滑轨,所述连接板在靠近固定板一端设置有第一滑块,所述连接板通过所述第一滑块与所述固定板上的第一滑轨上下滑动连接;所述连接板在与固定板垂直的侧端设置有一竖直的第一齿条,所述固定板上固定设置有一第二电机,所述第二电机的轴伸端通过一齿轮与所述第一齿条齿轮连接。
其中,所述轴向滑动机构包括支撑板顶端设置的与环形导轨轴向平行的第二滑块,所述第二滑块上端设置有一与其滑动连接的第二滑轨,所述检测相机固定连接于所述第二滑轨靠近环形导轨的一端;所述第二滑轨顶端设置有一第二齿条,所述支撑板侧端固定设置有一第三电机,所述第三电机的轴伸端通过一齿轮与所述第二齿条齿轮连接。
其中,所述底座包括设置于底部的脚轮、水平承托的底架、竖直支撑检测单元的支架、包裹底架和支架的底座钣金,所述支架在与环形导轨轴向相垂直的侧端设置有一组竖直的第三滑轨,所述导轨固定板下端设置有与所述第三滑轨对应的第三滑块,所述检测单元通过所述导轨固定板上的第三滑块与所述支架上的第三滑轨上下滑动连接;所述导轨固定板的下端中部设置有一L形连接座,所述连接座的竖直端与所述导轨固定板固定连接,所述底架在导轨固定板的下方设置有一竖直升降机,所述升降机的活动升降端竖直朝上,所述连接座的水平端向下抵扣于所述升降机的活动端;所述升降机由一第四电机驱动。
其中,所述操控单元包括底座正/背面端设置的键盘、触摸屏、物理按键等,所述键盘、触摸屏、物理按键与所述控制主机电连接;所述检测机的检测数据和运行状态显示于底座正面的显示器和指示灯上;所述键盘通过一伸缩托盘活动隐藏于所述底座内;所述物理按键包括底座正面端的启动按钮和底座背面端的升降按钮、急停按钮,所述升降按钮控制所述升降机的上下移动;所述底座的侧面设置有排气用百叶窗,底座的背面底端设置有多个排气扇。
其中,所述导轨固定板在远离飞机缸体一端设置有一柱形钣金外罩,所述钣金外罩在底座正面端开设有一透明观察窗;所述导轨固定板在靠近飞机缸体一端设置有一防尘盖板,所述防尘盖板的直径大于所述导轨固定板的环形开口直径。
其中,所述导轨固定板在靠近飞机缸体一端设置有一弧形定位机构,所述弧形定位机构包括与导轨固定板固定连接的弧形定位块,所述定位块的弧形圆心与所述导轨固定板的环形圆心重合;所述定位块两端分别固定设置有一定位螺栓,所述两定位螺栓在同一圆周上且圆心与导轨固定板的环形圆心重合;所述定位块外滑动侧套接有一同心的弧形定位导槽,所述定位导槽在定位螺栓处设置有一与导轨固定板的环形圆心同心的开槽,所述定位导槽近圆心的弧形半径等于飞机缸体的外圆周半径。
一种飞机缸体检测机的工作方法,包括以下依序进行的步骤:
①将飞机缸体检测机移动至待检飞机缸体的前端,所述导轨固定板远离环形导轨的一端朝向待检飞机缸体的开口端,随后将防尘盖板打开;然后通过操控单元将检测单元所需的高度输入检测机,控制主机接收到命令后控制升降机运转,检测单元在升降机的带动下移动到所需的测试高度;操作员通过弧形定位机构确认发动机缸体与导轨固定板是否对准,如有偏差可通过升降按钮控制第四电机的正反转,从而控制升降机带动所述检测单元上下移动;当待检飞机缸体的转轴与所述环形导轨的轴线重合时,将导轨固定板与飞机缸体紧贴在一起;此时弧形定位机构紧贴飞机缸体的外表面,提高了飞机缸体与导轨固定板对接的精度;
②通过操控单元设置检测单元的检测起点、检测行程、工作距离等,然后按下启动按钮,控制主机控制检测单元开始对位与校准;
③控制主机控制第三电机转动,轴向滑动机构由第三电机带动,检测相机通过第二滑块和第二滑轨轴向移动至飞机缸体检测的起始点,此时检测相机位于飞机缸体的边缘;
④控制主机控制第二电机转动,径向滑动机构由第二电机带动,检测相机通过第一滑块和第一滑轨径向移动至所需拍照的位置,此时飞机缸体的内圆周表面的成像最清晰;
⑤检测单元在控制主机的控制下开始自动检测,首先检测相机在第一电机的带动下,环绕飞机缸体的内表面完成一圆周的拍照;随后轴向滑动机构将检测相机移动至下一检测区域,然后第一电机带动检测相机完成一圆周的拍照,重复以上动作直至检测相机完成飞机缸体内圆周表面的检测;
⑥拍照完成后通过控制主机和内设的程序将图像合成为三维图形,操作员通过操控单元完成三维图的分析和确认。
本发明具有如下有益效果:
1、本发明的检测单元不仅能整体上下移动,而且内部的检测相机在第一~四电机带动下可相对飞机缸体做圆周、径向、轴向移动,使检测相机能全面快速的完成飞机缸体内圆周表面的拍照检测,检测精度和自动化程度高。
2、本发明导向轮外圆周表面中部设置有一圈的三角形挖槽,导向轮通过挖槽卡于环形导轨导向部的内、外圆周端,此滚动连接方式稳固可靠,能避免导向轮脱出导向部;导向部的半径大于传动部,传动部内缩为导向轮转动提供了空间。
3、本发明检测相机、第一电机、第二电机、第三电机、第四电机由控制主机控制,控制主机由操控单元输入控制命令,自动化程度高,可避免人员操作导致的设备损坏。
4、本发明检测相机为激光三角3D相机,拍照精度高;检测相机的工作距离小,可避免检测相机与飞机缸体内部的凸出部件磕碰,增大了检测相机的移动空间;检测相机侧面设置的位置传感器能识别检测相机与发动机缸体的距离,避免检测相机与发动机缸体相撞,提高了检测相机的使用寿命。
5、本发明滑座的支撑板、连接板和加强筋一体成形,结构强度高,其中加强筋提高了支撑板和水平板连接的稳固性;T形滑座通过连接板上的第一滑块和支撑板上的第二滑块将轴向滑动机构、径向滑动机构、固定板连接在一起,使检测相机有多向移动能力,且连接结构占用空间小。
6、本发明脚轮为带刹车的万向轮,方便检测机的移动与固定;底架与支架为高强度钢架结构,抗变形能力和稳定性好。
7、本发明升降按钮、急停按钮设置于底座背面端,便于飞机缸体对位时人员的操作;排气扇设置于底座底端,排气时风流自上而下,使异物颗粒能顺着风流往下掉落,避免扰流使设备内环境恶化。
8、本发明导轨固定板在远离飞机缸体一端设置有一柱形钣金外罩,导轨固定板在靠近飞机缸体一端设置有一防尘盖板,此密封设计保证了设备的洁净度,避免检测相机镜头受污染,影响检测精度;钣金外罩在底座正面端开设有一透明观察窗,便于操作人员实时观察设备运作情况。
9、本发明定位导槽近圆心的弧形半径等于飞机缸体的外圆周半径,当飞机缸体靠近环形导轨固定板时,定位导槽能保证飞机缸体与导轨固定板吻合对接,避免缸体和环形导轨产生偏心,从而影响检测时间或检测的准确率。
附图说明
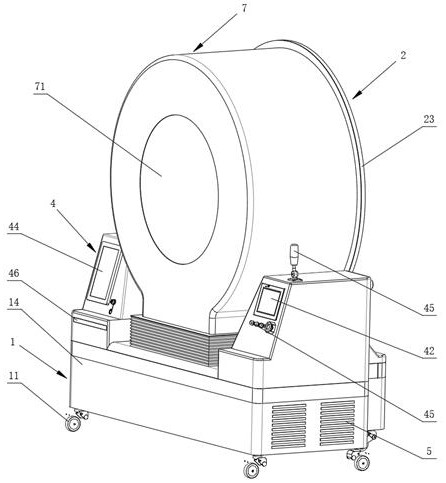
图1为本发明的示意图;
图2为本发明的正视图;
图3为本发明的背面视图;
图4为本发明的透视图;
图5为本发明图4圆圈位置放大图;
图6为本发明导向轮位置局部视图;
图7为本发明径向滑动机构和轴向滑动机构位置局部视图;
图8为本发明升降机与支架位置局部视图;
图9为本发明滑座示意图;
图10为本发明弧形定位机构示意图;
图11为本发明定位导槽示意图。
图中附图标记表示为:
1-底座、11-脚轮、12-底架、13-支架、14-底座钣金、15-第三滑轨、16-第三滑块、17-连接座、18-升降机、19-第四电机、
2-检测单元、21-环形导轨、211-导向部、212-传动部、22-检测相机、23-导轨固定板、24-轴向滑动机构、241-第二滑块、242-第二滑轨、243-第二齿条、244-第三电机、25-径向滑动机构、251-滑座、2511-支撑板、2512-连接板、2513-加强筋、252-第一滑轨、253-第一滑块、254-第一齿条、255-第二电机、26-固定板、27-导向轮、271-挖槽、28-位置传感器、29-第一电机、
3-控制主机、4-操控单元、41-键盘、42-触摸屏、43-物理按键、431-启动按钮、432-升降按钮、433-急停按钮、44-显示器、45-指示灯、46-伸缩托盘、
5-百叶窗、6-排气扇、7-钣金外罩、71-观察窗、8-防尘盖板、9-弧形定位机构、91-定位块、92-定位螺栓、93-定位导槽、931-开槽。
具体实施方式
下面结合附图和具体实施例来对本发明进行详细的说明。
参见图1至11,一种飞机缸体检测机,包括底座1、与底座1背侧上下活动连接的检测单元2、设置于底座1内部的控制主机3,所述检测单元2包括环形导轨21、相对环形导轨21圆周转动的检测相机22,所述环形导轨21固定于一环形导轨固定板23,所述导轨固定板23与底座1升降配合;所述检测相机22固定于一轴向滑动机构24的一端并可相对环形导轨21做轴向移动,所述轴向滑动机构24连接于一径向滑动机构25并可相对环形导轨21做径向移动,所述径向滑动机构25通过一固定板26和固定板26上的导向轮27与环形导轨21的外圆周环绕转动连接;检测单元2不仅能整体上下移动,而且内部的检测相机22可相对飞机缸体做圆周、径向、轴向移动,使检测相机22能全面快速的完成拍照检测,检测精度和自动化程度高;所述检测相机22与控制主机3电连接,并由底座1上的操控单元4控制,自动化程度高,可避免人员操作导致的设备损坏。
进一步的,所述检测相机22为激光三角3D相机,拍照精度高;检测相机22的工作距离小,可避免检测相机22与飞机缸体内部凸出部件磕碰,增大了检测相机22的移动空间;检测相机22的侧面设置有一位置传感器28,位置传感器28能识别检测相机22与发动机缸体的距离,避免检测相机22与发动机缸体相撞,提高了检测相机22的使用寿命。
进一步的,所述环形导轨21包括轴向相连的环形导向部211和环形传动部212,所述导向部211的半径大于传动部212,传动部212内缩为导向轮27转动提供了空间;所述传动部212外圆周端设置有一圈传动齿,所述导向部211的内、外圆周端的径向截面为三角形;所述固定板26远离环形导轨21一端设置有第一电机29,第一电机29与控制主机3电连接并由控制主机3控制转动,所述第一电机29轴伸端穿过所述固定板26并通过一齿轮与环形导轨21的传动部212齿轮连接;所述导向轮27设置于固定板26的四角,导向轮27外圆周表面中部设置有一圈的三角形挖槽271,所述导向轮27通过挖槽271卡于所述导向部211的内、外圆周端,此滚动连接方式稳固可靠,能避免导向轮27脱出导向部211。
进一步的,所述径向滑动机构25包括设置于轴向滑动机构24下端的一T形滑座251,所述滑座251包括水平的支撑板2511和与支撑板2511中部垂直连接的连接板2512,所述连接板2512与固定板26在竖直方向上互相平行,所述滑座251在支撑板2511和连接板2512的连接处设置有一与支撑板2511、连接板2512垂直的加强筋2513,加强筋2513提高了支撑板2511和连接板2512连接的稳固性,所述支撑板2511、连接板2512和加强筋2513一体成形,结构强度高;所述固定板26在远离环形导轨21端的中上部设置有一竖直第一滑轨252,所述连接板2512在靠近固定板26一端设置有第一滑块253,所述连接板2512通过所述第一滑块253与所述固定板26上的第一滑轨252上下滑动连接;所述连接板2512在与固定板26垂直的侧端设置有一竖直的第一齿条254,所述固定板26上固定设置有一第二电机255,第二电机255与控制主机3电连接并由控制主机3控制转动,所述第二电机255的轴伸端通过一齿轮与所述第一齿条254齿轮连接。
进一步的,所述轴向滑动机构24包括支撑板2511顶端设置的与环形导轨21轴向平行的第二滑块241,所述第二滑块241上端设置有一与其滑动连接的第二滑轨242,所述检测相机22固定连接于所述第二滑轨242靠近环形导轨21的一端;所述第二滑轨242顶端设置有一第二齿条243,所述支撑板2511侧端固定设置有一第三电机244,第三电机244与控制主机3电连接并由控制主机3控制转动,所述第三电机244的轴伸端通过一齿轮与所述第二齿条243齿轮连接。
进一步的,所述底座1包括设置于底部的脚轮11、水平承托的底架12、竖直支撑检测单元2的支架13、包裹底架12和支架13的底座钣金14,所述脚轮11为带刹车的万向轮,方便检测机的移动与固定,底架12与支架13为高强度钢架结构,抗变形能力和稳定性好;所述支架13在与环形导轨21轴向相垂直的侧端设置有一组竖直的第三滑轨15,所述导轨固定板23下端设置有与所述第三滑轨15对应的第三滑块16,所述检测单元2通过所述导轨固定板23上的第三滑块16与所述支架13上的第三滑轨15上下滑动连接;所述导轨固定板23的下端中部设置有一L形连接座17,所述连接座17的竖直端与所述导轨固定板23固定连接,所述底架12在导轨固定板23的下方设置有一竖直升降机18,所述升降机18的活动升降端竖直朝上,所述连接座17的水平端向下抵扣于所述升降机18的活动端;所述升降机18由一第四电机19驱动,第四电机19与控制主机3电连接并由控制主机3控制转动。
进一步的,所述操控单元4包括底座1正/背面端设置的键盘41、触摸屏42、物理按键43等,所述键盘41、触摸屏42、物理按键43与所述控制主机3电连接;所述检测机的检测数据和运行状态显示于底座1正面的显示器44和指示灯45上;所述键盘41通过一伸缩托盘46活动隐藏于所述底座1内;所述物理按键43包括底座1正面端的启动按钮431和底座1背面端的升降按钮432、急停按钮433,便于飞机缸体对位时人员的操作;所述升降按钮432控制所述升降机18的上下移动;所述底座1的侧面设置有排气用百叶窗5,底座1的背面底端设置有多个排气扇6,排气扇6设置于底座1底端,排气时风流自上而下,使异物颗粒能顺着风流往下掉落,避免扰流使设备内环境恶化。
进一步的,所述导轨固定板23在远离飞机缸体一端设置有一柱形钣金外罩7,所述钣金外罩7在底座1正面端开设有一透明观察窗71,便于操作人员实时观察设备运作情况;所述导轨固定板23在靠近飞机缸体一端设置有一防尘盖板8,所述防尘盖板8的直径大于所述导轨固定板23的环形开口直径,钣金外罩7和防尘盖板8形成一密封空间,此密封设计保证了设备的洁净度,避免检测相机22镜头受污染,影响检测精度。
进一步的,所述导轨固定板23在靠近飞机缸体一端设置有一弧形定位机构9,所述弧形定位机构9包括与导轨固定板23固定连接的弧形定位块91,所述定位块91的弧形圆心与所述导轨固定板23的环形圆心重合;所述定位块91两端分别固定设置有一定位螺栓92,所述两定位螺栓92在同一圆周上且圆心与导轨固定板23的环形圆心重合;所述定位块91外滑动侧套接有一同心的弧形定位导槽93,所述定位导槽93在定位螺栓92处设置有一与导轨固定板23的环形圆心同心的开槽931,所述定位导槽93近圆心的弧形半径等于飞机缸体的外圆周半径,当飞机缸体靠近环形导轨固定板23时,定位导槽93能保证飞机缸体与导轨固定板23吻合对接,避免缸体和环形导轨21产生偏心,从而影响检测时间或检测的准确率。
一种飞机缸体检测机的工作方法,包括以下依序进行的步骤:
①将飞机缸体检测机移动至待检飞机缸体的前端,所述导轨固定板23远离环形导轨21的一端朝向待检飞机缸体的开口端,随后将防尘盖板8打开;然后通过操控单元4将检测单元2所需的高度输入检测机,控制主机3接收到命令后控制升降机18运转,检测单元2在升降机18的带动下移动到所需的测试高度;操作员通过弧形定位机构9确认发动机缸体与导轨固定板23是否对准,如有偏差可通过升降按钮432控制第四电机19的正反转,从而控制升降机18带动所述检测单元2上下移动;当待检飞机缸体的转轴与所述环形导轨21的轴线重合时,将导轨固定板23与飞机缸体紧贴在一起;此时弧形定位机构9紧贴飞机缸体的外表面,提高了飞机缸体与导轨固定板23对接的精度;
②通过操控单元4设置检测单元2的检测起点、检测行程、工作距离等,然后按下启动按钮431,控制主机3控制检测单元2开始对位与校准;
③控制主机3控制第三电机244转动,轴向滑动机构24由第三电机244带动,检测相机22通过第二滑块241和第二滑轨242轴向移动至飞机缸体检测的起始点,此时检测相机22位于飞机缸体的边缘;
④控制主机3控制第二电机255转动,径向滑动机构25由第二电机255带动,检测相机22通过第一滑块253和第一滑轨252径向移动至所需拍照的位置,此时飞机缸体的内圆周表面的成像最清晰;
⑤检测单元2在控制主机3的控制下开始自动检测,首先检测相机22在第一电机29的带动下,环绕飞机缸体的内表面完成一圆周的拍照;随后轴向滑动机构24将检测相机22移动至下一检测区域,然后第一电机29带动检测相机22完成一圆周的拍照,重复以上动作直至检测相机22完成飞机缸体内圆周表面的检测;
⑥拍照完成后通过控制主机3和内设的程序将图像合成为三维图形,操作员通过操控单元4完成三维图的分析和确认。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种飞机缸体检测机
- 一种能够实现自动化对接的发动机缸体气密性检测机