爬壁清洗机器人
文献发布时间:2023-06-19 09:44:49
技术领域
本发明属于机器人领域,尤其是涉及爬壁清洗机器人。
背景技术
随着现代化建设的快速推进,高层建筑愈来愈多,针对高层建筑玻璃外墙的清洗业也不断发展,目前高空玻璃外墙清洗基本上依赖于传统的“蜘蛛人”进行清洗,“蜘蛛人”属于危险度极高的作业方式,并存在清洁效率低、劳动强度大、受外界环境影响大等诸多问题。
发明内容
本发明要解决的技术问题是,为了克服现有技术的不足,提供一种简单快捷的爬壁清洗机器人。
为了实现上述目的,本发明采用了如下技术方案:一种爬壁清洗机器人,包括机器人本体,所述机器人本体包括电机箱体,所述电机箱体的两侧安装有滑片,所述滑片内置有若干弹簧;所述电机箱体上部还连接有清灰装置,所述清灰装置底部有喷气口和喷水口,所述清灰装置下方还设置有清洗盘,所述清洗盘安装在移动滑轨上,所述移动滑轨设置在电机箱体内,带动清洗盘沿移动滑轨运动,所述清洗盘包括吸盘条及与吸盘条连接的机械上升臂及机械上升臂升降控制转盘,机械上升臂控制电机,所述吸盘条至少为两组;所述电机箱体上还设置有储水箱,所述储水箱通过管道与清灰装置连接。
优选的,所述电机箱体上还设置有摄像头及保险装置。
优选的,所述吸盘条还连接有负压电机。
优选的,所述电机箱体内还设置有滑槽,其上配合安装有移动滑轨。
本发明是一种特别针对于竖直玻璃壁面的清洗机器人,所述机械上升臂主要是为了机器人整个攀爬提供支撑,采用双机械臂使其交互上爬达到最终的移动效果,所述的机械上升臂控制电机主要用于机器整个爬壁过程的两个机械臂的配合,使其完成爬壁动作,所述吸盘条搭载与机械上升臂上为其爬壁提供吸附作用;所述吸盘控制系统主要用于吸盘的收放以及与爬壁时机械臂的配合,此系统采用负压电机交替运作让其来控制两个吸盘进项爬壁。
滑片内置有若干弹簧主要是为了配合清洗系统在清洁面有一个较好的接触,达到一个清洁所需的压力,避免压力过大或过小产生的摩擦力较大或者摩擦力不足产生的清洗不干净等问题;还有在越障的时候能够帮助主体进行平稳的越过障碍物,比现有的机械能够有很大的改善。
所述负压电机主要用于控制吸盘条,两个负压电机控制两个吸盘条,通过吸放以及机械臂的控制来达到爬壁的效果。
所述的清洁盘位于主框架结构上,通过水平移动达到清洗的目标,其他设备来配合其工作。
所述的摄像头位于机器人的上部一个朝前方,一个朝后方,使得整个管道的情况都可以在外机上所看到,帮助人们更好的观察其周围情况。
所述的清灰装置位于机器人的两个机械臂之间,在爬壁的过程中对于吸盘所要吸附的位置进行前期的处理让其有更好的吸附能力,避免出现脱落等问题。次装置前端有多个细微的喷头及小的出风口,通过软管与滑轨上的水箱相连接提供少量的水来进行预清洗,在通过风机把水吹散,让其有较好的吸附能力,还可以进行小幅度的活动让其清理的范围更大具有更好的适应力;所述的保险装置位于主体框架上,以免在使用过程中出现意外。
附图说明
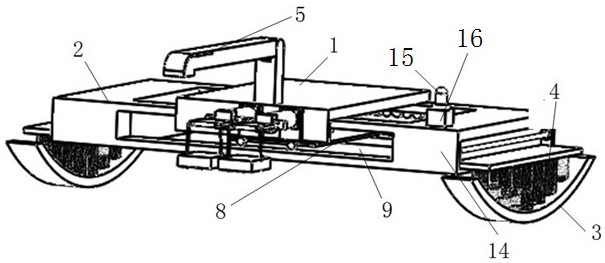
图1本发明爬壁清洗机器人整体结构示意图;
图2本发明清洗盘装置结构示意图;
图3本发明滑片结构示意图;
图4本发明移动滑轨结构示意图;
图5本发明清灰装置结构示意图;
附图标记:机器人本体-1,电机箱体-2,滑片-3,弹簧-4,清灰装置-5,喷气口-6,喷水口-7,清洗盘-8,移动滑轨-9,吸盘条-10,机械上升臂-11,机械上升臂升降控制转盘-12,机械上升臂控制电机-13,储水箱-14,摄像头-15,保险装置-16,滑槽-17。
具体实施方式
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
如图1-5所示,一种爬壁清洗机器人,包括机器人本体1,所述机器人本体包括电机箱体2,所述电机箱体2的两侧安装有滑片3,所述滑片3内置有若干弹簧4;所述电机箱体2上部还连接有清灰装置5,所述清灰装置5底部有喷气口6和喷水口7,所述清灰装置5下方还设置有清洗盘8,所述清洗盘8安装在移动滑轨9上,所述移动滑轨9设置在电机箱体2内,带动清洗盘8沿移动滑轨9运动,所述清洗盘8包括吸盘条10及与吸盘条连接的机械上升臂11及机械上升臂升降控制转盘12,机械上升臂控制电机13,所述吸盘条至少为两组;所述电机箱体上还设置有储水箱14,所述储水箱14通过管道与清灰装置5连接。
所述电机箱体2上还设置有摄像头15及保险装置16。
所述吸盘条10还连接有负压电机(图中未示出)。
所述电机箱体内还设置有滑槽17,其上配合安装有移动滑轨9。
本发明在使用过程中,如果进行上述所说的爬壁作业包括清洗过程,先由人工把机器放置于所需清洁的壁面或玻璃面,再由清灰装置对吸盘所需吸附的地方进行预清理,所述的清灰装置通过螺栓与主体结构相连接,中空的形式里面有两个排布在两边的风管(喷气口6)及中间的水管(喷水口7)组成,水泵驱动时中间的小孔喷水,和风机配合对壁面进项预处理,先喷水再吹干,接着由机械臂移动到所需吸附位置,吸盘控制器进行指令的下达,吸盘条下放进行吸附,在吸附动作完成时进行一个轻微的抬臂动作对其所吸附的效果进行检测,如果有误则重复进行上述的步骤,两个机械臂交替进行爬壁,实现移动的功能,在爬壁稳定后另一个机械手臂的吸盘也进行吸附来控制机器在运作过程的稳定性,在吸附稳定后清洗盘在移动滑轨装置上移动进行清洗过程,在根据不同的清洁需求采用不同的清理方式,如果灰尘较少,采用直接清理不需要带辅助设备,如果灰尘较多,我们可以搭载水管及清洗剂,通过冲刷使其干净,在越障的时候我们的机器人通过滑片及弹簧它可以根据不同的越障高度进行合理的形变,它与主体相连接,滑片中间采用弹簧减震系统,底部采用平滑的弧线平面结构与接触面相连接,在移动的过程中程点接触减少摩擦力,在越障的过程中因为他是一个弧面构造所以只需要大于平面行走15%的动力就可以进行越障功能,弧形结构能够保证在越障的过程中保持平稳的前进。
- 一种爬壁清洗机器人系统
- 一种水下爬壁船舶清洗机器人