一种带电作业机器人剥线工具
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及一种剥线工具,具体来说,涉及一种带电作业机器人剥线工具。
背景技术
随着我国工业生产和人民生活水平的提高,对供电可靠性要求越来越高,配网带电作业不仅可以挺高供电可靠性,大大减少用户停电范围和时间,而且具有明显的经济效益,我国带电作业技术的研究起于20世纪50年代,至今已经发展了近70年,但都是基于人工的带电作业,人工带电作业必须采用专门的屏蔽服、绝缘服、仪器设备和绝缘工具,且主要为高空作业,不仅作业难度大,技术要求高,危险系数高,也对从业人员的技术能力和心理素质都有较高的要求,与发达国家相比,我国带电作业从业人员数量还存在较大缺口。
近几年机器人和人工智能技术在我国发展迅速,机器人代替人工实施带电作业也成为必然的发展趋势,在众多带电作业项目中,10KV配网断接线是最常见也是需求量最高的项目。在10KV配网断接线作业过程中,对架空线缆实施剥离绝缘层作业是必要的流程,因此,剥线工具成为机器人带电作业的关键工具,也是利用机器人实施配网断接线的关键技术之一。
针对相关技术中的问题,目前尚未提出有效的解决方案。
发明内容
针对相关技术中的上述技术问题,本发明提出一种带电作业机器人剥线工具,能够解决上述问题。
为实现上述技术目的,本发明的技术方案是这样实现的:
一种带电作业机器人剥线工具,包括底座和设置于底座的控制器,所述底座上设置有直线导轨,所述直线导轨滑动连接有轴向进给装置,所述轴向进给装置上连接有主轴支架,所述主轴支架上设置有驱动电机,所述驱动电机的输出端连接有驱动齿轮,所述驱动齿轮的两侧分别设置有中间齿轮,所述驱动齿轮通过所述中间齿轮传动连接有主轴齿轮,所述主轴齿轮垂直于所述直线导轨,所述主轴齿轮上设置有开口,所述开口与所述主轴齿轮的齿轮孔连通,所述主轴齿轮的一侧固定连接有对中支架,所述对中支架上设置有对中电机,所述对中电机连接有第一左右旋丝杠,所述第一左右旋丝杠上连接有两个相互扣合的卡板,两个相互扣合的所述卡板之间设置有固线部,所述对中支架的一侧连接有刀具组件,所述直线导轨两侧分别设置有相互平行的夹紧装置,所述夹紧装置的夹紧部与所述主轴齿轮的齿轮孔和所述固线部位于同一直线上;所述控制器分别与所述驱动电机、对中电机、轴向进给装置、夹紧装置和刀具组件连接,所述底座上可拆卸连接有移动电源,所述移动电源与所述控制器连接。
进一步的,所述刀具组件包括刀具电机和刀具,所述刀具电机的输出端连接有第一同步轮,所述第一同步轮通过所述第一同步带连接有第二同步轮,所述第二同步轮连接有用于移动所述刀具的丝杆,所述丝杆远离所述第二同步轮的一端设置有第一手动调整环,所述刀具的移动方向与所述轴向进给装置的移动方向垂直。
进一步的,所述卡板的一个侧面上设置有刀具触线感应装置,所述刀具触线感应装置的压线端上设置有感应触头,所述刀具触线感应装置与所述控制器连接。
进一步的,所述对中电机的输出端连接有第一齿轮,所述第一齿轮传动连接有第二齿轮,所述第二齿轮连接有用于移动两个所述卡板的所述第一左右旋丝杠,所述第一左右旋丝杠远离所述第二齿轮的一端设置有第二手动调整环。
进一步的,所述夹紧装置包括夹紧支架,所述夹紧支架上设置有导向轴,所述导向轴上滑动连接有两个相互扣合的夹块,所述夹紧支架的一侧安装有夹紧电机,所述夹紧电机的输出端连接有用于移动两个所述夹块的第二左右旋丝杠。
进一步的,两个所述夹块的顶端设置有向外侧倾斜且相互对称的第一导向杆。
进一步的,所述轴向进给装置包括滑块和电机,所述滑块滑动连接于所述直线导轨上,所述直线导轨两端分别设置有第三同步轮,两个所述第三同步轮上传动连接有第二同步带,所述第二同步带与所述滑块固定连接,所述滑块上连接有主轴支架,所述电机的输出端与所述第三同步轮连接。
进一步的,所述主轴支架上设置有向外侧倾斜且相互对称的第二导向杆,所述第二导向杆位于所述开口的一端。
进一步的,所述底座上设置有底座外壳,所述底座外壳上设置有天线,所述天线与所述控制器连接。
本发明的有益效果:
1.本发明设有的两个夹紧装置将线缆两端固定,主轴齿轮旋转将带动刀具的旋转,刀具沿线缆径向移动,此时轴向进给装置沿线缆轴向移动,当刀具及感应触头同时接触线芯时,刀具与感应触头通过线芯短路,并向控制器发出感应信号,控制器调整刀具与线芯脱离,通过此设计使得装置整体安全可靠,操作便捷且剥线精度高。
2.本发明设有天线和控制器,可以满足无线控制该装置剥线的进行。
3.本发明设有对中支架、对中电机、第一左右旋丝杠和卡板,对中电机通过第一左右旋丝杠可以调整卡板之间的距离,两个卡板将线缆对中固定保证了线缆的顺直,提高了剥线精度。
4.本发明设有第一导向杆和第二导向杆,使线缆便于落入夹块和主轴齿轮的开口中。
5.本发明设有第一手动调整环和第二手动调整环,可以通过第一手动调整环使刀具沿线缆径向移动,可以通过第二手动调整环来调整两卡板之间的距离。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
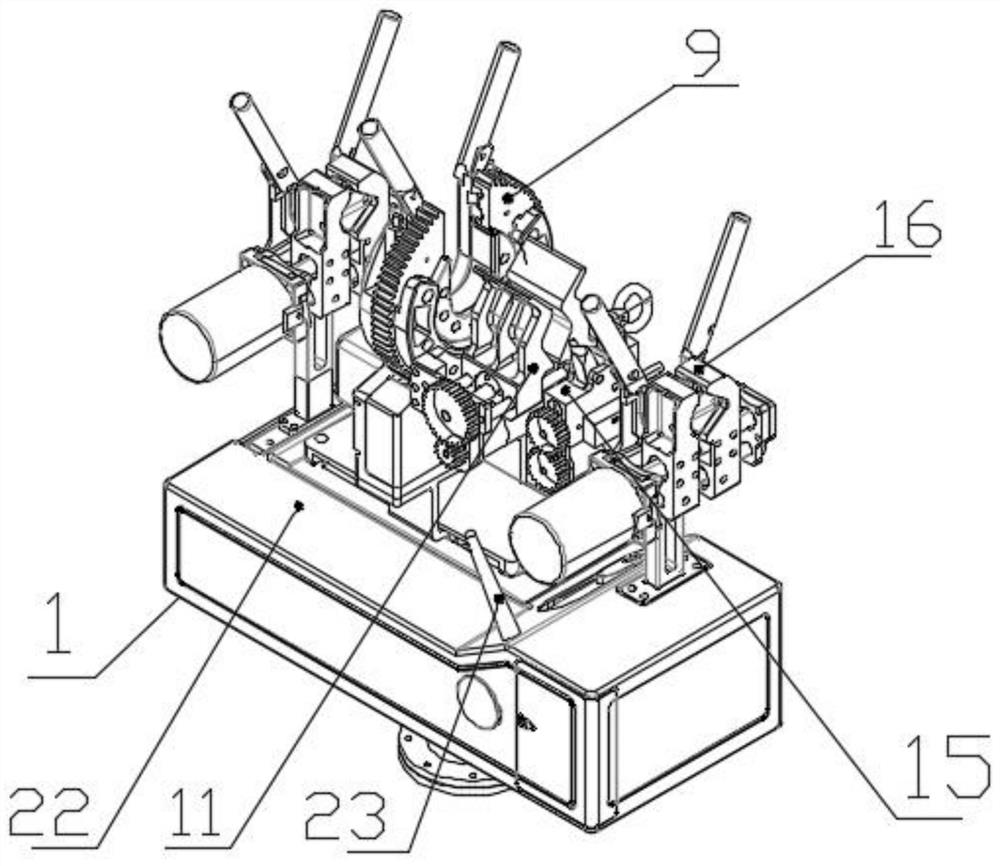
图1是根据本发明实施例所述的一种带电作业机器人剥线工具的结构示意图。
图2是根据本发明实施例所述的一种带电作业机器人剥线工具拆除底座外壳的结构示意图。
图3是根据本发明实施例所述的一种带电作业机器人剥线工具的局部结构示意图一。
图4是根据本发明实施例所述的一种带电作业机器人剥线工具的局部结构示意图二。
图5是根据本发明实施例所述安装于对中支架上的刀具组件结构示意图。
图6是根据本发明实施例所述夹紧装置的结构示意图。
图7是根据本发明实施例所述轴向进给装置的结构示意图。
图中:1.底座,2.控制器,3.直线导轨,4.轴向进给装置,41.滑块,42.第三同步轮,43.第二同步带,5.主轴支架,6.驱动电机,7.驱动齿轮,8.中间齿轮,9.主轴齿轮,10.开口,11.对中支架,12.对中电机,13.第一左右旋丝杠,14.卡板,15.刀具组件,151.刀具电机,152.刀具,153.第一同步轮,154.第二同步轮,155.丝杆,156.第一手动调整环,16.夹紧装置,161.夹紧支架,162.导向轴,163.夹块,164.夹紧电机,165.第二左右旋丝杠,166.第一导向杆,17.刀具触线感应装置,18.第一齿轮,19.第二齿轮,20.第二手动调整环,21.第二导向杆,22.底座外壳,23.天线。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
如图1-7所示,根据本发明实施例所述的一种带电作业机器人剥线工具,包括底座1和设置于底座1的控制器2,所述底座1上设置有直线导轨3,所述直线导轨3滑动连接有轴向进给装置4,所述轴向进给装置4上连接有主轴支架5,所述主轴支架5上设置有驱动电机6,所述驱动电机6的输出端连接有驱动齿轮7,所述驱动齿轮7的两侧分别设置有中间齿轮8,所述驱动齿轮7通过所述中间齿轮8传动连接有主轴齿轮9,所述主轴齿轮9垂直于所述直线导轨3,所述主轴齿轮9上设置有开口10,所述开口10与所述主轴齿轮9的齿轮孔连通,所述主轴齿轮9的一侧固定连接有对中支架11,所述对中支架11上设置有对中电机12,所述对中电机12连接有第一左右旋丝杠13,所述第一左右旋丝杠13上连接有两个相互扣合的卡板14,两个相互扣合的所述卡板14之间设置有固线部,所述对中支架11的一侧连接有刀具组件15,所述直线导轨3两侧分别设置有相互平行的夹紧装置16,所述夹紧装置16的夹紧部与所述主轴齿轮9的齿轮孔和所述固线部位于同一直线上;所述控制器2分别与所述驱动电机7、对中电机12、轴向进给装置4、夹紧装置16和刀具组件15连接,所述底座1上可拆卸连接有移动电源,所述移动电源与所述控制器2连接。
在本发明的一个具体实施例中,所述刀具组件15包括刀具电机151和刀具152,所述刀具电机151的输出端连接有第一同步轮153,所述第一同步轮153通过第一同步带连接有第二同步轮154,所述第二同步轮154连接有用于移动所述刀具152的丝杆155,所述丝杆155远离所述第二同步轮154的一端设置有第一手动调整环156,所述刀具152的移动方向与所述轴向进给装置4的移动方向垂直。
在本发明的一个具体实施例中,所述卡板14的一个侧面上设置有刀具触线感应装置17,所述刀具触线感应装置17的压线端上设置有感应触头,所述刀具触线感应装置17与所述控制器2连接。
在本发明的一个具体实施例中,所述对中电机12的输出端连接有第一齿轮18,所述第一齿轮18传动连接有第二齿轮19,所述第二齿轮19连接有用于移动两个所述卡板14的所述第一左右旋丝杠13,所述第一左右旋丝杠13远离所述第二齿轮19的一端设置有第二手动调整环20。
在本发明的一个具体实施例中,所述夹紧装置16包括夹紧支架161,所述夹紧支架161上设置有导向轴162,所述导向轴162上滑动连接有两个相互扣合的夹块163,所述夹紧支架161的一侧安装有夹紧电机164,所述夹紧电机164的输出端连接有用于移动两个所述夹块163的第二左右旋丝杠165。
在本发明的一个具体实施例中,两个所述夹块163的顶端设置有向外侧倾斜且相互对称的第一导向杆166。
在本发明的一个具体实施例中,所述轴向进给装置4包括滑块41和电机,所述滑块41滑动连接于所述直线导轨3上,所述直线导轨3两端分别设置有第三同步轮42,两个所述第三同步轮42上传动连接有第二同步带43,所述第二同步带43与所述滑块41固定连接,所述滑块41上连接有主轴支架5,所述电机的输出端与所述第三同步轮42连接。
在本发明的一个具体实施例中,所述主轴支架5上设置有向外侧倾斜且相互对称的第二导向杆21,所述第二导向杆21位于所述开口10的一端。
在本发明的一个具体实施例中,所述底座1上设置有底座外壳22,所述底座外壳22上设置有天线23,所述天线23与所述控制器2连接。
为了方便理解本发明的上述技术方案,以下通过具体使用方式上对本发明的上述技术方案进行详细说明。
在具体使用时,根据本发明的一种带电作业机器人剥线工具,两个夹紧装置16将线缆两端固定,对中电机12通过第一左右旋丝杠13调整两个卡板14之间的距离,两个卡板14将线缆对中固定,刀具触线感应装置17的感应触头抵触线缆,此时刀具组件15和对中支架11随主轴齿轮9同步旋转,刀具电机151通过第一同步轮153、第一同步带、第二同步轮154和丝杆155带动刀具152沿线缆径向移动,当刀具152及感应触头同时接触线芯时,刀具152与感应触头通过线芯短路,并向控制器2发出感应信号,控制器2调整刀具152与线芯脱离,也可以通过遥控器发送控制信号,天线23接收该信号并传输至控制器2,由相应装置部件完成控制器2发出的控制指令。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种带电作业机器人剥线工具
- 一种带电作业机器人剥线工具