一种管道攀爬机器人
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种管道攀爬机器人,属于管道检修机器人领域。
背景技术
管道检修机器人,一般是履带式或者是长伸缩杆式或者是光纤式,前者履带式只能适应大型且负重性能较好的管路,对于直径相对较小的管路无法胜任,和伸缩杆式和光纤式,则可以伸入到管道内的长度较为有限,无法进行对长距离以及弯曲度较高的管路的观测。
发明内容
本发明要解决的技术问题是:克服现有技术中管道机器人管道适应性有限的技术问题,提供一种管道攀爬机器人。
本发明解决其技术问题所采用的技术方案是:
一种管道攀爬机器人,包括前节和后节;其中前节和后节均包括一个支撑管,在支撑管的表面环形阵列设置有若干蠕动支撑机构,所述蠕动支撑机构包括一个往复活塞,在往复活塞的浮动活塞杆的两端部转动连接有主连杆;所述蠕动支撑机构还包括位于支撑管两端部的两个转动支撑座A,在转动支撑座A上转动连接有副连杆,主连杆和副连杆之间转动连接;在主连杆和副连杆的转动连接轴上固定连接有一个支撑顶杆;所述蠕动支撑机构还包括一个弧形的支撑片,在支撑片的轴向一端设置有橡胶质的摩擦块,在支撑片的轴向另一端设置有尼龙材质的滑动块;所述各个弧形的支撑片互相拼合,在支撑管外部围成一个环形的包覆面,支撑顶杆的端部通过转动支撑座B转动连接到支撑片的端部;在所述后节的支撑管内设置有一个伸缩推杆机构,伸缩推杆机构通过气缸驱动,在前节支撑管的末端设置有一个球铰机构A,伸缩推杆机构的伸缩杆端部通过球铰机构B连接有一个主连杆,主连杆端部连接于球铰机构A的球头上,在前节的支撑管内设置有一个压力罐,压力罐上通过若干组压力阀连接到往复活塞的两端上;本发明通过前后节的伸缩实现蠕动,同时配合以支撑片双向摆动,支撑片同时可以间距攀爬以及滑动支撑的功能,在攀爬的同时,不会对管路带来磨损等问题。
作为本发明的进一步改进,在所述支撑管的两端通过法兰分别设置前端挡板和后端挡板,前端挡板和后端挡板的直径与包覆面的直径相同;前挡板和后挡板可以防止管路内的杂物进入到支撑片与支撑管之间的空隙中,对机构的活动造成影响。
作为本发明的进一步改进,在前端挡板和后端挡板的外圈上设置有环形的限位支撑圈,支撑片的两端部与限位支撑圈接触;限位支撑圈对支撑片的运动位置进行限位,防止过度移动导致机构发生干涉和撞车。
作为本发明的进一步改进,在限位支撑圈上设置有一个限位凹槽,支撑片的端部与限位凹槽的底端接触;限位凹槽可以使得支撑片的端与与前端挡板、后端挡板表面之间构成一个密封间隙,保证支撑片收拢后整个机构可以整体密封。
作为本发明的进一步改进,所述前节的后端挡板和后节的前端挡板的外围之间连接有伸缩风琴管,伸缩风琴管可以对伸缩推杆机构的伸缩部分进行保护,降低管道内异物给本结构带来影响。
作为本发明的进一步改进,所述前节的后端挡板和后节的前端挡板的外围之间环形阵列设置有若干浮动连接机构,所述浮动连接机构包括一个伸缩杆机构,伸缩杆机构的两端部通过球铰机构C连接到后端挡板和前端挡板的环形外围;浮动连接机构可以辅助支撑,降低机构偏转时伸缩杆机构的伸缩轴的负载。
作为本发明的进一步改进,所述伸缩推杆机构的推杆上套接有一个内同步环,在同步环上通过若干连接杆环形阵列连接有若干外同步环,外同步环套接于伸缩杆机构上,同步环可以将浮动连接机构的支撑传递给伸缩推杆机构的主连杆,提升支撑效果。
作为本发明的进一步改进,在所述支撑管的外部阵列设置有两组支撑凸起圈,支撑凸起圈用于与主连杆和副连杆的转动连接位支撑接触,支撑凸起圈的相对支撑管表面的高度大于转动支撑座A的高度支撑凸起圈可以对主连杆和副连杆的转动角度进行限位,防止主连杆和副连杆反向折叠,导致机构卡死。
作为本发明的进一步改进,支撑顶杆的两端包括支撑块,支撑块之间通过一个弹簧片活动连接,弹簧片可以提升支撑板端部与管道内壁的夹持力度,同时补偿不等径管道场景下,带来的支撑板摆动不同步的问题。
作为本发明的进一步改进,所述往复活塞包括一个活塞外壳,在活塞外壳内部浮动连接有一个浮动活塞,在浮动活塞上同轴连接一个浮动活塞杆,浮动活塞杆的两端伸出到活塞外壳外部。
本发明的有益效果是:
本发明通过可以展开和收拢的支撑片结构,通过支撑片前端的摩擦和尾端的滑动支撑,实现管道攀爬机器人在管道内的快速攀爬,无复杂的连杆机构以及复杂的支撑机构,简单方便。
附图说明
下面结合附图和实施例对本发明进一步说明。
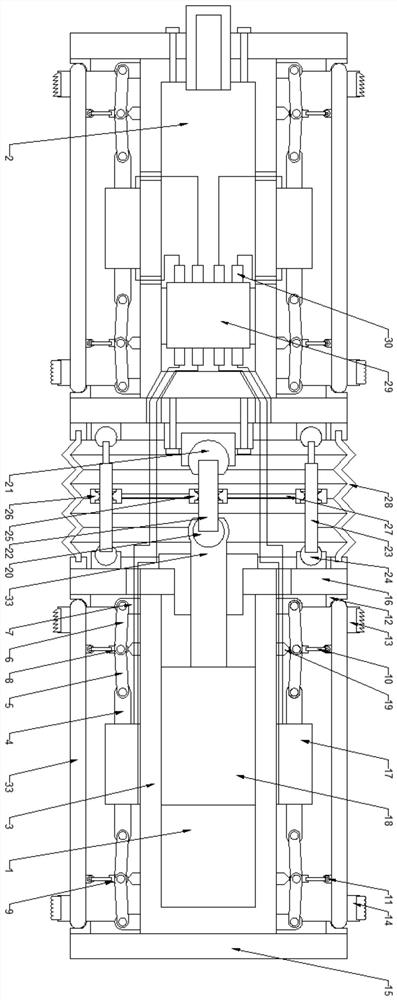
图1是本发明的结构示意图;
图2是往复活塞的示意图。
图中:1、后节;2、前节;3、支撑管;4、浮动活塞杆;5、主连杆;6、副连杆;7、转动支撑座A;8、转动连接轴;9、支撑顶杆;10、弹簧片;11、转动支撑座B;12、限位支撑圈;13、摩擦块;14、滑动块;15、后端挡板;16、前端挡板;17、往复活塞;18、伸缩推杆机构;19、限位支撑圈;20、球铰机构B;21、球铰机构A;22、主连杆;23、伸缩杆机构;24、球铰机构C;25、内同步环;26、外同步环;27、连接杆;28、伸缩风琴管;29、压力罐;30、压力阀;31、活塞外壳;32、浮动活塞;33、支撑片。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1所示,本发明为如图1,一种管道攀爬机器人,包括前节和后节;其中前节和后节均包括一个支撑管,在支撑管的表面环形阵列设置有若干蠕动支撑机构,所述蠕动支撑机构包括一个往复活塞,如图2,所述往复活塞包括一个活塞外壳,在活塞外壳内部浮动连接有一个浮动活塞,在浮动活塞上同轴连接一个浮动活塞杆,浮动活塞杆的两端伸出到活塞外壳外部,在往复活塞的浮动活塞杆的两端部转动连接有主连杆;所述蠕动支撑机构还包括位于支撑管两端部的两个转动支撑座A,在转动支撑座A上转动连接有副连杆,主连杆和副连杆之间转动连接,在所述支撑管的外部阵列设置有两组支撑凸起圈,支撑凸起圈用于与主连杆和副连杆的转动连接位支撑接触,支撑凸起圈的相对支撑管表面的高度大于转动支撑座A的高度;在主连杆和副连杆的转动连接轴上固定连接有一个支撑顶杆;所述蠕动支撑机构还包括一个弧形的支撑片,在支撑片的轴向一端设置有橡胶质的摩擦块,在支撑片的轴向另一端设置有尼龙材质的滑动块;所述各个弧形的支撑片互相拼合,在支撑管外部围成一个环形的包覆面,支撑顶杆的端部通过转动支撑座B转动连接到支撑片的端部,支撑顶杆的两端包括支撑块,支撑块之间通过一个弹簧片活动连接;在所述后节的支撑管内设置有一个伸缩推杆机构,伸缩推杆机构通过气缸驱动,在前节支撑管的末端设置有一个球铰机构A,伸缩推杆机构的伸缩杆端部通过球铰机构B连接有一个主连杆,主连杆端部连接于球铰机构A的球头上,在前节的支撑管内设置有一个压力罐,压力罐上通过若干组压力阀连接到往复活塞的两端上。
在所述支撑管的两端通过法兰分别设置前端挡板和后端挡板,前端挡板和后端挡板的直径与包覆面的直径相同;在前端挡板和后端挡板的外圈上设置有环形的限位支撑圈,支撑片的两端部与限位支撑圈接触;在限位支撑圈上设置有一个限位凹槽,支撑片的端部与限位凹槽的底端接触。
所述前节的后端挡板和后节的前端挡板的外围之间连接有伸缩风琴管;所述前节的后端挡板和后节的前端挡板的外围之间环形阵列设置有若干浮动连接机构,所述浮动连接机构包括一个伸缩杆机构,伸缩杆机构的两端部通过球铰机构C连接到后端挡板和前端挡板的环形外围;所述伸缩推杆机构的推杆上套接有一个内同步环,在同步环上通过若干连接杆环形阵列连接有若干外同步环,外同步环套接于伸缩杆机构上。
使用时,如图1所示,后节和前节首先通过伸缩推杆机构的伸缩实现后节和前节的往复挪动实现蠕动,同时利用主连杆两端的球铰机构实现前节和后节的摆动,以适应管路的弯曲;并通过伸缩杆机构和球铰机构C辅助支撑;要进行蠕动时,首先是往前移动,通过前节的往复活塞的往前移动,使得浮动活塞杆往前移动,使得位于前节支撑管前端的主连杆和福连杆弯曲,从而推动弹簧片,并通过弹簧片推动支撑片一侧向外扩展,使得支撑片的摩擦块与管道内壁接触,同时后节的往复活塞往后移动,使得后节的支撑片尾部向外扩展,使得滑动块与管道内壁接触,此时,收缩伸缩推杆机构,前节拉动后节挪动,就是先了往前移动,往后移动同样,先是后节与前节拉伸,随后后节的支撑片的摩擦块接触到管内壁,前节的滑动孔接触到管内壁,后节拉动前节移动,是先反向移动,压力由气泵通过压力管连接到压力罐上,由压力罐上的各个阀进行压力传递;本结构后节配置伸缩推杆机构,前节布置压力罐,配重也更为优化。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种自适应管道攀爬机器人
- 一种管道攀爬机器人