一种电动颈腰椎牵引床及其拉力自动补偿功能系统
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及电动颈腰椎牵引床控制技术领域,具体是一种电动颈腰椎牵引床及其拉力自动补偿功能系统。
背景技术
腰椎牵引床是一种采用机械传动实行牵引的器械。应用人体生理学与机械物理力学科学结合特点。腰椎牵引床广泛应用于各种急、慢性损伤引起的腰椎间盘突出、腰痛、放射性腿脚麻木、行走无力而引起腿脚肌肉萎缩,以及外伤性颈椎骨折、错位、脱位等症状;也可适用于颈椎性头晕目眩,头痛耳鸣、血压异常等临床症状。
现有的腰椎牵引床包括床架,床架设有牵伸机构;床架上设置有前部床面和后部床面, 前部床面与床架相固定,后部床面与床架活动连接,受牵引机构的牵引进行人身的拉伸;但是对牵伸电机牵引功率的调节主要是通过病人的痛感反馈而进行调节的,无法达到理想合适的牵引功率输出;也无法解决电动颈腰椎牵引床运行中由于衣服或绑带滑动造成拉力下降不均衡需要人工手动补力的问题。
发明内容
本发明的目的在于提供一种电动颈腰椎牵引床及其拉力自动补偿功能系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种电动颈腰椎牵引床的拉力自动补偿功能系统,包括拉力检测单元和控制单元,所述控制单元预设有控制电动颈腰椎牵引床的牵引机构的控制指令,当控制指令驱动牵引机构运行时,拉力检测单元采集牵引机构的牵引力数据并反馈给控制单元,控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿,当牵引力数据大于或者小于设定值时进行拉力自动补偿,让牵引力数据始终保持在设定值范围内。
作为本发明进一步的方案:所述拉力检测单元包括信号处理电路、设置在牵引机构的颈椎牵引部和腰椎牵引部的若干力传感器,所述力传感器通过信号处理电路与控制单元连接,所述信号处理电路用于将力传感器的反馈信号进行去噪、放大后传输给控制单元。
作为本发明再进一步的方案:所述信号处理电路设有滤波器、放大器。
作为本发明再进一步的方案:所述的控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿分为:当拉力检测单元采集的牵引力数据低于设定值的下阈值后,控制指令增加牵引机构的输出,以补偿牵引力至设定值;当拉力检测单元采集的牵引力数据超过设定值的上阈值后,控制指令减小牵引机构的输出以使牵引力至设定值牵引机构的输出。
作为本发明再进一步的方案:所述控制单元通过继电器调节牵引机构的输出。
作为本发明再进一步的方案:所述的以补偿牵引力至设定值为:当颈部和腰部连续性牵引和间歇性牵引的拉力低于设定值开始自动补偿拉力到设定值,当牵引力超过设定值则自动退回到设定值,始终控制颈椎牵引部和腰椎牵引部的拉力在设定值的正常范围内,始终保持拉力均衡。
所述控制单元微处理器、与微处理器连接的电源、显示单元及操作单元,所述微处理器通过显示单元显示电动颈腰椎牵引床的工作数据,通过操作单元设置控制指令。
作为本发明再进一步的方案:所述微处理器连接有声光提示单元,所述声光提示单元用于发出提示信号。
作为本发明提供的另一个技术方案:一种电动颈腰椎牵引床,所述电动颈腰椎牵引床包括如上任一所述的电动颈腰椎牵引床的拉力自动补偿功能系统。
与现有技术相比,本发明的有益效果是:通过设置的拉力检测单元采集牵引力数据,并反馈给控制单元,由控制单元自动控制牵引机构;达到合适的牵引功率输出;也解决了电动颈腰椎牵引床运行中由于衣服或绑带滑动造成拉力下降、不均衡需要人工手动补力的问题,让电动颈腰椎牵引床运行时更加智能化。
附图说明
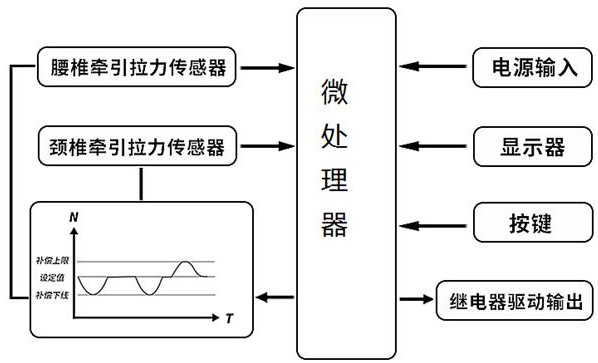
图1为本发明实施例中电动颈腰椎牵引床的拉力自动补偿功能系统的结构示意图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实施例公开的一些方面相一致的装置和方法的例子。
请参阅图1,本发明实施例中,一种电动颈腰椎牵引床的拉力自动补偿功能系统,包括拉力检测单元和控制单元,所述控制单元预设有控制电动颈腰椎牵引床的牵引机构的控制指令,当控制指令驱动牵引机构运行时,拉力检测单元采集牵引机构的牵引力数据并反馈给控制单元,控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿,当牵引力数据大于或者小于设定值时进行拉力自动补偿,让牵引力数据始终保持在设定值范围内。
电动颈腰椎牵引床的牵引机构包括电动推杆,多个电动推杆分别固定在电动颈腰椎牵引床的颈椎牵引部和腰椎牵引部,电动推杆的伸缩端设有绷带或固定带;进行腰椎和颈椎的牵引前,先设置好控制单元用以控制电动颈腰椎牵引床的牵引机构的控制指令;设置好后,电动颈腰椎牵引床开始运行,控制单元控制颈椎牵引部和腰椎牵引部的电动推杆正常运行,颈椎牵引部的拉力检测单元和腰椎牵引部的拉力检测单元采集到牵引力及其变化量,将牵引力、变化量信号放大后送入控制单元分析,辨别在运行中遇到的牵引力变化,根据工作模式选择相应的控制指令驱动电动推杆的进退与停止,当拉力检测单元采集的牵引力数据高于或低于设定值的阈值后,减小或增加牵引机构的输出,始终控制颈椎牵引部和腰椎牵引部的牵引力在设定值的范围内,保持牵引力均衡;也解决了电动颈腰椎牵引床运行中由于衣服或绑带滑动造成拉力下降、不均衡需要人工手动补力的问题。通过拉力自动补偿功能使电动颈腰椎牵引床更加智能化。
请参阅图1,本发明实施例中,所述拉力检测单元包括信号处理电路、设置在牵引机构的颈椎牵引部和腰椎牵引部的若干力传感器,所述力传感器通过信号处理电路与控制单元连接,所述信号处理电路用于将力传感器的反馈信号进行去噪、放大后传输给控制单元。进一步的,所述信号处理电路设有可进行去噪、放大的滤波器、放大器。
两个力传感器分别作为颈椎牵引拉力传感器和腰椎牵引拉力传感器;并分别通过滤波器、放大器接通控制单元。
请参阅图1,本发明实施例中,所述的控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿分为:当拉力检测单元采集的牵引力数据低于设定值的下阈值后,控制指令增加牵引机构的输出,以补偿牵引力至设定值;当拉力检测单元采集的牵引力数据超过设定值的上阈值后,控制指令减小牵引机构的输出以使牵引力至设定值牵引机构的输出。
具体的,当颈椎牵引部和腰椎牵引部的牵引力低于设定值的10%(补偿下限)后,控制单元自动补偿牵引力到设定值,超过设定值+50N(补偿上限)后自动退回到设定值,始终控制颈椎牵引部和腰椎牵引部的牵引力在设定值的范围内,保持牵引力均衡。所述控制单元通过继电器调节牵引机构的输出,继电器驱动输出控制电动推杆的进退与停止。
所述控制单元微处理器、与微处理器连接的电源、显示单元及操作单元,所述微处理器通过显示单元显示电动颈腰椎牵引床的工作数据,通过操作单元设置控制指令。
所述显示单元、操作单元分别采用显示器和按键,所述显示器和按键与微处理器连接。
进一步的,所述微处理器连接有声光提示单元,所述声光提示单元可以是声光报警器,当颈椎牵引部和腰椎牵引部的牵引力超过设定值的范围时,发出提示信号,提醒医务人员及时进行相应的处理。
请参阅图1,本发明的另一个实施例中,一种电动颈腰椎牵引床,所述电动颈腰椎牵引床包括如上任一所述的电动颈腰椎牵引床的拉力自动补偿功能系统。
所述电动颈腰椎牵引床的拉力自动补偿功能系统包括拉力检测单元和控制单元,所述控制单元预设有控制电动颈腰椎牵引床的牵引机构的控制指令,当控制指令驱动牵引机构运行时,拉力检测单元采集牵引机构的牵引力数据并反馈给控制单元,控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿;当拉力检测单元采集的牵引力数据高于或低于设定值的阈值后,减小或增加牵引机构的输出,始终控制颈椎牵引部和腰椎牵引部的牵引力在设定值的范围内,保持牵引力均衡;也解决了电动颈腰椎牵引床运行中由于衣服或绑带滑动造成拉力下降、不均衡需要人工手动补力的问题,让电动颈腰椎牵引床运行时更加智能化。
本发明的工作原理:通过设置的拉力检测单元采集牵引机构的牵引力数据,并反馈给控制单元,控制单元根据接收的牵引力数据对控制指令中的设定值进行补偿;补偿后形成新的控制指令自动控制牵引机构;达到合适的牵引功率输出;所述的补偿为:当颈部和腰部连续性牵引和间歇性牵引的拉力低于设定值开始自动补偿拉力到设定值,当牵引力超过设定值则自动退回到设定值,始终控制颈椎牵引部和腰椎牵引部的拉力在设定值的正常范围内,始终保持拉力均衡,让电动颈腰椎牵引床运行时更加智能化。
需要说明的是,本发明所采用的微处理器和力传感器均为现有技术的应用,本专业技术人员能够根据相关的描述实现所要达到的功能,或通过相似的技术实现所需完成的技术特性,在这里就不再详细描述。
本领域技术人员在考虑说明书及实施例处的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由权利要求指出。
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
- 一种电动颈腰椎牵引床及其拉力自动补偿功能系统
- 一种颈腰椎康复治疗用牵引床