半导体检测装置及检测方法
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及半导体制造领域,尤其涉及一种半导体检测装置及检测方法。
背景技术
在半导体制程中,容易因工艺或材料上的缺陷造成器件良率下降,并导致生产成本提高。特别是随着电路关键尺寸的不断缩小,其对工艺控制的要求就越来越严格。
为了能在实际生产过程中及时发现和解决问题,需要对产品进行在线且非破坏性的检测,然后,通过电子显微镜等缺陷观察设备对缺陷进行成像和元素成分的分析。在非破坏性的缺陷检测装置中,光学的缺陷检测装置由于其高灵敏度、以及对批量测试具有良好的适用性,得到了广泛的认可和研究。
然而,现有的光学的缺陷检测装置仍然有待改善。
发明内容
本发明解决的技术问题是提供一种半导体检测装置及检测方法,以改善检测装置。
为解决上述技术问题,本发明的技术方案提供一种半导体检测装置,包括:晶圆承载装置,用于承载待测晶圆;入射光系统,用于向所述待测晶圆发射入射光,所述入射光与第一方向之间具有夹角,所述入射光经所述待测晶圆的反射形成反射光,所述第一方向为垂直于所述待测晶圆表面的法线方向;光学信号分拣系统,用于自所述反射光中分拣出基波光信号;传感系统,用于接收所述基波光信号,并根据所述基波光信号获取位置信息;控制系统,用于接收所述位置信息,并且,根据所述位置信息,在所述第一方向上对所述晶圆承载装置的高度进行调整。
可选的,所述传感系统包括:第一接收模块,用于接收所述基波光信号;位置信号读取模块,用于根据所接收的基波光信号,获取所述位置信息。
可选的,所述控制系统包括:第二接收模块,所述第二接收模块用于接收所述位置信息。
可选的,所述控制系统还包括:第一运算单元,用于根据所述位置信息计算并获取移动信息,所述移动信息包括,所述待测晶圆在第一方向上的高度与预设高度之间的高度差。
可选的,所述控制系统还包括:第一位置控制单元,用于接收所述移动信息,并根据所述移动信息,在所述第一方向上移动所述晶圆承载装置。
可选的,所述控制系统还包括:比较单元,用于当所述位置信息与预设位置信息之间的偏差超出偏差范围时,输出偏移信号。
可选的,所述控制系统还包括:第二位置控制单元,用于根据所述偏移信号在所述第一方向上移动所述晶圆承载装置。
可选的,所述控制系统还包括:反馈单元,用于获取所述晶圆承载装置的移动信息,并向所述入射光系统发送入射光控制信息。
可选的,所述入射光系统包括监控单元,用于获取入射光信息,并将所述入射光信息反馈至所述控制系统,所述入射光信息包括第一光功率;所述传感系统还包括:功率读取模块,用于根据所述基波光信号获取第二光功率,并将所述第二光功率发送至所述控制系统;所述控制系统还包括第二运算单元,用于根据所述第一光功率和第二光功率,获取所述待测晶圆的材料的线性光学特性。
可选的,所述光学信号分拣系统还用于自所述反射光中分拣出谐波光信号;所述控制系统包括缺陷检测单元,用于根据所述谐波光信号获取所述待测晶圆的缺陷信息。
可选的,还包括:谐波信号采集系统,用于获取所述谐波光信号,并将所述谐波光信号传输至所述缺陷检测单元。
可选的,所述光学信号分拣系统包括双色镜,用于通过所述反射光中的所述基波光信号,并将所述反射光中的谐波光信号向所述谐波信号采集系统反射,或者用于通过所述反射光中的谐波光信号,并将所述反射光中的所述基波光信号向所述传感系统反射。
可选的,所述入射光系统包括:光源,用于发射初始入射光;调制单元,用于调制所述初始入射光的光强、偏振参数和焦距中的一者或多者,以发出所述入射光。
可选的,所述晶圆承载装置包括:承载盘,用于承载待测晶圆;设置于所述承载盘的固定装置,用于将待测晶圆固定于所述承载盘;机械移动组件,用于驱动所述承载盘移动。
可选的,所述固定装置为真空吸盘或固定于承载盘边缘的卡扣。
可选的,还包括:聚焦单元,用于将入射光聚焦于所述待测晶圆表面或待测晶圆内。
可选的,还包括:光学准直单元,用于准直所述反射光,并使准直后的反射光入射至所述光学信号分拣系统。
可选的,还包括:转向系统,用于将所述反射光转向,并使转向后的反射光入射至所述光学信号分拣系统。
可选的,所述传感系统包括象限光电探测器。
相应的,本发明的技术方案还提供一种采用上述半导体检测装置进行的检测方法,包括:提供待测晶圆;向所述待测晶圆发射入射光,所述入射光与第一方向之间具有夹角,所述入射光经所述待测晶圆的反射形成反射光,所述第一方向是垂直于晶圆表面的法线方向;获取反射光,并且自所述反射光中分拣出基波光信号;获取所述基波光信号,并根据所述基波光信号获取位置信息;根据所述位置信息,在所述第一方向上调整待测晶圆的高度。
可选的,根据所述位置信息,在所述第一方向上调整待测晶圆的高度的方法包括:根据所述位置信息获取移动信息,所述移动信息包括,所述待测晶圆在第一方向的高度与预设高度之间的高度差;根据所述移动信息,在所述第一方向上移动并调整待测晶圆的高度,直至所述待测晶圆在第一方向的高度与所述预设高度一致。
可选的,根据所述位置信息,在所述第一方向上调整待测晶圆的高度的方法包括:提供预设位置信息和偏差范围;当所述位置信息与预设位置信息之间的偏差超出偏差范围时,输出偏移信号;根据所述偏移信号在所述第一方向上移动并调整待测晶圆的高度。
可选的,根据所述位置信息,在所述第一方向上调整待测晶圆的高度的方法还包括:当所述待测晶圆结束在所述第一方向上的移动后,再次向所述待测晶圆发射入射光。
可选的,所述待测晶圆包括:基底、以及位于所述基底表面的待测层。
可选的,所述入射光具有第一光功率;所述检测方法还包括:获取所述基波光信号的第二光功率;根据所述第一光功率和第二光功率获取所述待测层的线性光学特性。
可选的,还包括:自所述反射光中分拣出谐波光信号;根据所述谐波光信号获取所述待测晶圆的缺陷信息。
与现有技术相比,本发明的技术方案具有以下有益效果:
本发明技术方案提供的半导体检测装置中,一方面,通过光学信号分拣系统和传感系统,能够自经待测晶圆反射形成的反射光中分拣出基波光信号,并根据所述基波光信号获取能够对应待测晶圆的当前高度的位置信息,因此,通过控制系统,能够根据所述位置信息,在所述第一方向上对所述晶圆承载装置的高度进行调整,从而,实现了聚焦过程中,对待测晶圆的高度的监控及调整。另一方面,通过入射光系统,能够向待测晶圆发射出倾斜的入射光,即,入射光与垂直于待测晶圆表面的法线方向之间具有夹角,因此,经待测晶圆的反射形成的反射光也倾斜,即,所述反射光能够与垂直于待测晶圆表面的法线方向之间具有夹角,从而,光学信号分拣系统能够在待测晶圆表面上方以外的位置获取到反射光,并且,光学信号分拣系统根据所述反射光,能够分拣出在待测晶圆表面上方以外的位置传播的基波光信号。由于基波光信号在待测晶圆表面上方以外的位置传播,因此,传感系统能够在接收所述基波光信号,并根据所述基波光信号获取位置信息的同时,设置在待测晶圆表面上方以外的位置,使待测晶圆表面上方的空间更富余。综上,通过所述半导体检测装置,能够在实现监控和调整待测晶圆的高度的同时,使检测待测晶圆高度的传感系统能够设置于待测晶圆表面上方以外的位置,以使待测晶圆表面上方的空间更富余,从而,对半导体检测装置进行了改善。
进一步,由于通过所述监控单元,获取了入射光的第一光功率,通过所述功率读取模块,获取了基波光信号的第二光功率,因此,通过所述控制系统能够通过所述第二运算单元,根据所述第一光功率和第二光功率,获取所述待测晶圆的材料的线性光学特性,从而,通过待测晶圆的材料的线性光学特性,能够为检测待测晶圆的缺陷提供附加信息,提高了缺陷检测的精度。同时,由于根据所述基波光信号获取第二光功率,因此,所述传感系统能够根据同一个入射光,在获取信息位置的同时,获取所述线性光学特性,以提供所述附加信息,从而,提高了缺陷检测的检测效率。
进一步,由于所述光学信号分拣系统还用于自所述反射光中分拣出谐波光信号,所述控制系统还用于根据所述谐波光信号获取所述待测晶圆的缺陷信息,因此,所述半导体检测装置能够根据同一光源,在监控并调整待测晶圆的高度的同时,检测待测晶圆的缺陷,从而,提高了缺陷检测的检测效率。
附图说明
图1至图5是本发明一实施例的半导体检测装置的结构示意图;
图6是本发明又一实施例的半导体检测装置的结构示意图;
图7是本发明另一实施例的半导体检测装置的结构示意图;
图8是本发明一实施例的检测方法的流程示意图。
具体实施方式
如背景技术所述,现有的光学的缺陷检测装置仍然有待改善。
在一个实施例中,提供了一种光学缺陷检测装置,在该光学缺陷检测装置中,通过将高度传感器设置于待测晶圆表面的上方,以检测待测晶圆的高度,从而,根据所检测到的待测晶圆的高度,调整待测晶圆位置,实现聚焦控制。
然而,设置于待测晶圆表面上方的高度传感器占用了晶圆表面上方的有限空间,导致所述光学缺陷检测装置中部件设置的空间局限性较大、自由度低。
为了解决上述问题,本发明提供一种半导体检测装置及检测方法,包括:晶圆承载装置,用于承载待测晶圆;入射光系统,用于向所述待测晶圆发射入射光,所述入射光与第一方向之间具有夹角,所述入射光经所述待测晶圆的反射形成反射光,所述第一方向为垂直于所述待测晶圆表面的法线方向;光学信号分拣系统,用于自所述反射光中分拣出基波光信号;传感系统,用于接收所述基波光信号,并根据所述基波光信号获取位置信息;控制系统,用于接收所述位置信息,并且,根据所述位置信息,在所述第一方向上对所述晶圆承载装置的高度进行调整。从而,实现了对半导体检测装置的改善。
为使本发明的上述目的、特征和有益效果能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
图1至图5是本发明一实施例的半导体检测装置的结构示意图。
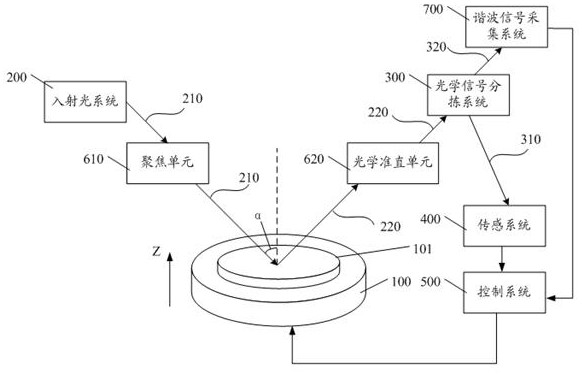
首先,请参考图1,所述半导体检测装置包括:
晶圆承载装置100,用于承载待测晶圆101;
入射光系统200,用于向所述待测晶圆101发射入射光210,所述入射光210与第一方向Z之间具有夹角α,所述入射光210经所述待测晶圆101的反射形成反射光220,所述第一方向Z为垂直于所述待测晶圆101表面的法线方向;
光学信号分拣系统300,用于自所述反射光220中分拣出基波光信号310;
传感系统400,用于接收所述基波光信号310,并根据所述基波光信号310获取位置信息;
控制系统500,用于接收所述位置信息,并且,根据所述位置信息,在所述第一方向Z上对所述晶圆承载装置100的高度进行调整。
一方面,通过光学信号分拣系统300和传感系统400,能够自经待测晶圆101反射形成的反射光220中分拣出基波光信号310,并根据所述基波光信号310获取能够对应待测晶圆101的当前高度的位置信息,因此,通过控制系统500,能够根据所述位置信息,在所述第一方向Z上对所述晶圆承载装置100的高度进行调整,从而,实现了聚焦过程中,对待测晶圆101的高度的监控及调整。另一方面,通过入射光系统200,能够向待测晶圆101发射出倾斜的入射光210,即,入射光210与垂直于待测晶圆101表面的法线方向之间具有夹角α,因此,经待测晶圆101的反射形成的反射光220也倾斜,即,所述反射光220能够与垂直于待测晶圆表面的法线方向之间具有夹角,从而,光学信号分拣系统300能够在待测晶圆101表面上方以外的位置获取到反射光220,并且,光学信号分拣系统300根据所述反射光220,能够分拣出在待测晶圆101表面上方以外的位置传播的基波光信号310。由于基波光信号310在待测晶圆101表面上方以外的位置传播,因此,传感系统400能够在接收所述基波光信号310,并根据所述基波光信号310获取位置信息的同时,设置在待测晶圆101表面上方以外的位置,使待测晶圆101表面上方的空间更富余。综上,通过所述半导体检测装置,能够在实现监控和调整待测晶圆101的高度的同时,使检测待测晶圆101高度的传感系统400能够设置于待测晶圆101表面上方以外的位置,以使待测晶圆101表面上方的空间更富余,从而,对半导体检测装置进行了改善。
以下将结合附图进行详细说明。
请参考图1和图2,所述入射光系统200包括:光源201,用于发射初始入射光211;调制单元202,用于调制所述初始入射光211的光学参数,以发出入射光210,所述入射光210与第一方向Z之间具有夹角α。即,所述入射光210相对于第一方向Z倾斜。
具体的,所述光学参数包括光强、偏振参数和焦距中的一者或多者。
具体的,所夹角α是大于0度且小于90度的角度。具体的夹角大小可以根据对所述半导体检测装置中的部件结构的设置而调整。
具体的,本实施例中,通过所述光源201发射出初始入射光211,接着,通过所述调制单元202对所述初始入射光211的光学参数进行调制,从而,发出所述入射光210。
在其他实施例中,入射光系统不包括调制单元,直接通过光源发射出入射光。
在本实施例中,所述光源201包括激光发射器。所述激光发射器包括脉冲激光器等。
请继续参考图1,所述半导体检测装置还包括:聚焦单元610,用于将入射光210聚焦于所述待测晶圆101表面或待测晶圆101内。
具体的,所述待测晶圆101包括:基底(未图示)、以及位于所述基底表面的待测层(未图示)。
在本实施例中,所述待测层是单层结构。
具体而言,通过所述聚焦单元610,将所述入射光210聚焦于所述待测晶圆101表面,所述入射光210经所述待测晶圆表面的反射形成反射光220。
在其他实施例中,所述待测层是多层结构。
在其他实施例中,待测层为沿第一方向Z排布的多层结构,所述待测层内具有反射面。具体而言,通过聚焦单元,将入射光聚焦于所述待测层内,所述待测层内具有反射面,所述入射光经过所述待测层内反射面的反射形成反射光。所述反射面包括待测层中多层结构之间的分界面,或是待测层中图形化的1个或多个结构的表面等。
需要说明的是,由于聚焦单元610器件性能极限的限制,聚焦时的焦深远大于待测层在第一方向Z上的厚度,因此,传感系统400无论是根据入射光经过待测层表面形成的反射光中的基波光信号,或是根据入射光经过待测层内部形成的反射光中的基波光信号,所获取的位置信息都能够与待测晶圆101当前的高度对应。
在本实施例中,所述待测层为透明材料。
在其他实施例中,待测层的材料还可以同时包括透明材料和非透明材料,或者,待测层的材料为非透明材料。
在本实施例中,所述基底与待测层之间没有其他半导体结构。
在其他实施例中,所述待测晶圆还包括:位于所述基底与待测层之间的半导体层、介质层和互连层中的一者或多者。
在本实施例中,所述聚焦单元610包括聚焦透镜。
在其他实施例中,聚焦单元还可以是曲面镜等。
请继续参考图1,所述半导体检测装置还包括:光学准直单元620,用于准直所述反射光220,并使准直后的反射光220入射至所述光学信号分拣系统300。
通过所述光学准直单元620对所述反射光220的准直,能够提高光学信号分拣系统300获取的反射光220的信号精度,从而,传感系统400获取的位置信息所对应的当前待测晶圆101的高度更准确。
在本实施例中,所述光学准直单元620包括慢轴准直镜和快轴准直镜。
请继续参考图1,所述光学信号分拣系统300还用于自所述反射光220中分拣出谐波光信号320。
在本实施例中,所述控制系统500还包括缺陷检测单元580(如图5所示),用于根据所述谐波光信号320获取所述待测晶圆101的缺陷信息。
由于所述光学信号分拣系统300还用于自所述反射光220中分拣出谐波光信号320,所述控制系统500还包括缺陷检测单元580,用于根据所述谐波光信号320获取所述待测晶圆101的缺陷信息,因此,所述半导体检测装置能够根据同一光源,在监控并调整待测晶圆101的高度的同时,检测待测晶圆101的缺陷,从而,提高了缺陷检测的检测效率。
具体的,本实施例中,在所述反射光220被所述光学准直单元620准直之后,所述光学信号分拣系统300自准直后的反射光220中分拣出基波光信号310和谐波光信号320。
所述谐波光信号320包括:是基波光信号310倍频的二次谐波信号(Frequencydoubled second harmonic generation signal)。
在本实施例中,所述半导体检测装置还包括:谐波信号采集系统700,用于获取所述谐波光信号320,并将所述谐波光信号320传输至控制系统500。
具体而言,在本实施例中,光学信号分拣系统300包括双色镜,用于通过反射光220中的谐波光信号320,并将反射光220中的基波光信号310向所述传感系统400反射。
在另一实施例中,如图7所示,所述光学信号分拣系统301包括双色镜,用于通过反射光220中的所述基波光信号310,并将所述反射光220中的谐波光信号320向所述谐波信号采集系统700反射。
通过选择采用图1的光学信号分拣系统300或图7所示实施例中的光学信号分拣系统301,能够使被分拣出的基波光信号310和谐波光信号320的传播方向更灵活,因此,提高了传感系统400以及谐波信号采集系统700在半导体检测装置中的位置灵活性,从而,提高了半导体检测装置结构设计的灵活性。
在另一实施例中,如图7所示,所述半导体检测装置还包括:转向系统800,用于将所述反射光220转向,并使转向后的反射光220入射至所述光学信号分拣系统301。通过在所述半导体检测装置中设置所述转向系统,使得反射光220的光路设置更灵活。因此,一方面,提高了传感系统400以及谐波信号采集系统700在半导体检测装置中的位置灵活性;另一方面,也能够使得半导体检测装置的结构更为紧凑,实现了半导体检测装置的小型化。具体的,所述转向系统包括若干反射镜。
在其他实施例中,光学信号分拣系统还包括偏振器,用于通过谐波光信号中具有预设偏振参数的非线性光信号,以增加缺陷检测的类型,在实现监控和调整待测晶圆的高度、并提高缺陷检测的检测效率的同时,提高了半导体检测装置的检测灵敏度。
请参考图3,所述传感系统400包括:第一接收模块410,用于接收所述基波光信号310;位置信号读取模块420,用于根据所接收的基波光信号310,获取位置信息。
在本实施例中,所述第一接收模块410包括信号接收面(未图示),所述基波光信号310被信号接受面接收,所述位置信息是一个在平面坐标系中的2维坐标,所述平面坐标系所在的平面为所述信号接收面。通过所述位置信息,能够对应所述待测晶圆101当前在第一方向Z的高度H。
具体而言,请结合参考图1、图3和图4,图4是待测晶圆101分别在高度H
当待测晶圆101在不同的高度H时,以图4所示的高度H
在本实施例中,所述传感系统400包括象限光电探测器。
请结合参考图1和图5,所述控制系统500包括:第二接收模块510,用于接收所述位置信息。
在本实施例中,所述控制系统500还包括:第一运算单元520,用于根据所述位置信息计算并获取移动信息A,所述移动信息A包括,所述待测晶圆101在第一方向Z上的高度H与预设高度之间的高度差。
具体的,所述控制系统500中预存有所述位置信息和高度H的对应关系信息,所述对应关系信息包括对应模型等。在获取所述位置信息后,所述第一运算单元520能够根据所述对应关系信息进行运算,获取所述待测晶圆101在第一方向Z上的高度H与预设高度之间的高度差,即,所述移动信息A。
在本实施例中,所述控制系统500还包括:第一位置控制单元530,用于接收所述移动信息A,并根据所述移动信息A,在所述第一方向Z上移动所述晶圆承载装置100,以在所述第一方向Z上对所述晶圆承载装置100的高度进行调整,实现对待测晶圆101的高度H的调整。
在又一实施例中,请参考图6,所述控制系统500还包括:比较单元550,用于当所述位置信息与预设位置信息之间的偏差超出偏差范围时,输出偏移信号;第二位置控制单元560,用于根据所述偏移信号在所述第一方向Z上移动所述晶圆承载装置100。
具体的,在所述控制系统500接收所述位置信息后,通过所述比较单元550,对所述位置信息和预设位置信息进行比较,所述预设位置信息与待测晶圆101预设高度对应。当所述位置信息和所述预设位置信息之间的偏差超出偏差范围时,所述比较单元550输出偏移信号。所述第二位置控制单元560在接收到所述偏移信号之后,控制所述晶圆承载装置100在所述第一方向Z上朝向待测晶圆的预设高度移动。
在又一实施例中,请继续参考图6,所述控制系统500还包括:反馈单元570,用于获取所述晶圆承载装置100的移动信息,并向所述入射光系统200发送入射光控制信息。
具体的,所述移动信息包括所述晶圆承载装置100在所述第一方向Z上的移动情况,所述移动情况包括:移动或停止。当所述晶圆承载装置100停止朝向待测晶圆的预设高度的移动时,所述反馈单元向所述入射光系统200发送入射光控制信息,使所述入射光系统200再次发射入射光210。从而,通过若干次控制所述晶圆承载装置100在所述第一方向Z上,朝向待测晶圆的预设高度移动之后,实现对待测晶圆101的高度H的调整,使所述待测晶圆101位于预设高度。
请继续参考图2、图3和图5,所述入射光系统200还包括监控单元203,用于根据入射光210获取入射光信息,并将所述入射光信息反馈至所述控制系统500,所述入射光信息包括第一光功率;所述传感系统400还包括:功率读取模块430,用于根据所述基波光信号310获取第二光功率,并将所述第二光功率发送至所述控制系统500;所述控制系统500还包括第二运算单元540,用于根据所述第一光功率和第二光功率,获取所述待测晶圆101的材料的线性光学特性。
由于通过所述监控单元203,获取了入射光210的第一光功率,通过所述功率读取模块430,获取了基波光信号310的第二光功率,因此,通过所述控制系统400能够通过所述第二运算单元540,根据所述第一光功率和第二光功率,获取所述待测晶圆101的材料的线性光学特性,从而,通过待测晶圆101的材料的线性光学特性,能够为检测待测晶圆101的缺陷提供附加信息,提高了缺陷检测的精度。同时,由于根据所述基波光信号310获取第二光功率,因此,所述传感系统400能够根据同一个入射光210,在获取信息位置的同时,获取所述线性光学特性,以提供所述附加信息,从而,提高了缺陷检测的检测效率。
具体而言,本实施例中,所述控制系统500在获取所述第一光功率和第二光功率后,通过所述第二运算单元540,能够根据第二光功率与第一光功率的比值,获取所述待测层的线性光学反射率。
在本实施例中,所述半导体检测装置还包括:成像单元(未图示),用于获取待测晶圆101表面不同位置的成像图案。
在本实施例中,所述控制系统还包括:成像运算单元(未图示),用于根据待测晶圆101表面不同位置的成像图案,获取所述待测晶圆101在基准平面的平面位置信息,所述基准平面与所述待测晶圆101表面平行;第三位置控制单元(未图示),用于根据所述平面位置信息,沿平行于基准平面的方向移动所述晶圆承载装置100,以实现所述待测晶圆101在平行于基准平面的方向上的对准。
具体的,当成像单元获取待测晶圆101表面不同位置的成像图案后,所述成像运算单元能够通过所述成像图案获取待测晶圆101在基准平面的平面位置信息,进而控制晶圆承载装置100移动到所需位置以在平行于基准平面的方向上进行对准。
在本实施例中,所述晶圆承载装置包括:承载盘(未图示),用于承载待测晶圆101;设置于所述承载盘的固定装置(未图示),用于将待测晶圆101固定于所述承载盘;机械移动组件(未图示),用于驱动所述承载盘移动。所述机械移动组件能够根据所述控制系统500提供的信息移动所述承载盘至指定的位置。具体的,所述固定装置为真空吸盘或固定于承载盘边缘的卡扣。
相应的,本发明一实施例还提供一种采用上述半导体检测装置进行检测的检测方法,请参考图8,包括:
步骤S1,提供待测晶圆;
步骤S2,向所述待测晶圆发射入射光,所述入射光与第一方向之间具有夹角,所述入射光经所述待测晶圆的反射形成反射光,所述第一方向是垂直于晶圆表面的法线方向;
步骤S3,获取反射光,并且自所述反射光中分拣出基波光信号;
步骤S4,获取所述基波光信号,并根据所述基波光信号获取位置信息;
步骤S5,根据所述位置信息,在所述第一方向上调整待测晶圆的高度。
一下将结合附图进行详细说明。
请结合参考图1和图8,提供待测晶圆101。
具体的,所述待测晶圆101包括:基底(未图示)、以及位于所述基底表面的待测层(未图示)。
在本实施例中,所述待测层是单层结构。
在其他实施例中,所述待测层是多层结构。
在其他实施例中,待测层为沿第一方向Z排布的多层结构,所述待测层内具有反射面。
在本实施例中,所述待测层为透明材料。
在其他实施例中,待测层的材料还可以同时包括透明材料和非透明材料,或者,待测层的材料为非透明材料。
在本实施例中,所述基底与待测层之间没有其他半导体结构。
在其他实施例中,所述待测晶圆还包括:位于所述基底与待测层之间的半导体层、介质层和互连层中的一者或多者。
请结合参考图1、图2和图8,向所述待测晶圆101发射入射光210,所述入射光210与第一方向Z之间具有夹角α,所述入射光210经所述待测晶圆101的反射形成反射光220。
具体的,所夹角α是大于0度且小于90度的角度。
在本实施例中,发出所述入射光210的方法包括:发射出初始入射光211;调制所述初始入射光211的光学参数,以发出入射光210。
具体的,所述光学参数包括光强、偏振参数和焦距中的一者或多者。
在其他实施例中,也可以不经过调制直接发射出入射光。
在本实施例中,所述检测方法还包括:将入射光210聚焦于所述待测晶圆101表面或待测晶圆101内。
具体的,本实施例中,将所述入射光210聚焦于所述待测晶圆101表面,所述入射光210经所述待测层表面的反射形成反射光220。
在其他实施例中,将入射光聚焦于所述待测层内,所述入射光经过所述待测层内的反射面的反射形成反射光。
请结合参考图1和图3,自所述反射光220中分拣出基波光信号310。
在本实施例中,所述检测方法还包括:自所述反射光220中分拣出谐波光信号320。
具体的,在本实施例中,自所述反射光220中分别分拣出基波光信号310和谐波光信号320的方法包括:通过反射光220中的谐波光信号320,并将反射光220中的基波光信号310反射。
在另一实施例中,请结合参考图7,自所述反射光220中分别分拣出基波光信号310和谐波光信号320的方法包括:通过反射光220中的所述基波光信号310,并将所述反射光220中的谐波光信号320反射。
所述谐波光信号320包括:是基波光信号310倍频的二次谐波信号。
在其他实施例中,所述检测方法还包括:对所述谐波光信号偏振,形成具有预设偏振参数的非线性光信号。
在本实施例中,所述检测方法还包括:在自所述反射光220中分拣出基波光信号310之前,准直所述反射光220。
准直所述反射光220的方法包括快轴准直和慢轴准直。
在另一实施例中,请结合参考图7,所述检测方法还包括:将所述反射光220转向。
请结合参考图1、图4和图5,获取所述基波光信号310,并根据所述基波光信号310获取位置信息。
具体而言,在本实施例中,所述位置信息是基波光信号310的质心一个在平面坐标系中的2维坐标。
以图4所示的高度H
请结合参考图1和图5,根据所述位置信息,在所述第一方向Z上调整待测晶圆101的高度H。
在本实施例中,根据所述位置信息,在所述第一方向Z上调整待测晶圆101的高度H的方法包括:根据所述位置信息计算并获取移动信息A,所述移动信息A包括,所述待测晶圆101在第一方向Z上的高度H与预设高度之间的高度差;根据所述移动信息A,在所述第一方向Z上移动并调整待测晶圆101的高度,直至所述待测晶圆101在第一方向Z的高度H与所述预设高度一致。从而,实现对待测晶圆101的高度H的调整。
具体的,提供所述位置信息和待测晶圆101的高度H的对应关系信息,所述对应关系信息包括对应模型等。在获取所述位置信息后,根据所述对应关系信息进行运算,获取所述待测晶圆101在第一方向Z上的高度H与预设高度之间的高度差,即,所述移动信息A。接着,根据所述移动信息A,在所述第一方向Z上移动待测晶圆101。
在又一实施例中,请结合参考图6,根据所述位置信息,在所述第一方向Z上调整待测晶圆101的高度H的方法包括:提供预设位置信息和偏差范围;当所述位置信息与预设位置信息之间的偏差超出偏差范围时,输出偏移信号;根据所述偏移信号在所述第一方向Z上移动并调整待测晶圆101的高度H。
在又一实施例中,请继续结合参考图6,根据所述位置信息,在所述第一方向Z上调整待测晶圆101的高度H的方法还包括:当所述待测晶圆101结束在所述第一方向Z上的移动后,再次向所述待测晶圆101发射入射光。从而,通过若干次对待测晶圆101的高度H的调整,使所述待测晶圆101到达预设高度。
在本实施例中,所述检测方法还包括:根据所述谐波光信号320获取所述待测晶圆101的缺陷信息。
请继续结合参考图2、图3和图5,所述入射光具有第一光功率;所述检测方法还包括:获取所述基波光信号310的第二光功率;根据所述第一光功率和第二光功率获取所述待测层的线性光学特性。
具体而言,在获取所述第一光功率和第二光功率后,能够根据第二光功率与第一光功率的比值,获取所述待测层的线性光学反射率。
在本实施例中,所述检测方法还包括:获取待测晶圆101表面不同位置的成像图案;根据待测晶圆101表面不同位置的成像图案,获取所述待测晶圆101在基准平面的平面位置信息,所述基准平面与所述待测晶圆101表面平行;根据所述平面位置信息,沿平行于基准平面的方向移动所述待测晶圆101,以使所述待测晶圆101在平行于基准平面的方向上的对准。
虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
- 缺陷检测装置、缺陷检测方法、晶片、半导体芯片、半导体装置、裸片接合机、接合方法、半导体制造方法、以及半导体装置制造方法
- 缺陷检测装置、缺陷检测方法、裸片接合机、半导体制造方法、以及半导体装置制造方法