搅拌机器人
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及搅拌设备,尤其涉及一种搅拌机器人。
背景技术
现有的养鸡场槽道内粪便搅拌,采用单电机驱动,同时完成行走及搅拌动作,没有状态变换功能,具体地设备无法实现上下槽道,因此整个设备基本沉入地面以下,进入槽道搅拌,不具备更换槽道工作的能力,由此每条槽道要用一台设备,多条槽道要多台设备,总的费用成本非常高。
发明内容
针对上述技术问题,本发明实施例提供了一种搅拌机器人,可在行走槽道中行走,所述行走槽道下沉于地面设置,其特征在于,所述搅拌机器人包括:
行走装置,包括基座、主轴和辊轮,所述主轴设于所述基座上,至少部分所述辊轮与所述主轴连接,所述辊轮沿所述行走槽道的导轨滚动;
搅拌装置,包括:
支架;
搅拌机构,设于所述支架上,包括若干可旋转的搅拌单元;
驱动机构,安装于所述支架上;
以及动力机构,包括:
第一驱动单元和第一传动组件,所述第一驱动单元安装于所述支架上,所述第一传动组件传动连接所述第一驱动单元与所述主轴;
第二驱动单元和第二传动组件,所述第二驱动单元安装于所述支架上,所述第二传动组件传动连接副轴与所述支架,所述副轴设置于所述基座上,所述第二传动组件带动所述支架围绕主轴轴线转动;
和第三传动组件,传动连接所述主轴和所述搅拌机构。
进一步地,所述第一传动组件包括设于所述驱动机构输出端的第一齿轮、设于所述主轴上的第二齿轮、以及传动连接所述第一齿轮和所述第二齿轮的第一链条。
进一步地,所述第二传动组件包括动力传动组件,所述动力传动组件包括:
第三齿轮,设于所述第二驱动单元输出端;
第四齿轮,设于所述副轴上;
以及第二链条,传动连接所述第三齿轮和所述第四齿轮。
进一步地,所述第二传动组件还包括旋转传动组件,所述旋转传动组件包括:
第五齿轮,设于所述副轴上,与所述第四齿轮同步转动;
第六齿轮,设于所述基座上;
第三链条,传动连接所述第五齿轮和所述第六齿轮;
以及弧形齿条,设于所述支架上,与所述第六齿轮啮合。
进一步地,所述副轴套设于所述主轴上,所述第一驱动单元和所述第二驱动单元分别为设于所述支架上的电机。
进一步地,所述搅拌装置还包括搅拌轴,所述搅拌单元设于所述搅拌轴上;
所述第三传动组件包括设于所述主轴上的第七齿轮、设于所述搅拌轴上的第八齿轮,以及传动连接所述第七齿轮和所述第八齿轮的第四链条。
进一步地,所述搅拌单元包括轴向和径向间隔设置于所述搅拌轴上的弧形钉齿。
进一步地,还包括限位机构,包括设于所述基座上的后退传感器和停止传感器;
所述行走槽道的两端分别设有与所述后退传感器和所述停止传感器对应的限位柱。
进一步地,所述基座上底部还设有若干万向轮。
进一步地,还包括控制装置,所述控制装置设于所述支架上,用于供用户操作以控制各个机构运作。
本发明的搅拌机器人解决了现有搅拌机的不可移动、不可更换槽道的缺点。具备形状变形能力,即需要进入槽道时可以沉入地面工作,需要拖出移动更换槽道时可以升到地面上。由此在整个工作场所最少只需要一台就可以完成所有行走槽道的搅拌工作。
附图说明
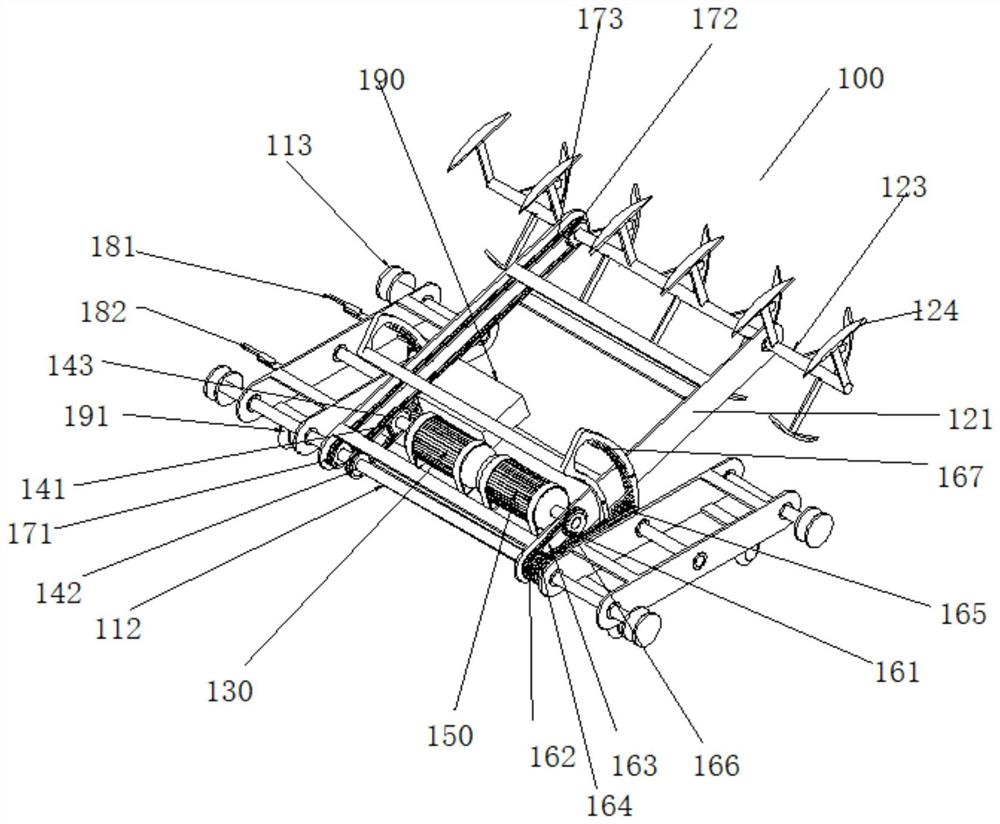
图1为本发明实施例中搅拌机器人的结构示意图;
图2为本发明的搅拌机器人处于抬起状态时的结构示意图;
图3为本发明的搅拌机器人处于放下状态时的结构示意图;
图4为图1中搅拌机器人行走装置的结构示意图;
图5为图1中搅拌机器人搅拌装置的结构示意图;
图6为本发明的行走槽道的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-3,本发明实施例中的搅拌机器人100,可在行走槽道200中行走,所述行走槽道200下沉于地面300设置。
行走槽道200内有搅拌对象400,本实施方式中的搅拌对象为粪便。
其中所述搅拌机器人100包括行走装置110和搅拌装置120。如图6所示,行走槽道200的两侧分别设有轨道210,其中在行走槽道200的一侧还设置有电源线220和电源线滑动轨道230,其中电源线220用于为搅拌机器人100供电,电源线滑动轨道230用于供电源线220移动,防止电源线220在移动过程中缠绕影响正常工作。
具体地,如图4所示,行走装置110包括基座111、主轴112和辊轮113,所述主轴112设于所述基座111上,基座111可采用钣金结构。至少部分所述辊轮113与所述主轴112连接,所述辊轮113沿所述行走槽道200的导轨210滚动。本实施方式中辊轮113设有四个,其中两个设置于主轴112上由主轴112驱动旋转,为主动辊轮,另外两个设置于基座111上,为从动辊轮。
本发明实施方式的搅拌机器人还包括控制装置190,所述控制装置190设于所述支架121上,控制装置190包括用于供用户操作以控制各个机构运作的操作部件,例如触控屏、键盘、按钮中的一种或多种。
当然,作为可替换的实施方式,也可采用遥控控制,此时操作部件可以为遥控器,采用433M无线模块实现遥控器与控制装置190之间的无线通讯,控制搅拌机器人的前进、暂停、后退、抬起和放下,当然操作部件也可以为平板电脑或者手机。
其中如图5所示,搅拌装置120包括支架121、搅拌机构122以及动力机构。
搅拌机构122设于所述支架121上,支架121也可采用钣金结构。搅拌机构122包括若干可旋转的搅拌单元;动力机构包括第一驱动单元130、第一传动组件140、第二驱动单元150、第二传动组件160和第三传动组件170。
其中所述第一驱动单元130安装于所述支架121上,所述第一传动组件140传动连接所述第一驱动单元130与所述主轴112;所述第一传动组件140包括设于所述第一驱动单元130输出端的第一齿轮141、设于所述主轴112上的第二齿轮142、以及传动连接所述第一齿轮141和所述第二齿轮142的第一链条143。
第二驱动单元150安装于所述支架121上,第二传动组件160传动连接副轴170与所述支架121,所述副轴170设置于所述基座111上,所述第二传动组件160带动所述支架121围绕主轴的轴线转动。
其中所述第二传动组件160包括动力传动组件和旋转传动组件,所述动力传动组件包括第三齿轮161、第四齿轮162和第二链条163,其中第三齿轮161设于所述第二驱动单元150的输出端;第四齿轮162设于所述副轴170上并与副轴170同步转动;第二链条163传动连接所述第三齿轮161和所述第四齿轮162。
所述旋转传动组件包括第五齿轮164、第六齿轮165、第三链条166以及弧形齿条167,第五齿轮164设于所述副轴170上,第五齿轮164与所述第四齿轮162同步转动;第六齿轮165设于所述基座111上;第三链条166传动连接所述第五齿轮164和所述第六齿轮165;弧形齿条167设于所述支架121上并与所述第六齿轮165啮合。
其中所述副轴170套设于所述主轴112上,所述第一驱动单元130和所述第二驱动单元150分别为设于所述支架121上的电机。
本发明实施方式的所述搅拌装置120还包括搅拌轴123,所述搅拌单元设于所述搅拌轴123上。所述搅拌单元包括轴向和径向间隔设置于所述搅拌轴123上的弧形钉齿124。
第三传动组件170传动连接所述主轴112和所述搅拌机构122。所述第三传动组件170包括第七齿轮171、第八齿轮172以及第四链条173,其中第七齿轮171设于所述主轴112上,第八齿轮172设于所述搅拌轴123上,第四链条173传动连接所述第七齿轮171和所述第八齿轮172。
本发明实施方式的搅拌机器人还包括限位机构,限位机构包括设于所述基座111上的后退传感器181和停止传感器182;所述行走槽道200的两端分别设有与所述后退传感器181和所述停止传感器182对应的第一限位柱183和第二限位柱184,其中后退传感器181和停止传感器182均为压力传感器,当后退传感器181碰触到检测限位柱183时,触发后退信号,控制装置190控制作为第一驱动单元的电机反转。
所述基座111上底部还设有若干万向轮191,用于将基座111拖离行走槽道200时在地面行走。
本发明实施方式的搅拌机器人,工作过程如下:
推动搅拌机器人至行走槽道200内的轨道210上,插上电线,用户操控控制装置190使搅拌部放下,即可开始工作。
行走时,第一驱动单元130驱动第一齿轮141转动,第一齿轮141通过第一链条143带动第二齿轮142转动,从而带动主轴121转动,由此辊轮113转动实现了搅拌机器人在轨道210上的行走。
搅拌机器人开始从起点前进,当到达另一端时,后退传感器181触碰第一限位柱183,后退传感器181向控制装置190发送后退信号,控制装置190控制第一驱动单元130反转,实现后退。
当搅拌机器人后退至起点时,停止传感器182触碰第二限位柱184,停止传感器182向控制装置190发送停止信号,控制装置190控制第一驱动单元130停止运转,实现搅拌机器人的停止。
其中当搅拌部抬起时,用户操作控制装置190控制第二驱动单元150正转驱动第三齿轮161转动,第三齿轮161通过第二链条163带动第四齿轮162转动,由此副轴180转动,带动第五齿轮164转动,第五齿轮164通过第三链条166带动第六齿轮165转动,从而带动弧形齿条167逆时针转动,实现了搅拌部的抬起;
当搅拌部放下时,用户操作控制装置190控制第二驱动单元150反转,由此实现弧形齿条167的顺时针转动,实现搅拌部的放下。
本发明的搅拌机器人解决了现有搅拌机的不可移动、不可更换槽道的缺点。具备形状变形能力,即需要进入槽道时可以沉入地面工作,需要拖出移动更换槽道时可以升到地面上。由此在整个工作场所最少只需要一台就可以完成所有行走槽道的搅拌工作。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种抛撒搅拌式混凝土搅拌机器人
- 一种旋转式偏摆高速轴流搅拌机器人的搅拌方法