一种上肢康复训练机器人
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及康复训练机器人领域,具体来说,涉及一种上肢康复训练机器人。
背景技术
目前,一些外科大手术后不能下床的患者及一些重病需要长期卧床的患者,因手术导致的切口疼痛或因病情较重卧床时间较长,身体各部位得不到应有的锻炼,不仅会影响患者的康复,还会因肌肉长时间得不到锻炼而引起废用性肌肉萎缩、上肢功能性减退。
目前国内基于“智能机器人+肢康复训练”的市场还在发展阶段,多数功能单一,仅仅只有语音交流、互动娱乐等功能,并不能够时刻关注针对的身体健康并给予反馈,康复、护理、陪伴型上肢康复机器人未被大规模普及。
发明内容
针对相关技术中的问题,本发明提出一种上肢康复训练机器人,以克服现有相关技术所存在的上述技术问题。
本发明的技术方案是这样实现的:
一种上肢康复训练机器人,包括壳体和固定于壳体底部的底架以及安装在壳体中部正面的显示屏,壳体的顶面通过插销与盖板连接,并且所述壳体上加工有容纳训练设备的槽口,所述训练设备下降收入槽口内,所述盖板用于覆盖在训练设备上并密封槽口的边沿,所述盖板绕插销旋转打开槽口,所述训练设备上升裸露在壳体的外部;
所述壳体上还安装有激光感知设备,所述激光感知设备用于感知人体温度,驱动壳体上的轮毂电机工作移动至人体旁边。
进一步地,训练设备包括动力机构、气囊夹紧机构和导向框架,所述导向框架的一端安装在动力机构上,所述气囊夹紧机构安装在导向框架上,所述动力机构用于驱动导向框架往复移动,并且所述气囊夹紧机构内置的压力传感器与手面接触则工作,夹持手部;
所述动力机构包括动力壳、滑轨、滑块、导向杆和往复气缸,所述动力壳的底面上沿长度方向加工条形槽,所述滑轨和往复气缸固定在动力壳的顶壁上,所述滑块卡在滑轨上移动,所述滑块上固定的导向杆穿出条形槽与导向框架相接,所述往复气缸的活塞杆与导向杆的侧面固定;
所述导向框架包括支柱、主架、支架和手部包覆筒,支柱的一端固定在动力壳的侧壁上,支柱另一端口上连接的转销与主架的一端活动连接,主架的另一端通过转销与支架相接,并且支架固定在手部包覆筒上,手部包覆筒的外壁与导向杆的端口相接;
所述气囊夹紧机构包括气泵、气囊和通气管,气泵固定在手部包覆筒的外壁上,通气管的一端与气泵相接,通气管的另一端沿着手部包覆筒与气囊相接,气囊分布在手部包覆筒的内壁上。
进一步地,壳体内安装的电路板上分别锡焊有软件控制层和电路层,软件控制层包括人机交互、语音识别模块和人脸识别模块;
所述电路层包括工控机、驱动模块和无线模块,其中工控机与驱动模块相接,驱动模块和人机交互相接,驱动模块的输入端与无线模块相接,无线模块的输出端分别与语音识别模块和人脸识别模块相接,工控机用于控制驱动模块工作,驱动模块接收显示屏的人机交互指令,或在显示屏上显示数据。
进一步地,驱动模块的输出端分别与激光感知设备、轮毂电机、往复气缸和气泵相接,用于分别驱动激光感知设备、轮毂电机、往复气缸和气泵工作。
进一步地,激光感知设备包括摄像头、超声测距传感器和红外人体传感器,语音识别模块内置的麦克风阵列和音箱,能够获取环境中的语音信息,并能够让机器人发出声音,与客户建立交互,并且超声测距传感器和红外人体传感器实时感应人体温度以及机器人与人体之间的距离,摄像头扫描人体角度,并且发送至工控机上,工控机接收位置信号与人体角度,与设定的距离阈值对比,当距离大于设置值,则轮毂电机驱动滚轮移动至设定位置后,做圆周运动直至朝向人脸位置停止。
进一步地,动力壳上连接有插入壳体的自动升降杆,并且自动升降杆受控于驱动模块。
上述技术方案具有如下优点或者有益效果:
1、本发明提供了一种上肢康复训练机器人,语音识别模块内置的麦克风阵列和音箱,能够获取环境中的语音信息,并能够让机器人发出声音,与客户建立交互,并且超声测距传感器和红外人体传感器实时感应人体温度以及机器人与人体之间的距离,摄像头扫描人体角度,并且发送至工控机上,工控机接收位置信号与人体角度,与设定的距离阈值对比,当距离大于设置值,则轮毂电机驱动滚轮移动至设定位置后,做圆周运动直至朝向人脸位置停止,在业务处理过程中,机器人也能够不断收集客户的相关数据,更新丰富数据库中的相关数据。
2、本发明提供了一种上肢康复训练机器人,在机器人移动至患者一旁时,训练设备上升裸露在壳体的外部,并且向上顶出盖板,将气囊夹紧机构露出壳体,患者将上肢插入导向框架之间,手部插入手部包覆筒内,在与气囊上的压力传感器发生接触后,压力传感器将压力信号发送至工控机,工控机则 控制驱动模块动作,发送的控制信号在0.5ms内传递至气泵上,则气泵接受指令,向气囊内充气将手部包覆住,并且手臂部分与导向框架绑带缠绕,通过语音输入发送指令,语音识别模块识别“开始”的指令后,往复气缸来回伸缩,这时用带动上肢往复移动,达到辅助治疗患者上肢的目的,让患者上肢能够得到足够的训练。
3、本发明提供了一种上肢康复训练机器人,激光感知设备包括摄像头、超声测距传感器和红外人体传感器,语音识别模块内置的麦克风阵列和音箱,能够获取环境中的语音信息,并能够让机器人发出声音,与客户建立交互,并且超声测距传感器和红外人体传感器实时感应人体温度以及机器人与人体之间的距离,摄像头扫描人体角度,并且发送至工控机上,工控机接收位置信号与人体角度,与设定的距离阈值对比,当距离大于设置值,则轮毂电机驱动滚轮移动至设定位置后,做圆周运动直至朝向人脸位置停止,在业务处理过程中,机器人也能够不断收集客户的相关数据,更新丰富数据库中的相关数据。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
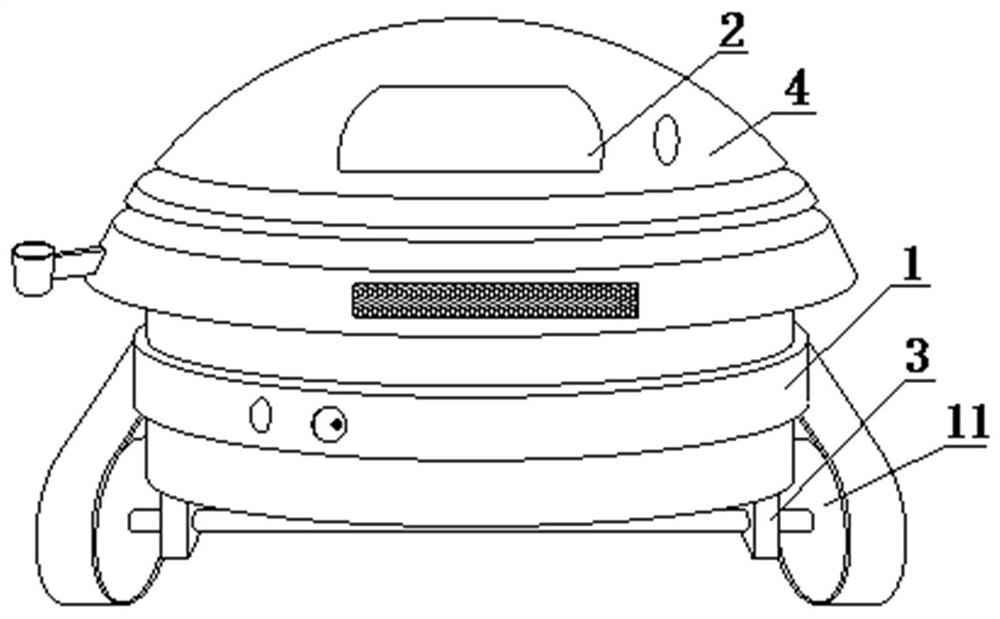
图1是根据本发明实施例的上肢康复训练机器人的盖板封闭状态图;
图2是根据本发明实施例的上肢康复训练机器人的盖板打开状态图;
图3是根据本发明实施例的上肢康复训练机器人的训练设备立体图;
图4是根据本发明实施例的上肢康复训练机器人的动力机构剖面图;
图5是根据本发明实施例的上肢康复训练机器人的气囊夹紧机构结构图;
图6是根据本发明实施例的上肢康复训练机器人的工作原理图。
图中:
1、壳体;11、轮毂电机;12、软件控制层;121、人机交互;122、语音识别模块;123、人脸识别模块;13、电路层;131、工控机;132、驱动模块;133、无线模块;2、显示屏;3、底架;4、盖板;5、训练设备;51、动力机构;511、动力壳;5111、条形槽;512、滑轨;513、滑块;514、导向杆;515、往复气缸;52、气囊夹紧机构;521、气泵;522、气囊;523、通气管;53、导向框架;531、支柱;532、主架;533、支架;534、手部包覆筒;6、激光感知设备。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
参阅附图1-6所示一种上肢康复训练机器人,包括壳体1和固定于壳体1底部的底架3以及安装在壳体1中部正面的显示屏2,壳体1的顶面通过插销与盖板4连接,并且壳体1上加工有容纳训练设备5的槽口,训练设备5下降收入槽口内,盖板4用于覆盖在训练设备5上并密封槽口的边沿,盖板4绕插销旋转打开槽口,训练设备5上升裸露在壳体1的外部;
壳体1上还安装有激光感知设备6,激光感知设备6用于感知人体温度,驱动壳体1上的轮毂电机11工作移动至人体旁边。
在上述实施例中,训练设备5包括动力机构51、气囊夹紧机构52和导向框架53,导向框架53的一端安装在动力机构51上,气囊夹紧机构52安装在导向框架53上,动力机构51用于驱动导向框架53往复移动,并且气囊夹紧机构52内置的压力传感器与手面接触则工作,夹持手部。
在上述实施例中,动力机构51包括动力壳511、滑轨512、滑块513、导向杆514和往复气缸515,动力壳511的底面上沿长度方向加工条形槽5111,滑轨512和往复气缸515固定在动力壳511的顶壁上,滑块513卡在滑轨512上移动,滑块513上固定的导向杆514穿出条形槽5111与导向框架53相接,往复气缸515的活塞杆与导向杆514的侧面固定;导向框架53包括支柱531、主架532、支架533和手部包覆筒534,支柱531的一端固定在动力壳511的侧壁上,支柱531另一端口上连接的转销与主架532的一端活动连接,主架532的另一端通过转销与支架533相接,并且支架533固定在手部包覆筒534上,手部包覆筒534的外壁与导向杆514的端口相接;气囊夹紧机构52包括气泵521、气囊522和通气管523,气泵521固定在手部包覆筒534的外壁上,通气管523的一端与气泵521相接,通气管523的另一端沿着手部包覆筒534与气囊522相接,气囊522分布在手部包覆筒534的内壁上。
在上述实施例中,在机器人移动至患者一旁时,训练设备5上升裸露在壳体1的外部,并且向上顶出盖板4,将气囊夹紧机构52露出壳体1,患者将上肢插入导向框架53之间,手部插入手部包覆筒534内,在与气囊522上的压力传感器发生接触后,压力传感器将压力信号发送至工控机131,工控机131则 控制驱动模块132动作,发送的控制信号在0.5ms内传递至气泵521上,则气泵521接受指令,向气囊522内充气将手部包覆住,并且手臂部分与导向框架53绑带缠绕,通过语音输入发送指令,语音识别模块122识别“开始”的指令后,往复气缸515来回伸缩,这时用带动上肢往复移动,达到辅助治疗患者上肢的目的,让患者上肢能够得到足够的训练。
在上述实施例中,壳体1内安装的电路板上分别锡焊有软件控制层12和电路层13,软件控制层12包括人机交互121、语音识别模块122和人脸识别模块123;电路层13包括工控机131、驱动模块132和无线模块133,其中工控机131与驱动模块132相接,驱动模块132和人机交互121相接,驱动模块132的输入端与无线模块133相接,无线模块133的输出端分别与语音识别模块122和人脸识别模块123相接,工控机131用于控制驱动模块132工作,驱动模块132接收显示屏2的人机交互121指令,或在显示屏2上显示数据。
在上述实施例中,驱动模块132的输出端分别与激光感知设备6、轮毂电机11、往复气缸515和气泵521相接,用于分别驱动激光感知设备6、轮毂电机11、往复气缸515和气泵521工作,激光感知设备6从而实现自主导航和自动巡视功能。
在上述实施例中,激光感知设备6包括摄像头、超声测距传感器和红外人体传感器,语音识别模块122内置的麦克风阵列和音箱,能够获取环境中的语音信息,并能够让机器人发出声音,与客户建立交互,并且超声测距传感器和红外人体传感器实时感应人体温度以及机器人与人体之间的距离,摄像头扫描人体角度,并且发送至工控机131上,工控机131接收位置信号与人体角度,与设定的距离阈值对比,当距离大于设置值,则轮毂电机11驱动滚轮移动至设定位置后,做圆周运动直至朝向人脸位置停止,在业务处理过程中,机器人也能够不断收集客户的相关数据,更新丰富数据库中的相关数据。
在上述实施例中,动力壳511上连接有插入壳体1的自动升降杆,并且自动升降杆受控于驱动模块132。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种上肢康复训练机器人及上肢康复训练方法
- 上肢康复训练机器人的康复训练方法及其康复训练系统