配准探针、用于测量软骨厚度的系统与方法
文献发布时间:2023-06-19 10:18:07
技术领域
本发明涉及一种配准探针、一种具有该配准探针的尤其是用于测量软骨厚度的系统以及一种用于测量软骨厚度的方法。
背景技术
在医学领域中,影像导航常被用于指引医生进行手术。作为一种导航辅助器械,已知配准探针,其用于手术导航中,将现实空间中测量得到的三维坐标点,准确导入导航追踪仪所处虚拟三维坐标中。
在配准探针表面,一般固接有若干个靶标(十字靶标,反光球,反光盘等类型),通过将导航追踪仪发射的光束(或外部光束,如自然光)反射回导航仪中的相机模块中,经过特定算法计算,导航追踪仪可以得知每个靶标在其虚拟三维坐标系下的空间坐标。经过校准的配准探针,可以将其上的特征点(尖点,球状末端等)的相对位置坐标与固接靶标的相对位置坐标相关联。导航追踪仪通过获得若干靶标的虚拟空间坐标,可以获得配准探针的末端的虚拟空间坐标。因此,通过配准探针的末端触碰骨头表面特征点,可以将现实空间中的骨头上的特征点从现实空间搬入导航追踪仪的虚拟空间。
此外,CT影像常被用来作为手术规划的参考,CT影像也可以被搬入虚拟空间,通过相同特征点提取,CT影像中的骨头与虚拟空间中真实骨头的结构可以进行重合,从而将CT影像中骨头的整个结构搬入虚拟空间中,代替真实骨头结构在虚拟空间中的位姿。这一过程的主要目的有:1,在虚拟坐标系中展示骨头整体结构;2,协助医生做手术规划。
然而,基于CT影像的成像原理,软骨无法被呈现在CT影像中。
这是因为,关节部位骨表面结构从外向内,依次分为软骨、骨密质、骨松质,其中,软骨是一层半透明状有弹性的组织,骨密质则是密度高、硬度大的坚硬组织。
在用上述配准探针触碰骨表面时,有以下两种方法。第一种:用带尖头的探针穿过软骨层,标记骨密质表面触碰点的坐标。第二种:用带圆头的探针不穿过软骨层,标记软骨表面的触碰点的坐标。
该第一种方法可以得到骨密质表面的特征点的坐标,从而真实骨头可以与CT影像较好重合,然而其无法得到软骨层的厚度等信息,从而在判断骨结构,如膝关节软骨厚度时,会造成信息丢失,因而无法准确判断假体型号选取。只能依靠经验完成手术规划,导致手术效果欠佳。
该第二种方法可以得到软骨表面的特征点坐标,然而在CT影像中,由于没有软骨信息,找不到相应特征点。因而在真实骨头与CT影像重合的过程中,需要用算法进行表面拟合,此方法会在两者重合时引入误差,从而导致真实骨头在虚拟空间中的坐标有误差,最终影响精准规划,导致手术效果欠佳。
为解决上述技术问题,现在急需一种既能得到骨密质上的特征点,又能测出特征点上的附着软骨厚度的方法,从而在保证真实骨结构与CT影像同时搬入虚拟空间并重合时,两者既能较好重合,又能在手术规划中为操作者提供软骨厚度信息,从而提高手术规划效果。
发明内容
本发明的目的在于,提供一种用于测量软骨厚度的配准探针以及一种用于测量软骨厚度的方法,使得既能获取骨密质上的特征点,又能测出特征点上的附着软骨厚度。
根据本发明的一个方面,提供一种配准探针,其包括:设有靶标的靶标座;连接于所述靶标座的容纳部;固定于所述容纳部的固定探针;和容纳于所述容纳部中的电路模块。其中,还设有能够相对于所述固定探针移动的移动探针,所述电路模块能够对基于所述移动探针与所述固定探针之间的相对移动所产生的电信号进行处理。
优选地,所述移动探针包括移动针杆部与移动头部,并形成有贯通的中空部,所述固定探针包括固定针杆部与固定于所述容纳部内的固定头部,所述固定针杆部与所述移动针杆部从所述容纳部伸出,其中,所述移动探针经由所述中空部以间隙配合的方式套设于所述固定探针的固定针杆部上。
优选地,在所述容纳部中,设有介于所述移动探针与所述固定探针之间以作用于所述相对移动的缓冲器。
优选地,所述缓冲器为弹簧和/或阻尼器。
优选地,在所述移动探针相对所述固定探针移动之前的初始操作状态下,所述缓冲器将所述移动探针的所述移动头部保持压靠于所述固定容器,使得所述移动探针的末端和所述固定探针的末端彼此重合。
优选地,所述容纳部包括前部外壳和后部外壳。
优选地,在所述移动头部上形成有动栅,在所述前部外壳和/或所述后部外壳的与所述移动头部相对应的位置处形成有定栅。
优选地,在所述前部外壳设有显示屏,用于基于所述电路模块的信息处理而实时显示所述固定探针与所述移动探针之间的距离变化;和/或在所述后部外壳设有接口,用于给所述电路模块供电以及从外部达到该电路模块。
根据本发明的另一个方面,提供一种用于测量软骨厚度的系统,包括:上述的配准探针;和导航追踪仪。当所述固定探针的末端在配准位置接触到骨表面的软骨层时,所述移动探针的末端处于与所述固定探针的末端相重合的状态;在所述固定探针的末端穿刺骨表面的软骨层的过程中,所述移动探针沿所述固定探针向操作者的近侧移动,直到所述固定探针的末端触碰骨密质表面,所述移动探针停止相对于所述固定探针的移动,所述导航追踪仪基于所获取的所述固定探针的末端和所述移动探针的末端的虚拟空间坐标,将所述移动探针相对于所述固定探针的移动距离作为该配准位置处的软骨的厚度信息。
根据本发明的又一个方面,提供一种用于测量软骨厚度的方法,其使用上述的系统,包括以下步骤:打开所述系统的开关;将所述固定探针的末端移动至接触配准位置处的骨表面;利用所述固定探针开始穿刺骨表面的软骨层,所述导航追踪仪基于所述电路模块的输出信息实时获取并更新所述移动探针相对于所述固定探针移动的位移量;当所述固定探针的末端接触到骨硬质表面时,利用所述导航追踪仪确定所述固定探针的末端的空间坐标,将该坐标与CT影像中的骨表面坐标进行重合配准,将停止所述固定探针和所述移动探针的相对移动时所述导航追踪仪获得的所述相对移动的位移量作为骨表面软骨的厚度。
根据本发明的配准探针以及用于测量软骨厚度的(导航辅助器械)系统和方法,能够有效地获取有关软骨厚度等形体参数或生理参数等作为中间结果的信息,并进而能够准确地处理该信息(或其他参数)。由此,可以有利地适用于计算机辅助手术系统或手术导航系统等。
另一方面,虽然通过将上述常规的第一种方法和第二种方法相结合的两种操作,也能获得骨密质上的特征点并测出特征点上的附着软骨厚度,但显然,根据本发明的配准探针、系统和方法,通过一种操作即可同时实现两种目的,极大地提高了操作便利性与数据精确性。
附图说明
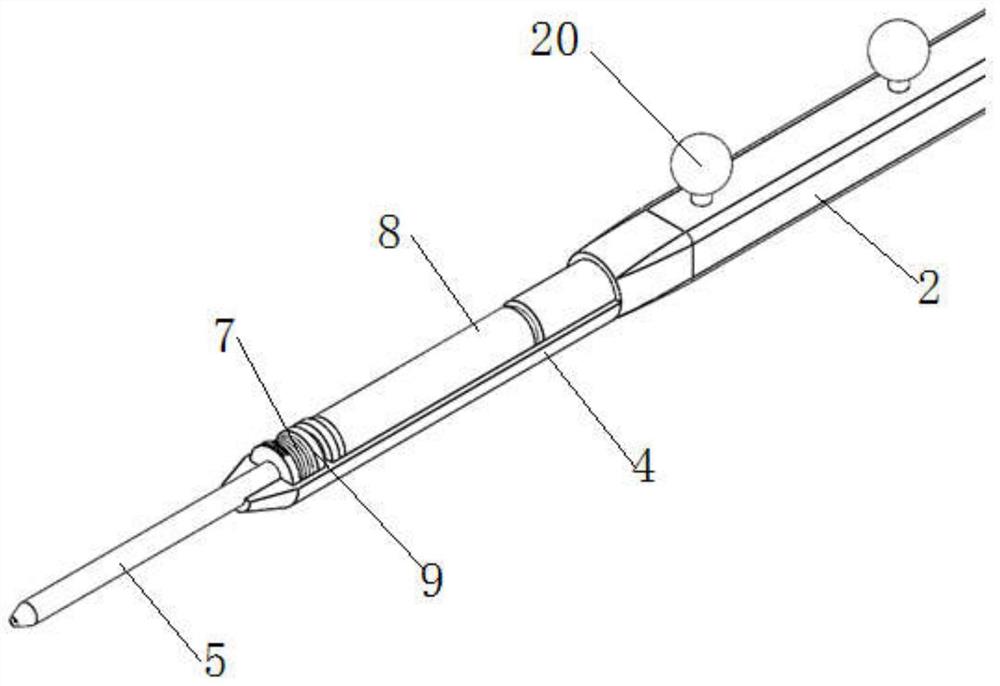
图1是示出根据本发明的配准探针的整体结构的透视图;
图2是示出根据本发明的配准探针的远端侧的局部剖视放大图;
图3是示出根据本发明的配准探针的远端侧的局部剖视放大图;
图4是示出根据本发明的配准探针的近端侧的靶标座的透视图;
图5是示出位于近端侧的靶标的示意图;
图6是示出位于远端侧的前部外壳的外面侧透视图;
图7是示出位于远端侧的前部外壳的里面侧透视图;
图8是示出位于远端侧的后部外壳的外面侧透视图;
图9是示出位于远端侧的后部外壳的里面侧透视图;
图10是示出位于远端侧的固定探针的透视图;
图11是示出位于远端侧的移动探针的透视图;
图12是示出移动探针的纵剖视图;
图13是示出位于固定探针与移动探针之间的弹簧的透视图;
图14是示出电路模块的透视图。
具体实施方式
下面详细描述本发明的示例性实施例。下文描述的和附图示出的示例性实施例旨在教导本发明的原理,使本领域技术人员能够在若干不同环境中和对于若干不同应用实施和使用本发明。因此,本发明的保护范围由所附的权利要求来限定,示例性实施例并不意在、并且不应该被认为是对本发明保护的范围的限制性描述。
<整体结构>
为便于说明,在本文中,关于配准探针的大致纵向延伸方向,将靠近操作者一侧称为“近”侧,配准操作侧称为“远”侧。并且,关于与纵向相交叉的横向,将操作者可直接视觉观察的一侧称为“前部”侧,相反一侧称为“后部”侧。
如图1~4所示,根据本发明的配准探针1(以下亦称为“本器械”)整体上包括:设有靶标20的靶标座2;连接于靶标座2的远端侧并且构成容纳部10的前部外壳3和后部外壳4;近端侧容纳于容纳部10中而远端侧从该容纳部10伸出的探针组件;和容纳于容纳部10中的电路模块8。
上述探针组件包括移动探针5、固定探针9和夹置于二者之间的缓冲器(根据情况可以包括阻尼或弹簧,或两者都有)。当移动探针5相对于固定探针9移动时,该移动受到缓冲器的反作用力制约。在此,示出了弹簧7的例子。
如图1~4所示,位于近端侧的靶标座2,除了用于连接靶标20并供操作者所把持以外,还同时用于在远端侧固定前部外壳3和后部外壳4,。
如图1~3、5所示出的靶标20可选用反光球、反光盘、十字靶标等形式。通过将若干个靶标20固定安装在靶标座2上,靶标20与固定探针9的末端91(图10)的相对位置已知,由此,通过导航追踪仪测量靶标20所处的位置与姿势,可以得到固定探针9的末端91的相对位置。
前部外壳3与后部外壳4配合构成的容纳部10,用于容纳保护内部电路模块8,约束固定探针9、弹簧7、移动探针5等。
优选地,后部外壳4上具有一个接口44(图8、9),用于给电路模块8供电、充电、维护更新程序等操作。
固定探针9的卡槽90与前部外壳3和后部外壳4上的近端卡槽30、40(图7、9)配合,固定探针9还与移动探针5的空腔即中空部55配合;固定探针9与前部外壳3、后部外壳4、靶标座2、靶标20之间刚性连接,无变形,通过标定可知固定探针9的末端91(图11)与靶标20之间的位置关系;当用于骨表面测量时,固定探针9的末端91刺穿软骨,到达骨硬质表面,导航追踪仪可以得知骨硬质表面的空间坐标。
移动探针5的头部54被前部外壳3、后部外壳4和固定探针9约束在固定空间35内(图12、7),只能做轴向平移运动或滑动;固定探针9从移动探针5受到弹簧施加的外力。平时移动探针5的末端51与固定探针9的末端91处于对齐状态。当测量骨表面时,固定探针9刺穿软骨,移动探针5从远侧向近侧回退并挤压弹簧7,但其不刺穿软骨,此时移动探针5表面上的动栅52与前部外壳3和后部外壳4上的定栅32、42之间相互移动(定栅和动栅可以是磁栅,光栅,容栅或者滑动电阻等产生位移信号的装置),产生信号。
弹簧7负责对移动探针5施加推力,未进行骨表面测量时,弹簧7可确保移动探针5的末端与固定探针9的末端处于对齐状态。
电路模块8包括电池、芯片、型号发送装置等(未示出),对移动探针5和固定探针9相互移动时产生的电信号进行处理,根据情况将信号通过有线或无线的方式传送给系统;同时可将数据显示在显示屏6上;电路模块8还具备充电功能,当采用无线输送模式时,电路模块8经过充电可以自行供电。
<具体结构>
上述各构件之间配合连接,从而可组装成根据本发明的配准探针1。下面对各构件的结构与功能作更具体的说明。
如图4所示,靶标座2包括体部21、从其近端侧分支形成的至少第一方位体部22和第二方位体部23、从其远端侧延伸形成的连接部25、以及分散形成于前部的靶标安装部24。如图1~3所示,各个靶标20可安装在靶标座2上。
如图6所示,前部外壳3形成为盖部,优选大致呈半圆筒状,远端侧锥形收敛于半孔部33。
优选地,在前部外壳3的外面侧(即,前部),还可设有一块显示屏6,用于实时显示固定探针9与移动探针5之间的距离变化,各距离变化的最大值分别对应各配准位置处的软骨的厚度。
如图7所示,在前部外壳3的里面侧,在大致半筒形部31的远端侧,依次形成有例如缺口板状形式的近端卡槽30、定栅32和半孔部33。由半孔部33的近端侧底面36、近端卡槽30的远侧端面与半筒形部31的周壁面之间,限定固定空间35的优选大致一半。
如图8所示,后部外壳4优选与前部外壳3大致对称地形成为半圆筒状,前端侧锥形43收敛于半孔部41。
如图9所示,在后部外壳4的里面侧,与前部外壳3相对应地,在大致半筒形部45的远端侧,依次形成有例如缺口板状形式的近端卡槽40、定栅42和半孔部41。与固定空间35相对应地,由半孔部41的近端侧底面47、近端卡槽40的远侧端面与半筒形部45的周壁面之间,限定成固定空间35的优选大致另一半。
如图10所示,固定探针9包括轴杆部95、近端侧的头部94与远端侧的针部91。头部94的周侧面开设有槽隙部90,可用于设置密封,隔着槽隙部90在两端侧分别形成有远侧端部92和近侧端部93。
如图11所示,移动探针5形成为中空的大致T字形状,包括筒体部53、在周侧面设有动栅52的近端侧的头部54、以锥形收敛于末端51的远端部56。
如图12的纵截面图所示,移动探针5形成有贯通的中空部55,从而能以间隙配合的方式套设于固定探针9的轴杆部95上并可相对移动或滑动。
图13示出了压缩弹簧形式的弹簧7,图14示出了大致筒状的电路模块8。
<配合关系>
如上所述,通过将靶标20固定安装在靶标座2上,后部外壳4安装于连接部25,电路模块8、探针组件的近端侧内置于后部外壳4的半筒形部45中,其中,探针组件是通过将弹簧7、移动探针5依次套设于移动探针5的轴杆部95上而形成。固定探针9的卡槽90压配于近端卡槽40,然后,在将近端卡槽30压配于卡槽90的同时将前部外壳3罩盖在后部外壳4上,即可得到配准探针1。
当未测量骨表面时,弹簧7的初始状态确保移动探针5的末端91和固定探针末端51重合,即,彼此轴向位置相对齐。这可通过图13所示的弹簧7的尺寸、形状及材料等参数、以及固定空间35的尺寸的适当设置来实现。优选地,弹簧7在以其近端侧抵靠固定探针9的远侧端部92的同时,以其远端侧将移动探针5的头部54压靠在近端侧底面36和近端侧底面47上,此时刚好使得移动探针5的末端91和固定探针末端51重合。
<工作原理>
首先,操作者打开本器械的开关(未示出,可以是感应的,或者通过接口输入打开信号)。
随后使用本器械对骨表面进行配准操作,当固定探针9的尖端即末端91接触到骨表面时,移动探针5的末端51此时依然保持与固定探针9的末端91处于对齐重合状态。
即,在直到固定探针9开始穿刺骨表面的软骨层之前的行程中,夹设于移动头部54与固定头部94之间的弹簧7设计成足以克服移动头部54的末端51受到的外力而不变形。
当固定探针9开始穿刺骨表面的软骨层时,由于软骨层的较大阻力,尤其是作用于移动探针5的远端部56的阻力明显增大,这使得移动探针5开始克服弹簧7的作用力而相对于固定探针9向近端侧移动,并同时受到弹簧7向远端侧施加的反作用力。在此过程中,移动探针5相对于固定探针9的相动移动(或滑动),使得动栅52相对定栅32、42产生位移,两者产生的电信号被电路模块8获取,电路模块8又将信号转换为位移量,随后根据情况选择是否将位移量显示在显示屏6上,同时根据情况可以将位移量通过有线/无线的方式发送给外部系统。
在推动固定探针9继续前进、穿刺骨表面软骨层的过程中,位移量被实时获取并更新。
当固定探针9的末端91接触到骨硬质表面时,导航追踪仪确定固定探针9的末端91的空间坐标,此坐标可以与CT影像中的骨表面坐标进行精准重合配准。同时,移动探针5停止相对移动,此时获得的移动探针5的位移量即是骨表面软骨的厚度。
由此,通过得到由固定探针9获得的骨硬质表面坐标和骨硬质表面软骨厚度信息,可以帮助导航系统精准的完成CT影像重合和基于骨结构的手术规划,从而极大地提高手术效果。
本发明不仅适用于在一个配准位置的测定,显然也能够应对骨硬质表面软骨的各个配准位置的物理空间数据的测定。而且,基于移动探针5开始移动、停止移动期间的位移量,来获得软骨的厚度尺寸参数及分布情况以外,还可以通过比较不同配准位置之间的移动速度、推动力大小等,来获得不同位置处的其它软骨生理参数及分布情况。基于上述分布情况,可以绘制相应的图像数据。
<作用效果>
如上所述,本器械可以在进行骨表面配准标定时,既获得骨硬质表面坐标,也能获得其表面软骨厚度信息,既保证了CT影像重合、配准的精确度,又提高了骨结构相关的规划精度,极大的提高了手术效果。
本器械可以在骨表面标定时,利用动栅与定栅相互位移时产生的信号来确定移动探针的位置变化,从而确定骨表面软骨的厚度。
本器械可以在骨表面标定时,实时显示软骨厚度。
本器械可以在骨表面标定时,通过无线或者有线的方式将软骨厚度告知配准系统。
<变形例>
以上关于移动探针5和固定探针9的相对移动方式,以带中空部的套管方式进行了说明,然而也可以采用带凹空部的嵌合式开口滑槽等配合方式等。
以上关于移动探针5的远端部56以锥形为例进行了说明,然而也可以将移动探针5的筒体部53整体上形成至少远端侧为锥形。
以上示出的靶标座2与前部外壳3和后部外壳4以及移动探针5在纵向直线上延伸,然而,也可以根据需要采取空间曲线式的构型,此时,仍然适用为便于理解而限定的上述的远、近、前部、后部等。
作为缓冲器,以上示出了压缩弹簧形式的弹簧7,然而也可以采用其它能够实现相同功能的结构体。例如代替地采用金属膜片等形式的阻尼器,或相结合地采用弹簧阻尼器,来缓冲外部压力脉动。
上述的“移动探针5停止移动”,是一种相对概念的表述,也可以理解为,在固定探针的末端在配准位置接触到骨表面的软骨层时,移动探针的末端和固定探针的末端处于彼此重合的初始操作状态下,经过固定探针的末端穿刺骨表面的软骨层的过程直到固定探针的末端触碰骨密质表面为止,移动探针的末端都一直处于初始操作状态时的重合位置,即仍然抵接于骨表面的软骨层,而固定探针包括其末端则相对地向远侧移动,直到固定探针的末端触碰骨密质表面。这可以通过对阻尼器和/或弹簧的适当选型、以及操作动作参数来实现。
此外,移动探针与固定探针之间的相对移动的停止,并不仅限于上述的方式,也可以考虑采用其它方式来自动或手动地实现。
此外,上述示出了容纳部与靶标座分体形成的例子,但并不仅限于此,也可以考虑尤其是后部外壳与靶标座一体地形成的方式。
上述固定探针与移动探针皆采用了T字型,但并不限于此,而且只要是与弹簧相互作用的部位即可视为相应于上述固定或移动头部而无论其具体所处位置。
以上示出了利用动栅与定栅以及电路模块来获得相对位移量的例子,但并不限于此,而且定栅形成在前部外壳和/或后部外壳的与移动头部的行程相对应的位置处即可。
尽管已经参考各种具体实施例描述了本发明,但是应当理解,可以在所描述的发明构思的精神和范围内做出变形。因此,意图是本发明不限于所描述的实施例,而是将具有由所附权利要求的语言所定义的全部范围。
- 配准探针、用于测量软骨厚度的系统与方法
- 一种适用于窄矩形通道内环状流液膜厚度测量的行列式电导探针系统及液膜厚度测量方法