带电子制动助力器的制动装置
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及汽车制动领域,特别涉及带电子制动助力器的制动装置。
背景技术
车辆制动器的电子智能控制正在朝着支持可持续增长的功能需求、对性价比高的解决方案的需求,以及对有人和无人驾驶安全的冗余需求的方向不断发展。
当前的发展趋势仍然是在制动系统中使用液压作为传递物质,提供整体的四轮电动-液压解决方案来控制整个制动系统。然而,在这种集成式结构中,很难设计出一种与液压系统结合的替代解决方案,例如电子机械制动执行器与液压系统结合。
现有技术中,CN108162940中描述的解决方案是要求集成在电子液压助力器中的主缸设置两个腔室,造成了不必要的附加成本,因为由电子机械执行器提供的冗余已经足够了。此外,ECU需要额外控制电子机械制动器,这限制了非液压部件使用不同的动作方式。
DE10319194中描述的方法在液压部件上没有明显的成本节省,这是因为整套的电子液压设备沿用了传统系统,而在电子机械部件上的成本增加明显。
发明内容
鉴于背景技术中存在的技术问题,本发明所解决的技术问题旨在提供一种带电子制动助力器的制动装置。
为解决上述技术问题,本发明采用如下的技术方案:带电子制动助力器的制动装置,其特征在于,包括踩踏单元、助力单元和车轮单元,所述助力单元包括主缸、为主缸提供制动液的储液罐、设于主缸内与传动机构传动连接的主缸活塞、驱动传动机构的助力电机以及ECU,所述车轮单元包括具有两个车轮的第一组车轮和具有两个车轮的第二组车轮,第一组车轮的制动器由第一ECU控制,所述第一ECU为助力单元中的ECU,第二组车轮的制动器由第二ECU控制,所述第二ECU为助力单元中的ECU或电子机械制动器中的ECU。
所述助力单元还包括常开电磁阀和常闭电磁阀,所述主缸出油口通过油管与第一组车轮的制动器连接,所述常开电磁阀设于第一组车轮的制动器与主缸出油口之间,所述第一组车轮的制动器通过常闭电磁阀与储液罐连接,所述常开电磁阀和常闭电磁阀均由助力单元中的ECU控制。
所述踩踏单元包括踩踏板、与踩踏板传动连接的输入杆、与输入杆连接的踏板模拟器以及用于检测驾驶员制动意图的踏板位置传感器,所述踏板位置传感器与助力单元中的ECU连接,所述输入杆与传动机构之间通过可解耦的方式连接。
所述助力单元设有两组,分别为第一助力单元和第二助力单元,所述第一ECU为第一助力单元中的ECU,所述第二ECU为第二助力单元中的ECU,所述第一助力单元和第二助力单元与输入杆之间均为可解耦的方式连接。
所述第一组车轮为第一前轮和第一后轮,所述第二组车轮为第二前轮和第二后轮,第一后轮设有第一驻车制动执行器,第二后轮设有第二驻车制动执行器,第一驻车制动执行器与第二助力单元连接,由第二ECU控制,第二驻车制动执行器与第一助力单元连接,由第一ECU控制。
所述助力单元设有一组,用于控制第一组车轮中的两个车轮,所述第二ECU为电子机械制动器中的ECU,所述电子机械制动器设有两组分别控制第二组车轮中的两个车轮,两组电子机械制动器中的ECU互相连接且通过通信总线与助力单元中的ECU连接,所述踏板位置传感器分别与两组电子机械制动器的ECU连接。
所述第一组车轮分别为第一后轮和第二后轮,所述第二组车轮分别为第一前轮和第二前轮。
所述第一后轮和第二后轮上均设有一驻车制动执行器,所述驻车制动执行器与助力单元连接,由助力单元中的ECU控制。
所述第一组车轮分别为第一前轮和第二前轮,所述第二组车轮分别为第一后轮和第二后轮,两组电子机械制动器具有驻车功能。
本发明的有益效果是:两组车轮通过至少两个ECU进行控制,当其中一个ECU失效,对应的车轮无法实现制动时,可由另外的ECU接管,控制另外车轮实现制动,保证车辆安全;助力单元具有单腔主缸和最低数量所需电磁阀的解耦式制动助力器结构,以控制车辆两个车轮的压力,降低了主缸的复杂性,降低了传动机构和助力电机的功率需求;而且助力单元能够通过不同的方式进行扩展,为整个制动系统的自由组合提供了可能性。
附图说明
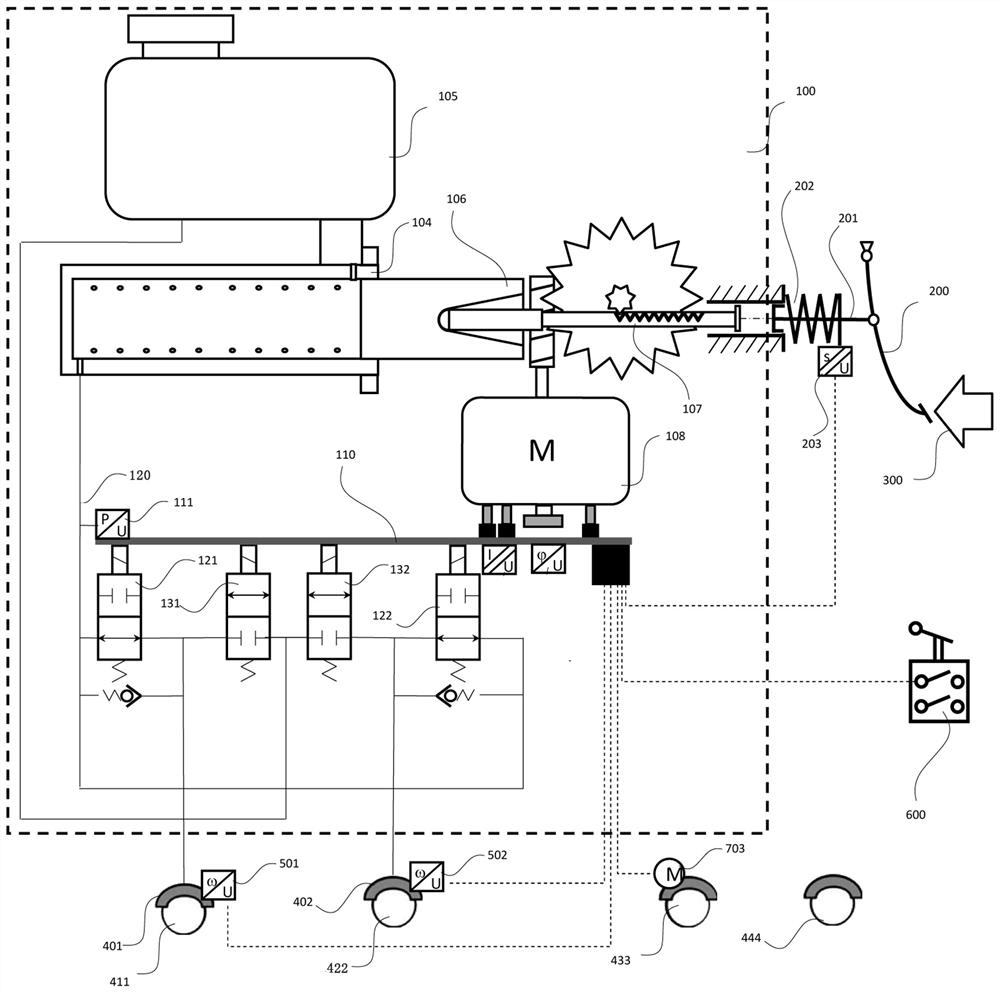
图1为本发明结构示意图;
图2为实施例一结构示意图;
图3为实施例二结构示意图;
图4为实施例三结构示意图。
具体实施方式
如图1所示,带电子制动助力器的制动装置,包括踩踏单元、助力单元100和车轮单元,所述助力单元100包括主缸104以及为主缸提供制动液的储液罐105、设于主缸104内与传动机构107传动连接的主缸活塞106、驱动传动机构107的助力电机108以及ECU 110,所述助力电机108由ECU 110控制,所述车轮单元包括具有两个车轮的第一组车轮和具有两个车轮的第二组车轮,第一组车轮包括第一车轮411和第二车轮422,第二组车轮包括第三车轮433和第四车轮444,第一组车轮的制动器为第一制动器401和第二制动器402,第一制动器401安装在第一车轮411上,第二制动器402安装在第二车轮422上,第二组车轮的制动器为第三制动器403和第四制动器404,第三制动器403安装在第三车轮433上,第四制动器404安装在第四车轮444上。
第一制动器401和第二制动器402均由第一ECU控制,所述第一ECU为助力单元中的ECU 110,第二组车轮的制动器由第二ECU控制,即第三制动器403和第四制动器404由第二ECU控制,所述第二ECU为助力单元中的ECU或电子机械制动器中的ECU。
所述助力单元还包括常开电磁阀和常闭电磁阀,所述主缸104出油口通过油管120分别与第一制动器401和第二制动器402连接,第一常开电磁阀121设于第一制动器401与主缸104出油口之间,第二常开电磁阀122设于第二制动器402与主缸104出油口之间,所述第一制动器401通过第一常闭电磁阀131与储液罐105连接,所述第二制动器402通过第二常闭电磁阀132与储液罐105连接,第一常开电磁阀121、第二常开电磁阀122、第一常闭电磁阀131和第二常闭电磁阀132均由助力单元中的ECU 110控制。
建压时,传动机构107驱动主缸活塞106在主缸104内移动产生压力,使得主缸104内的制动液经过第一常开电磁阀121和第二常开电磁阀122分别进入第一制动器401和第二制动器402,从而进行制动第一车轮411和第二车轮422。
所述第一车轮411上设有第一轮速传感器501,第二车轮422上设有第二轮速传感器502,第一轮速传感器501和第二轮速传感器502均与助力单元中的ECU 110连接,当轮速传感器检测到其中一车轮打滑时,ECU控制其对应的常闭电磁阀打开进行减压,释放车轮制动液。
所述踩踏单元包括踩踏板200、与踩踏板传动连接的输入杆201、与输入杆连接的踏板模拟器202以及用于检测驾驶员制动意图300的踏板位置传感器203,所述踏板位置传感器203与助力单元中的ECU 110连接,所述输入杆201与传动机构107之间通过可解耦的方式连接,所述踏板模拟器202是用于提供踏板感给驾驶员,当踏板位置传感器检测到驾驶员踩下踩踏板具有制动意图时,助力单元中的ECU接收踏板位置传感器的信号,命令助力电机带动传动机构运动。
至少有一个后轮上设有驻车制动执行器703,所述驻车制动执行器703由驻车制动开关600开启或释放,所述驻车制动开关与助力单元中的ECU连接,也就是说ECU同时还可以控制驻车制动执行器进行驻车,节省设置独立式电子驻车制动器ECU的成本。
所述油管120设有油压传感器111,所述油压传感器111与助力单元中的ECU 110连接,油压传感器的设置是为了更好地控制增压。
实施例一:所述助力单元100设有两组,分别为第一助力单元100a和第二助力单元100b,所述输入杆201通过可解耦的方式分别与第一助力单元100a和第二助力单元100b连接,所述第一ECU为第一助力单元100a中的ECU,所述第二ECU为第二助力单元100b中的ECU,所述第一车轮411为第一前轮,第二车轮422为第一后轮,所述第三车轮433为第二后轮,第四车轮444为第二前轮,第一制动器401和第二制动器402与第一助力单元100a连接,第三制动器403和第四制动器404与第二助力单元100b连接。
所述驻车制动执行器703设置在第一后轮和第二后轮上,即第一驻车制动执行器703a设置在第一后轮,第二驻车制动执行器703b设置在第二后轮,第一驻车制动执行器703a与第二助力单元100b连接,由第二ECU控制,第二驻车制动执行器703b与第一助力单元100a连接,由第一ECU控制,这样交叉控制是为了当其中一助力单元出现故障无法制动该组的前轮和后轮时,能够由另一助力单元控制设置在该组后轮上的驻车制动执行器进行驻车,防止事故发生。
第一助力单元制动第一组车轮,第二助力单元制动第二组车轮,由两个ECU分别控制两组车轮,当其中一个ECU失效,可由另一个ECU接管,以提供所需的制动冗余,从而可以进一步实现成本优势。
实施例二:所述助力单元100设有一组,用于控制第一组车轮中的两个车轮,即第一车轮411和第二车轮422,第一制动器401和第二制动器402与助力单元100连接,第一制动器401制动第一车轮411,第二制动器402制动第二车轮422。
所述第二ECU设有两个,所述第二ECU为电子机械制动器中的ECU,也就是说两个第二ECU分别为第一电子机械制动器ECU 803和第二电子机械制动器ECU 804,第三制动器403即为第一电子机械制动器,第四制动器404即为第二电子机械制动器,第一电子机械制动器和第二电子机械制动器分别控制第二组车轮中的两个车轮,即第三车轮433和第四车轮444,所述第一电子机械制动器ECU 803和第二电子机械制动器ECU 804互相连接且通过通信总线900与助力单元100中的ECU 110连接,所述踏板位置传感器203分别与第一电子机械制动器ECU 803和第二电子机械制动器ECU 804连接。
所述第一车轮411为第一后轮,第二车轮422为第二后轮,第三车轮433为第一前轮,第四车轮444为第二前轮。
所述第一后轮和第二后轮上均设有一驻车制动执行器703,即第一驻车制动执行器703a设置在第一后轮,第二驻车制动执行器703b设置在第二后轮,第一驻车制动执行器703a和第二驻车制动执行器703b均与助力单元100连接,由助力单元100中的ECU 110控制。
实施例三:所述助力单元100设有一组,用于控制第一组车轮中的两个车轮,即第一车轮411和第二车轮422,第一制动器401和第二制动器402与助力单元100连接,第一制动器401制动第一车轮411,第二制动器402制动第二车轮422。
所述第二ECU设有两个,所述第二ECU为电子机械制动器中的ECU,也就是说两个第二ECU分别为第一电子机械制动器ECU 803和第二电子机械制动器ECU 804,第三制动器403即为第一电子机械制动器,第四制动器404即为第二电子机械制动器,第一电子机械制动器和第二电子机械制动器分别控制第二组车轮中的两个车轮,即第三车轮433和第四车轮444,所述第一电子机械制动器ECU 803和第二电子机械制动器ECU 804互相连接且通过通信总线900与助力单元100中的ECU 110连接,所述踏板位置传感器203分别与第一电子机械制动器ECU 803和第二电子机械制动器ECU 804连接。
所述第一车轮411为第一前轮,第二车轮422为第二前轮,第三车轮433为第一后轮,第四车轮444为第二后轮。
由于所述第一电子机械制动器和第二电子机械制动器具有驻车功能,因此无需在第一后轮和第二后轮上额外设置驻车制动执行器。
如果其中有两个车轮由电子机械制动器控制进行制动,助力单元不需要做任何改动,两者就能够进行简单的结合。
- 电子制动助力器壳体结构和电子制动助力器总成以及车辆
- 用于制动系统的能调节的制动助力器的控制装置和用于运行制动助力器的方法