信息处理装置、信息处理程序及信息处理方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及识别废弃物的种类的信息处理装置、信息处理程序及信息处理方法。
背景技术
以往,在废弃物处理厂中,生活垃圾、粗大破碎垃圾、修剪枝、污泥等组成不同的各种各样的废弃物被投入垃圾坑内。这些各种各样的废弃物在存放到垃圾坑内之后被一起投入焚烧炉,并在焚烧炉内被进行处理。投入焚烧炉的废弃物的组成取决于该废弃物中所包含的各种废弃物的比例,这会影响燃烧。为了使燃烧稳定化,在垃圾坑内利用起重机进行废弃物的搅拌,从而谋求废弃物的组成的均匀化。
然而,若投入焚烧炉内的废弃物中包含一定量以上的例如粗大破碎垃圾、污泥等废弃物,则有可能焚烧炉内部的温度会骤变并产生二噁英等有害的气体或物质,从而对周边环境造成不良影响。另外,除了对燃烧状态造成影响的废弃物之外,还有成为与废弃物处理厂有关的各设备发生故障的主要原因的废弃物。例如,若投入焚烧炉内的废弃物中包含很多修剪枝等,则会在向焚烧炉内供给废弃物的料斗中引起堵塞。
另一方面,一般垃圾等废弃物基本上都以装在袋中的状态被投入垃圾坑内并由起重机进行搅拌,但在破袋度低的情况下、即垃圾袋的破损程度小且垃圾袋中残留有很多废弃物的情况下,根据经验已知会对燃烧状态造成影响等,垃圾袋的状态也影响燃烧的稳定性。
因此,例如在日本特开2007-126246号公报中公开了一种基于垃圾处理厂用自动起重机的控制装置进行的自动起重机的运转方法,其根据色调识别投入垃圾坑内的一般垃圾和异质垃圾,并基于识别结果控制起重机,由此谋求废弃物的组成的均匀化。
另外,在日本特开2015-124955号公报中公开了一种垃圾搅拌状态检测装置及垃圾搅拌状态检测方法,其中,基于拍摄到的图像的亮度值来检测垃圾的搅拌状态、即垃圾袋的破损程度。
发明内容
然而,在日本特开2007-126246号公报的基于垃圾处理厂用自动起重机的控制装置进行的自动起重机的运转方法中,根据色调区分一般垃圾和异质垃圾,但难以单纯仅以色调识别废弃物的种类,例如即使掺杂了一些粗大破碎垃圾也有可能整体判断为一般垃圾。因此,存在向焚烧炉内投入一定量以上的对燃烧状态造成影响的异质的废弃物或成为各设备发生故障的主要原因的废弃物的危险性。
另外,在日本特开2015-124955号公报的垃圾搅拌状态检测装置及垃圾搅拌状态检测方法中,根据亮度值检测垃圾袋的破损程度,但在该方法中只能检测垃圾袋。在实际的垃圾坑内,除了垃圾袋以外有时还会投入修剪枝、被褥等各种各样的废弃物,因此,难以将上述方法应用于这样的实际的垃圾坑。
期望提供一种能够对垃圾坑内的废弃物的种类进行识别的信息处理装置、信息处理程序及信息处理方法。
本发明的一个方式的信息处理装置具备种类识别部,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
本发明的一个方式的信息处理程序使计算机作为种类识别部发挥功能,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
本发明的一个方式的信息处理方法由计算机执行,该信息处理方法包括以下步骤:
使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
本发明的一个方式的信息处理装置具备种类识别部,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
本发明的一个方式的信息处理程序使计算机作为种类识别部发挥功能,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
本发明的一个方式的信息处理方法由计算机执行,该信息处理方法包括以下步骤:
使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
附图说明
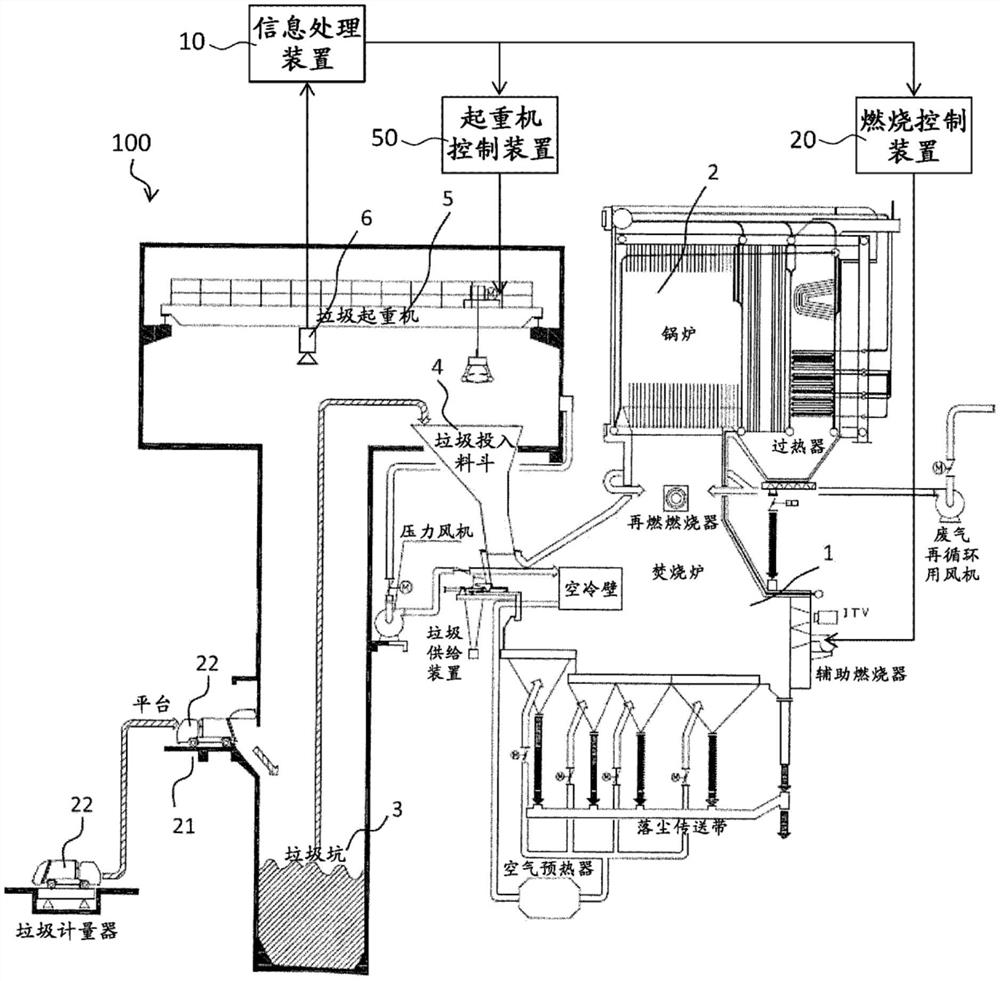
图1是表示一个实施方式的废弃物处理厂的结构的概要图。
图2是表示一个实施方式的信息处理装置的结构的框图。
图3是表示一个实施方式的基于信息处理装置的信息处理方法的一例的流程图。
图4是表示通过对垃圾坑内的影像进行拍摄所得到的图像数据的一例的图。
图5是表示在通过对垃圾坑内的影像进行拍摄所得到的图像数据上标记有废弃物及废弃物以外的识别对象的种类的训练数据的一例的图。
图6是表示在通过对垃圾坑内的影像进行拍摄所得到的图像数据上重叠显示有基于种类识别部得到的识别结果的数据的一例的图。
图7是在每个区域内显示垃圾坑内的废弃物的种类的比率的图表。
具体实施方式
实施方式的第1方式的信息处理装置具备种类识别部,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第1方式的信息处理装置也可以还具备识别算法生成部,
该识别算法生成部通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的垃圾坑内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
根据这种方式,将通过对垃圾坑内的影像进行拍摄所得到的图像数据作为输入,并利用通过机器学习而生成的学习完毕的识别算法来识别存放于垃圾坑内的废弃物的种类,由此,能够识别若投入一定量以上则会对燃烧状态造成影响的废弃物或成为各设备故障的主要原因的废弃物。由此,能够防止误投入一定量以上的那种特殊废弃物,能够在不对燃烧状态及各设备造成影响的情况下进行稳定的处理。
在实施方式的第2方式的信息处理装置中,在第1方式的信息处理装置的基础上,
上述识别算法包括使用了线性回归、玻尔兹曼机、神经网络、支持向量机、贝叶斯网络、稀疏回归、决策树、随机森林的统计学推定、强化学习、和深度学习中的一个或两个以上。
在实施方式的第3方式的信息处理装置中,在第1或2方式的信息处理装置的基础上,
上述图像数据包括通过RGB相机拍摄到的废弃物的形状及色彩图像数据、通过近红外线相机拍摄到的废弃物的近红外线图像数据、和通过3D相机或RGB-D相机拍摄到的废弃物的三维图像数据中的一个或两个以上。
在实施方式的第4方式的信息处理装置中,在第1~3中任一方式的信息处理装置的基础上,
上述废弃物的种类包括垃圾袋未破袋垃圾、废纸、修剪枝、被褥、污泥、粗大破碎垃圾、瓦楞纸、麻袋、纸袋、和底部垃圾中的一个或两个以上。
在实施方式的第5方式的信息处理装置中,在第1~4中任一方式的信息处理装置的基础上,
还具备处理厂控制部,该处理厂控制部基于上述种类识别部的识别结果进行废弃物处理厂的控制。
在实施方式的第6方式的信息处理装置中,在第5方式的信息处理装置的基础上,
上述处理厂控制部包括起重机控制部和燃烧控制部中的一方或两方,该起重机控制部向对进行上述废弃物的搅拌或搬送的起重机进行控制的起重机控制装置发送上述种类识别部的识别结果,该燃烧控制部向对上述废弃物的燃烧进行控制的燃烧控制装置发送上述种类识别部的识别结果。
在实施方式的第7方式的信息处理装置中,在第1~6中任一方式的信息处理装置的基础上,
上述识别算法对如下训练数据学习完毕,该训练数据在通过对上述垃圾坑内的影像进行拍摄所得到的图像数据上标记有上述废弃物的种类、且按种类标记有上述废弃物以外的识别对象,
上述种类识别部将上述垃圾坑内的新图像数据作为输入,并利用上述识别算法识别存放于上述垃圾坑内的废弃物的种类和废弃物以外的识别对象的种类。
本案发明人实际验证后,确认了通过这种方式能够显著提高废弃物的识别精度。根据本案发明人的研究,考虑这是由于种类识别部能够抑制迷惑于对废弃物以外的识别对象的判断而将其识别为某种废弃物,例如迷惑于对垃圾坑的侧壁的判断而将其识别为污泥等。
在实施方式的第8方式的信息处理装置中,在第7方式的信息处理装置的基础上,
上述废弃物以外的识别对象的种类包括废弃物处理厂的房梁、垃圾坑的侧壁、存放于垃圾坑内的废弃物堆的陡立面、和进行上述废弃物的搅拌或搬送的起重机中的一个或两个以上。
在实施方式的第9方式的信息处理装置中,在第7方式的信息处理装置的基础上,
上述废弃物以外的识别对象的种类包括废弃物处理厂的房梁、垃圾坑的侧壁、存放于垃圾坑内的废弃物堆的陡立面、进行上述废弃物的搅拌或搬送的起重机、废弃物处理厂的墙壁、柱子、地板、窗户、天花板、门、台阶、桁架、走廊、垃圾坑的分隔壁、垃圾投入料斗、搬入门、作业人员、和搬入车辆中的一个或两个以上。
在实施方式的第10方式的信息处理装置中,在第1~9中任一方式的信息处理装置的基础上,
还具备异物投入检测部,该异物投入检测部基于上述种类识别部的识别结果对投入到上述垃圾坑内的异常物进行检测。
在实施方式的第11方式的信息处理装置中,在第10方式的信息处理装置的基础上,
上述异物投入检测部向异物检测装置发送上述种类识别部的识别结果,该异物检测装置对投入到存放上述废弃物的垃圾坑内的异常物进行检测。
在实施方式的第12方式的信息处理装置中,在第1~11中任一方式的信息处理装置的基础上,
还具备滚落检测部,该滚落检测部基于上述种类识别部的识别结果对作业人员或搬送车辆向上述垃圾坑内的滚落进行检测。
在实施方式的第13方式的信息处理装置中,在第12方式的信息处理装置的基础上,
上述滚落检测部向滚落检测装置发送上述种类识别部的识别结果,该滚落检测装置对存放上述废弃物的垃圾坑内存在作业人员或搬入车辆的情况进行检测。
在实施方式的第14方式的信息处理装置中,在第1~13中任一方式的信息处理装置的基础上,
上述废弃物的种类包括垃圾袋未破袋垃圾、废纸、修剪枝、被褥、污泥、粗大破碎垃圾、瓦楞纸、麻袋、纸袋、底部垃圾、木屑、纤维垃圾、衣物垃圾、塑料垃圾、动物性残渣、动物尸体、厨余垃圾、草木、土壤、医疗垃圾、焚烧灰、自行车、橱柜、床、架子、桌子、椅子、农业乙烯类、PET瓶、发泡聚苯乙烯、肉骨粉、农作物、陶器、玻璃碎片、金属碎片、瓦砾类、混凝土碎块、榻榻米、竹子、稻草、和活性炭中的一个或两个以上。
实施方式的第15方式的信息处理程序使计算机作为种类识别部发挥功能,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第15方式的信息处理程序也可以使上述计算机还作为识别算法生成部发挥功能,
该识别算法生成部通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的垃圾坑内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第16方式的信息处理方法由计算机执行,该信息处理方法包括以下步骤:
使用对如下训练数据学习完毕的识别算法,将存放废弃物的垃圾坑内的新图像数据作为输入并对存放于上述垃圾坑内的废弃物的种类进行识别,上述训练数据是在通过对上述垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第16方式的信息处理方法也可以还包括以下步骤:
通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的垃圾坑内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第17方式的信息处理装置具备种类识别部,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第17方式的信息处理装置也可以还具备识别算法生成部,
该识别算法生成部通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的废弃物存放场所内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第18方式的信息处理程序使计算机作为种类识别部发挥功能,
该种类识别部使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第18方式的信息处理程序也可以还使上述计算机作为识别算法生成部发挥功能,
该识别算法生成部通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的废弃物存放场所内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第19方式的信息处理方法由计算机执行,该信息处理方法包括以下步骤:
使用对如下训练数据学习完毕的识别算法,将存放废弃物的废弃物存放场所内的新图像数据作为输入并对存放于上述废弃物存放场所内的废弃物的种类进行识别,上述训练数据是在通过对上述废弃物存放场所内的影像进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
实施方式的第19方式的信息处理方法也可以还包括以下步骤:
通过学习如下训练数据来生成上述识别算法,该训练数据是在对存放废弃物的废弃物存放场所内进行拍摄所得到的过去的图像数据上标记有上述废弃物的种类的训练数据。
以下,参照附图来详细说明实施方式的具体例。需要说明的是,在以下说明及以下说明所使用的附图中,对于能够相同地构成的部分使用相同的附图标记,并省略重复说明。
图1是表示一个实施方式的废弃物处理厂100的结构的概要图。
如图1所示,废弃物处理厂100具备:供装载废弃物的搬送车辆(垃圾收集车)22停车的平台21;存放从平台21投入的废弃物的垃圾坑3;对存放于垃圾坑3内的废弃物进行搅拌及搬送的起重机5;投入由起重机5搬送的废弃物的料斗4;焚烧从料斗4投入的废弃物的焚烧炉1;和从在焚烧炉1内产生的废气中回收余热的余热锅炉2。焚烧炉1的种类并不限于图1所示的炉排炉,还包括流化炉(也称为流化床炉)。另外,垃圾坑3的构造并不限于图1所示的一级坑,还包括二级坑。另外,在废弃物处理厂100设有对起重机5的动作进行控制的起重机控制装置50、和对焚烧炉1内的废弃物的燃烧进行控制的燃烧控制装置20。
以装载于搬送车辆22的状态搬入的废弃物被从平台21投入垃圾坑3内,并存放于垃圾坑3内。存放于垃圾坑3内的废弃物由起重机5搅拌,并且由起重机5搬送至料斗4,经由料斗4被投入焚烧炉1内部,在焚烧炉1内部被焚烧处理。
如图1所示,在废弃物处理厂100设有对垃圾坑3内的影像进行拍摄的拍摄装置6、和对垃圾坑3内的废弃物的种类进行识别的信息处理装置10。
拍摄装置6配置于垃圾坑3的上方,在图示例中固定于起重机5的轨道,能够从垃圾坑3的上方对存放于垃圾坑3内的废弃物进行拍摄。图4是表示通过由拍摄装置6对垃圾坑3内的影像进行拍摄所得到的图像数据的一例的图。
拍摄装置6既可以是输出废弃物的形状及色彩图像数据来作为拍摄结果的RGB相机,也可以是输出废弃物的近红外线图像数据来作为拍摄结果的近红外线相机,还可以是拍摄废弃物的三维图像数据来作为拍摄结果的3D相机或RGB-D相机,还可以是它们中的两个以上的组合。
接着,说明对垃圾坑3内的废弃物的种类进行识别的信息处理装置10的结构。图2是表示信息处理装置10的结构的框图。此外,信息处理装置10的至少一部分由计算机实现。
如图2所示,信息处理装置10具有控制部11、存储部12和通信部13。各部以经由总线能够互相通信的方式连接。
其中,通信部13是拍摄装置6、起重机控制装置50及燃烧控制装置20的各装置与信息处理装置10之间的通信接口。通信部13在拍摄装置6、起重机控制装置50及燃烧控制装置20的各装置与信息处理装置10之间收发信息。
存储部12是例如硬盘等的固定型数据存储器。在存储部12内存储由控制部11处理的各种数据。另外,在存储部12内存储由后述的识别算法生成部11a生成的识别算法12a、和由后述的图像数据获取部11b获取的图像数据12b。
控制部11是进行信息处理装置10的各种处理的控制单元。如图2所示,控制部11具有识别算法生成部11a、图像数据获取部11b、种类识别部11c、处理厂控制部11d、滚落检测部11e、和异物投入检测部11f。这各部既可以通过由信息处理装置10内的处理器执行规定的程序来实现,也可以以硬件进行安装。
识别算法生成部11a学习在通过对存放废弃物的垃圾坑内的影像进行拍摄所得到的过去的图像数据上标记有废弃物的种类的训练数据,由此,生成将垃圾坑内的新图像数据作为输入并对废弃物的种类进行识别的学习完毕的识别算法12a。
识别算法生成部11a也可以学习在垃圾坑内的过去的图像数据上标记有废弃物的种类、且按种类标记有废弃物以外的识别对象的训练数据,由此,生成将垃圾坑内的过去的图像数据作为输入并对废弃物的种类以及废弃物以外的识别对象的种类进行识别的学习完毕的识别算法12a。
具体而言,识别算法12a例如包括使用了线性回归、玻尔兹曼机、神经网络、支持向量机、贝叶斯网络、稀疏回归、决策树、随机森林的统计学推定、强化学习、和深度学习中的一个或两个以上。
训练数据例如通过以下方式生成:进行废弃物处理厂100的运转的熟练操作员针对通过拍摄垃圾坑3内的影像所得到的图像数据,以目视识别废弃物及废弃物以外的识别对象并按种类进行标记,由此生成训练数据。废弃物及废弃物以外的识别对象的种类例如作为按种类区分的图层以重叠在图像数据上的状态被标记。
训练数据中标记的废弃物的种类可以包括垃圾袋未破袋垃圾、废纸、修剪枝、被褥、污泥、粗大破碎垃圾、瓦楞纸、麻袋、纸袋、和底部垃圾(存在于垃圾坑3内的底部附近且被上方的废弃物压缩并且含水量多的垃圾)中的一个或两个以上。另外,训练数据中标记的废弃物的种类也可以包括不希望进入垃圾坑3内但有可能进入的计划外的废弃物(异常物)。在此,作为异常物例如可以列举不可焚烧的物质,具体而言,例如可以列举荧光灯、混入汞的垃圾、高压储气瓶或汽锅、油箱等易爆物等。另外,训练数据中标记的废弃物的种类还可以包括木屑、纤维垃圾、衣物垃圾、塑料垃圾、动物性残渣、动物尸体、厨余垃圾、草木、土壤、医疗垃圾、焚烧灰、自行车、橱柜、床、架子、桌子、椅子、农业乙烯类、PET瓶、发泡聚苯乙烯、肉骨粉、农作物、陶器、玻璃碎片、金属碎片、瓦砾类、混凝土碎块、榻榻米、竹子、稻草、活性炭中的一个或两个以上。
训练数据中标记的废弃物以外的识别对象的种类可以包括废弃物处理厂100的房梁、垃圾坑3的侧壁、存放于垃圾坑3内的废弃物堆的陡立面(在废弃物堆的陡立面处暗到无法以目视识别废弃物的种类的程度的部分)、和进行上述废弃物的搅拌或搬送的起重机5中的一个或两个以上。另外,训练数据中标记的废弃物以外的识别对象的种类也可以包括作业人员和搬入车辆中的一方或两方。另外,训练数据中标记的废弃物以外的识别对象的种类也可以包括废弃物处理厂100的墙壁、柱子、地板、窗户、天花板、门、台阶、桁架(悬挂起重机5使其移动的构造体)、走廊、垃圾坑的分隔壁、垃圾投入料斗、搬入门、作业人员、搬入车辆中的一个或两个以上。
图5是表示在通过对垃圾坑内的影像进行拍摄所得到的图像数据上标记有废弃物及废弃物以外的识别对象的种类的训练数据的一例的图。在图5的示例中,在通过对垃圾坑内的影像进行拍摄所得到的图像数据上,作为废弃物而分别按种类标记有未破袋垃圾、修剪枝、被褥,并且作为废弃物以外的识别对象而分别按种类标记有起重机5、废弃物堆的陡立面、垃圾坑3的侧壁、处理厂100的地板。
图像数据获取部11b从拍摄装置6获取通过对垃圾坑3内的影像进行拍摄所得到的新图像数据。由图像数据获取部11b获取的新图像数据存储于存储部12内。
种类识别部11c将由图像数据获取部11b获取的新图像数据作为输入,并利用由识别算法生成部11a生成的学习完毕的识别算法12a,来识别存放于垃圾坑3内的废弃物的种类。
种类识别部11c也可以将由图像数据获取部11b获取的新图像数据作为输入,并利用学习完毕的识别算法12a,识别存放于垃圾坑3内的废弃物的种类和废弃物以外的识别对象的种类。图6是表示在通过对垃圾坑内的影像进行拍摄所得到的图像数据上重叠显示有基于种类识别部11c的识别结果的数据的一例的图。在图6的示例中,由种类识别部11c识别出的废弃物(未破袋垃圾、修剪枝)和废弃物以外的识别对象(起重机5、废弃物堆的陡立面、垃圾坑3的侧壁、处理厂100的地板)按种类重叠显示在图像数据上。
种类识别部11c也可以如图7所示,基于识别结果而生成图表,该图表在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率。在图7的示例中,垃圾坑3内被划分成5×4的格子状,并在每个区域内显示有由种类识别部11c识别出的废弃物的种类的比率。
处理厂控制部11d基于种类识别部11c的识别结果进行废弃物处理厂100的控制。
在图1的示例中,处理厂控制部11d包括:起重机控制部11d1,其向对进行废弃物的搅拌或搬送的起重机5进行控制的起重机控制装置50发送种类识别部11c的识别结果(即从图像数据中识别出的废弃物的种类的信息);和燃烧控制部11d2,其向对废弃物的燃烧进行控制的燃烧控制装置20发送种类识别部11c的识别结果(即从图像数据中识别出的废弃物的种类的信息)。
此外,在图1的示例中,处理厂控制部11d包括起重机控制部11d1和燃烧控制部11d2两方,但并不限定于此,也可以仅包括起重机控制部11d1和燃烧控制部11d2中的某一方。
起重机控制部11d1例如将在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率的图表(参照图7)作为种类识别部11c的识别结果发送至起重机控制装置50。起重机控制装置50基于从起重机控制部11d1接收的图表,以使废弃物的种类的比率在全部区域内相等的方式使起重机5动作,搅拌垃圾坑3内的废弃物。
燃烧控制部11d2例如将在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率的图表(参照图7)作为种类识别部11c的识别结果发送至燃烧控制装置20。燃烧控制装置20基于从燃烧控制部11d2接收的图表,掌握由起重机5抓持并从垃圾坑3一起搬送至料斗4的废弃物的种类的比率,并根据经由料斗4一起投入焚烧炉1内的废弃物的比率对废弃物的燃烧进行控制(例如对炉排的进给速度或供给的空气量进行控制)。
滚落检测部11e基于种类识别部11c的识别结果(即从图像数据中识别出的作业人员或搬送车辆的信息)对作业人员或搬送车辆从平台21向垃圾坑3内的滚落进行检测。滚落检测部11e可以向对存放废弃物的垃圾坑3内存在作业人员或搬入车辆的情况进行检测的滚落检测装置(未图示)发送种类识别部11c的识别结果(即从图像数据中识别出的作业人员或搬送车辆的信息)。滚落检测装置(未图示)基于从滚落检测部11e发送的种类识别部11c的识别结果,发出警报或使起重机5动作以进行作业人员的解救。
异物投入检测部11f基于种类识别部11c的识别结果(即从图像数据中识别出的废弃物的种类的信息)对投入到垃圾坑3内的异常物进行检测。在此,“异常物”是指不希望进入垃圾坑3内但有可能进入的计划外的废弃物,例如可以列举不可焚烧的物质,具体而言,例如可以列举荧光灯、混入汞的垃圾、高压储气瓶或汽锅、油箱等易爆物等。异物投入检测部11f可以向对投入到存放废弃物的垃圾坑3内的异常物进行检测的异物检测装置(未图示)发送种类识别部的识别结果(即从图像数据中识别出的废弃物的种类的信息)。异物检测装置(未图示)参照将向垃圾坑3内投入了废弃物的作业人员或车辆与时间信息一起存储的数据库,并基于从异物投入检测部11f发送的种类识别部11c的识别结果,对向垃圾坑3内投入了异物的作业人员或车辆进行特定。
接着,说明由这种结构构成的信息处理装置10的信息处理方法的一例。图3是表示信息处理方法的一例的流程图。
如图3所示,首先,识别算法生成部11a学习在对垃圾坑3内的影像进行拍摄所得到的过去的图像数据上标记有废弃物的种类的训练数据,由此,生成将通过对垃圾坑3内的影像进行拍摄所得到的新图像数据作为输入并对废弃物的种类进行识别的学习完毕的识别算法12a(步骤S11)。
识别算法生成部11a也可以学习在通过对垃圾坑3内的影像进行拍摄所得到的过去的图像数据上标记有废弃物的种类、且按种类标记有废弃物以外的识别对象的训练数据(例如参照图5),由此,生成将通过对垃圾坑3内的影像进行拍摄所得到的新图像数据作为输入并对废弃物的种类以及废弃物以外的识别对象的种类进行识别的学习完毕的识别算法12a。
接着,图像数据获取部11b从拍摄装置6获取通过对垃圾坑3内的影像进行拍摄所得到的新图像数据12b(例如参照图4)(步骤S12)。由图像数据获取部11b获取的新图像数据12b存储于存储部12内。
接着,种类识别部11c将由图像数据获取部11b获取的新图像数据作为输入,并利用由识别算法生成部11a生成的学习完毕的识别算法12a,识别存放于垃圾坑3内的废弃物的种类(步骤S13)。
种类识别部11c也可以将由图像数据获取部11b获取的新图像数据(例如参照图4)作为输入,并利用由识别算法生成部11a生成的学习完毕的识别算法12a,识别存放于垃圾坑3内的废弃物的种类和废弃物以外的识别对象的种类(例如参照图6)。另外,种类识别部11c也可以基于废弃物的种类的识别结果而生成图表,该图表在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率(例如参照图7)。
接着,处理厂控制部11d基于种类识别部11c的识别结果进行废弃物处理厂的控制。
具体而言,例如起重机控制部11d1向对进行废弃物的搅拌或搬送的起重机5进行控制的起重机控制装置50发送图7所示的在每个区域内显示废弃物的种类的比率的图表作为种类识别部11c的识别结果(步骤S14)。起重机控制装置50基于从起重机控制部11d1接收的图表,以使废弃物的种类的比率在全部区域内相等的方式使起重机5动作,搅拌垃圾坑3内的废弃物。
另外,燃烧控制部11d2向对废弃物的燃烧进行控制的燃烧控制装置20发送图7所示的在每个区域内显示废弃物的种类的比率的图表作为种类识别部11c的识别结果(步骤S15)。燃烧控制装置20基于从燃烧控制部11d2接收的图表,掌握由起重机5抓持并从垃圾坑3一起搬送至料斗4的废弃物的种类的比率,并根据经由料斗4一起投入焚烧炉1内的各废弃物的比率对废弃物的燃烧进行控制(例如对炉排的进给速度或供给的空气量进行控制)。
此外,也可以是,在由种类识别部11c从垃圾坑3内的图像数据中识别出作业人员或搬送车辆的情况下,滚落检测部11e基于种类识别部11c的识别结果对作业人员或搬送车辆从平台21向垃圾坑3内的滚落进行检测,并向滚落检测装置(未图示)发送种类识别部11c的识别结果。
另外,也可以是,在由种类识别部11c从垃圾坑3内的图像数据中检测出异常物的情况下,异物投入检测部11f基于种类识别部11c的识别结果对投入到垃圾坑3内的异常物进行检测,并向异物检测装置(未图示)发送种类识别部11c的识别结果。
此外,在日本特开2007-126246号公报中提出了一种根据色调区分一般垃圾和异质垃圾的方法,但难以单纯仅以色调识别废弃物的种类,例如即使掺杂了一些粗大破碎垃圾也有可能整体判断为一般垃圾。因此,存在向焚烧炉内投入一定量以上的对燃烧状态造成影响的异质的废弃物或成为各设备发生故障的主要原因的废弃物的危险性。
另外,在日本特开2015-124955号公报中提出了一种根据亮度值检测垃圾袋的破损程度的方法,但在该方法中只能检测垃圾袋。在实际的垃圾坑内,除了垃圾袋以外有时还会投入修剪枝、被褥等各种各样的废弃物,因此,难以将上述方法应用于这种实际的垃圾坑。
相对于此,根据本实施方式,将通过对垃圾坑3内的影像进行拍摄所得到的图像数据作为输入,并利用通过机器学习而生成的学习完毕的识别算法12a来识别存放于垃圾坑3内的废弃物的种类,由此,能够识别若投入一定量以上则会对燃烧状态造成影响的废弃物(例如未破袋垃圾)、成为各设备故障的主要原因的废弃物(例如修剪枝)。由此,能够防止误投入一定量以上的那种特殊废弃物,能够不对燃烧状态及各设备造成影响地进行稳定的处理。
另外,根据本实施方式,识别算法生成部11a学习在通过对垃圾坑3内的影像进行拍摄所得到的过去的图像数据上标记有废弃物的种类、且按种类标记有废弃物以外的识别对象的训练数据,由此生成学习完毕的识别算法12a;种类识别部11c将由图像数据获取部11b获取的新图像数据作为输入,并利用该识别算法12a识别存放于垃圾坑3内的废弃物的种类和废弃物以外的识别对象的种类。本案发明人在实际验证后,确认了通过这种方式能够显著提高废弃物的识别精度。根据本案发明人的研究,考虑这是由于种类识别部11c能够抑制迷惑于对废弃物以外的识别对象的判断而将其识别为某种废弃物,例如迷惑于对垃圾坑3的侧壁的判断而将其识别为污泥。
此外,能够对上述实施方式施加各种各样的变更。以下,说明上述实施方式的变形例。
在上述实施方式中,燃烧控制部11d2将在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率的图表(参照图7)作为种类识别部11c的识别结果发送至燃烧控制装置20,但并不限定于此,也可以将在每个区域内显示将废弃物的种类的比率转换为组成信息而得到的标签、例如投入OK、投入NG、卡路里L(低)、M(中)、H(高)等的图表作为种类识别部11c的识别结果发送至燃烧控制装置20。另外,燃烧控制部11d2还可以将表示对燃烧状态造成影响的比例大的标签(例如有未破袋垃圾、有底部垃圾等)作为种类识别部11c的识别结果发送至燃烧控制装置20。同样地,起重机控制部11d1也可以将表示对各设备造成影响的比例大的标签(例如有修剪枝、有粗大破碎垃圾等)作为种类识别部11c的识别结果发送至起重机控制装置50。
在种类识别部11c中,当基于识别结果而生成在每个区域内显示存放于垃圾坑3内的废弃物的种类的比率的图表时,可以针对由图像数据获取部11b获取的图像数据将图像数据简单地进行区域划分来显示废弃物的种类的比率,也可以将图像数据与垃圾坑3的编号分配进行关联并针对每个编号显示废弃物的种类的比率。
作为将图像数据与起重机编号进行关联的方法,在能够相对于垃圾坑3测量相对位置的起重机5上预先标注标记,拍摄装置6将标注了标记的起重机5拍摄进大量图像中,由此,种类识别部11c基于拍摄有标注了标记的起重机5的大量图像来推定拍摄装置6相对于垃圾坑3的相对位置和方向,并根据所推定的拍摄装置6的位置和拍摄方向来推定图像数据上的像素存在于哪个编号。或者,也可以是,拍摄装置6将相对于垃圾坑3能够测量相对位置的起重机5拍摄进大量图像中,且种类识别部11c在图像中的起重机5上标注标记,由此,基于在该起重机5上标注了标记的大量图像来推定拍摄装置6相对于垃圾坑3的相对位置和方向,并根据所推定的拍摄装置6的位置和拍摄方向来推定图像数据上的像素存在于哪个编号。
控制部11的一部分处理也可以不在信息处理装置10上进行,而是在信息处理装置10之外的云服务器上进行。存储部12的一部分也可以不处于信息处理装置10上,而是处于信息处理装置10之外的云服务器上。
例如,也可以在云服务器上执行识别算法生成部11a的处理以生成识别算法12a。另外,也可以利用由上述识别算法生成部11a在云服务器上生成的识别算法12a在云服务器上执行种类识别部11c的处理,还可以由信息处理装置10从云服务器中下载上述识别算法12a,并在信息处理装置10内利用其执行种类识别部11c的处理。
控制部11也可以定期监控种类识别部11c的识别结果,并判断是否需要进行识别算法12a的模型重新评估及更新。
例如,控制部11使用边缘服务器进行种类识别部11c的识别结果的正常·异常判定,在检测出异常的情况下,判断该图像数据及识别结果在焚烧炉1的运营上是否有问题。在判断为运营上有问题的情况下,熟练操作员对被检测出异常的图像数据再次按废弃物的种类进行标记,并重新准备训练数据,识别算法生成部11a学习重新准备的训练数据,生成识别算法12a。
起重机控制装置50也可以在从焚烧炉1收到投入要求时,基于从起重机控制部11d1接收的图表而从垃圾坑3内挑选满足以按垃圾种类区分的比率阈值为基础的投入基准的垃圾,并使起重机5动作而将垃圾向料斗4投入。
另外,起重机控制装置50也可以在从垃圾坑3内挑选满足投入基准的垃圾时,以该垃圾的按垃圾种类区分的比率与上次投入到料斗4内的垃圾的按垃圾种类区分的比率之间的差值变小的方式挑选垃圾。
起重机控制装置50也可以使用垃圾袋未破袋垃圾、废纸、修剪枝、被褥、污泥、粗大垃圾破碎物、瓦楞纸、麻袋、纸袋、底部垃圾、木屑、纤维垃圾、衣物垃圾、塑料垃圾、动物性残渣、动物尸体、厨余垃圾、草木、土壤、医疗垃圾、焚烧灰、农业乙烯类、PET瓶、发泡聚苯乙烯、肉骨粉、农作物、陶器、玻璃碎片、金属碎片、瓦砾类、混凝土碎块、榻榻米、竹子、稻草、和活性炭中的一个或两个以上的比率阈值作为上述投入基准的比率阈值。
另外,作为上述投入基准的决定方法,可以是,起重机控制装置50针对通过对过去的垃圾坑3内的影像进行拍摄所得到的图像数据,对由熟练操作员通过目视该图像数据所示的废弃物的组成并从燃烧稳定性及对设备的影响的观点出发而对可否投入加以分类且标注了标签的结果、与针对该图像数据使用种类识别部11c推定了垃圾的按种类区分的比率的结果进行比较,由此决定与熟练操作员判断可否投入相对应的按垃圾种类区分的比率阈值。
另外,起重机控制装置50也可以根据从起重机控制部11d1接收的、在每个区域内显示存放于垃圾坑3内的垃圾的种类的比率的图表,将实际投入到料斗4内的垃圾的按垃圾种类区分的比率数据与焚烧炉1的工艺数据进行关联,从而决定按垃圾种类区分的比率阈值,还可以将两个数据随时间变化进行关联以动态地变更比率阈值。
另外,也可以是,起重机控制装置50不仅基于上述工艺数据、还基于天气信息而动态地变更比率阈值。例如,起重机控制装置50若从天气信息中得知当天下雨,则以降低未破袋垃圾袋的比率阈值、或提高粗大垃圾破碎物的比率阈值这样的方式,使基于比率阈值的投入基准变更。
另外,起重机控制装置50也可以基于星期信息而动态地变更比率阈值。例如,起重机控制装置50从星期信息中得知星期日的垃圾坑3内的垃圾较少从而为了抑制垃圾焚烧量,而以提高未破袋垃圾袋的比率阈值这样的方式使基于比率阈值的投入量基准变更。
另外,起重机控制装置50也可以基于废弃物处理厂100的操炉计划值来动态地变更比率阈值。例如,若蒸发量从当前的蒸发量设定值下降,则起重机控制装置50以降低未破袋垃圾袋的比率阈值、或提高粗大垃圾破碎物的比率阈值这样的方式使基于比率阈值的投入基准变更。
起重机控制装置50在从焚烧炉1收到投入要求时,若从起重机控制部11d1接收的图表中不存在满足以按垃圾种类区分的比率阈值为基础的投入基准的垃圾,则也可以使起重机5动作而将接近投入基准的垃圾投入料斗4,还可以搅拌接近投入基准的垃圾而制成达到投入基准的垃圾。
起重机控制装置50也可以使起重机5动作而只将在从起重机控制部11d1接收的图表中满足以按垃圾种类区分的比率阈值为基础的投入基准的垃圾堆放到垃圾坑3的特定位置。由此,能够将满足投入基准的垃圾蓄积到垃圾坑3内。
起重机控制装置50也可以在从起重机控制部11d1接收的图表中根据按垃圾种类区分的比率阈值来检测存在于垃圾坑3内的对燃烧状态造成影响的废弃物(例如污泥)或成为各设备故障的主要原因的废弃物(例如修剪枝),并使起重机5动作而将该废弃物存放到垃圾坑3的特定位置,还可以将该废弃物散落到特定场所。
起重机控制装置50也可以在从起重机控制部11d1接收的图表中有不满足以按垃圾种类区分的比率阈值为基础的搅拌基准的垃圾存在于垃圾坑3内的情况下,使起重机5动作以搅拌该垃圾。上述搅拌基准既可以与投入基准相同也可以不同。
另外,起重机控制装置50也可以使用焚烧炉1的工艺数据、天气信息、星期信息、垃圾搬入作业人员信息、垃圾搬入量(总量或按垃圾种类区分的搬入量)信息、垃圾搬入速度、垃圾坑等级(整体、特定区域)信息、起重机运转状况(两台可运转、仅一台运转、当前一台运转中、当前两台运转中)信息、和垃圾收集车的收集路线·收集区域信息中的一个或两个以上来动态地变更上述搅拌基准。
起重机控制装置50也可以在从起重机控制部11d1接收的图表中根据每个区域的按垃圾种类区分的比率来判断垃圾坑3整体的搅拌状况,判断是否需要运转两台起重机5,并使起重机5动作以进行第二台起重机的运转开始或第二台起重机的收纳。
另外,在上述例子中是起重机控制装置50使起重机5动作,但也可以在起重机控制装置50的上游侧设有起重机操作判断装置(未图示),由起重机操作判断装置决定起重机5的动作内容,并向起重机控制装置50发送动作内容的指令,接收到指令的起重机控制装置50基于所接收的指令内容使起重机5动作。起重机操作判断装置在其与信息处理装置10之间及其与起重机控制装置50之间收发信息。或者,起重机操作判断装置也可以是信息处理装置10的一部分,即,信息处理装置10也可以包括起重机操作判断装置。
也可以是,起重机操作判断装置在从焚烧炉1发送来投入要求时从起重机控制装置50接收投入要求信号,基于从起重机控制部11d1接收的图表而从垃圾坑3内挑选满足以按垃圾种类区分的比率阈值为基础的投入基准的图表的垃圾,并向起重机控制装置50发送指令以将该垃圾投入料斗4,起重机控制装置50基于所接收的指令使起重机5动作。另外,也可以是,起重机操作判断装置在从垃圾坑内挑选满足投入基准的垃圾时,以该垃圾的按垃圾种类区分的比率与上次投入到料斗4内的垃圾的按垃圾种类区分的比率之间的差值变小的方式挑选垃圾。
也可以是,起重机操作判断装置在从焚烧炉1发送来投入要求时从起重机控制装置50接收投入要求信号,在从起重机控制部11d1接收的图表中不存在满足以按垃圾种类区分的比率阈值为基础的投入基准的垃圾的情况下,向起重机控制装置50发送指令以将接近投入基准的垃圾投入料斗4、或搅拌接近投入基准的垃圾而制成达到投入基准的垃圾,起重机控制装置50使起重机5动作。
也可以是,起重机操作判断装置向起重机控制装置50发送指令,以只将在从起重机控制部11d1接收的图表中满足以按垃圾种类区分的比率阈值为基础的投入基准的垃圾堆放到垃圾坑3内的特定位置,起重机控制装置50使起重机5动作。由此,能够将满足投入基准的垃圾蓄积到垃圾坑3内。
也可以是,起重机操作判断装置在从起重机控制部11d1接收的图表中,根据按垃圾种类区分的比率阈值来检测存在于垃圾坑3内的对燃烧状态造成影响的废弃物(例如污泥)或成为各设备故障的主要原因的废弃物(例如修剪枝),并向起重机控制装置50发送指令以将该废弃物存放到垃圾坑3内的特定位置、或将该废弃物散落到特定场所,起重机控制装置50使起重机5动作。
也可以是,起重机操作判断装置在从起重机控制部11d1接收的图表中有不满足以按垃圾种类区分的比率阈值为基础的搅拌基准的垃圾存在于垃圾坑3内的情况下,向起重机控制装置50发送指令以搅拌该垃圾,起重机控制装置50使起重机5动作。上述搅拌基准既可以与投入基准相同也可以不同。
也可以是,起重机操作判断装置在从起重机控制部11d1接收的图表中,根据每个区域的按垃圾种类区分的比率来判断垃圾坑3整体的搅拌状况,判断是否需要运转两台起重机5,并向起重机控制装置50发送指令,起重机控制装置50使起重机5动作,以进行第二台起重机的运转开始或第二台起重机的收纳。
此外,在上述实施方式中说明了对废弃物的种类进行识别的信息处理装置10使用于废弃物处理厂100的垃圾坑3的例子,但信息处理装置10的使用场所只要是存放废弃物的废弃物存放场所即可,并不限定于废弃物处理厂100的垃圾坑3,例如信息处理装置10也可以使用于回收设备的接收场所。
以上,通过例示对实施方式及变形例进行了说明,但本发明的范围并不限定于这些,能够在权利要求所记载的范围内根据目的而变更·变形。另外,各实施方式及变形例能够在不使处理内容矛盾的范围内适当组合。
另外,上述实施方式的信息处理装置10能够由一台或多台计算机构成,用于使一台或多台计算机实现信息处理装置10的程序及非暂时性(non-transitory)记录有该程序的记录介质也是本案的保护对象。
- 位置确定处理装置、位置确定处理方法、位置确定处理程序、移动信息处理装置、移动信息处理方法、移动信息处理程序和存储介质
- 信息处理装置、信息处理方法、信息处理程序以及记录有信息处理程序的记录介质