一种基于陀螺仪和屏蔽的地磁场的管道缺陷精准定位方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及缺陷检测领域,特别涉及一种利用陀螺仪进行缺陷定位,并且利用磁强计进行管道缺陷的二次确定的缺陷定位方法。
背景技术
在进行远距离油气传输时,由于腐蚀穿孔、疲劳破裂和外力破坏等原因会使得油气管道产生微小缺陷,特别管道环焊接处一直是管道最薄弱的部位。产生裂缝就容易引起油气泄露而导致安全事故的发生。因此对长输油气管道进行定期检测与评估是有必要的。漏磁内检测技术由于对运行环境要求不高,不需要耦合,且经济实惠,因此是目前应用最广泛也最成熟的技术。
漏磁检测技术是利用管道缺陷处磁感应线的变化来探测和量化缺陷的性质和质量。现有管道缺陷定位包括里程轮定位和时钟定位。其中,里程轮定位是一种主要的内检测定位方法,其可以得到漏磁检测器所检测到的缺陷处距离管口的距离,从而将缺陷定位到某一管道截面。然而,对于可将缺陷定位到该截面上具体点位置的时钟定位,由于陀螺仪精度的不足,实际工程中一般并不采用,现有管道漏磁内检查系统中的陀螺仪主要应用点为管道轨迹绘制。其原因是由于长输油气管道缺陷检测距离过长,陀螺仪误差将会持续累计,以至于得到错误的结果。
因此寻找一种可以消除陀螺仪误差的管道缺陷精准定位方法对油气输送管道的运营维护有着重要的意义。
发明内容
在进行缺陷的漏磁检测时,由于长输油气管道的检测距离一般很长,所以利用陀螺仪进行测量的误差将会持续累积。为克服上述缺陷,本发明提出了一种利用屏蔽的地磁场来间接测量清管器旋转角度,对陀螺仪误差进行校正的方法。
本发明是通过如下技术方案实现的:
一种基于陀螺仪和屏蔽的地磁场的管道缺陷检测方法,其步骤包括:
步骤A、对缺陷进行精确定位:
A1,利用安装在清管器上的陀螺仪测量清管器的旋转角度α;
A2,通过步骤A1测得的旋转角度α,再结合漏磁检测系统中的霍尔元件位置,进行缺陷位置的计算;
步骤B、对陀螺仪进行数据校正:
B1,将三轴陀螺仪和三轴磁强计安装在清管器上,并实现同步转动;
B2,结合当地实时地磁场,和管道的固有屏蔽系数,将屏蔽后的地磁场分解到管道坐标轴上;
B3,利用三轴磁强计测量当清管器旋转角度为α时的管道内磁场信息;
B4,根据三轴磁强计坐标轴和管道坐标轴的转换关系,建立方程组,便可间接计算出清管器的旋转角度α;
B5,将三轴磁强计间接测得的旋转角度与陀螺仪直接测得的旋转角度进行对比,便可对陀螺仪数据进行校正。
进一步的,在步骤A1中,其中陀螺仪的主要工作原理是首先利用陀螺仪计量清管器的转动角速度,进行一次积分后便可获得清管器的转动角度α;
进一步的,在步骤A2中,所述漏磁检测系统中的霍尔元件为24个,其标号为1~24,相邻霍尔元件与中心O的连线的夹角相等,为15°;缺陷在某环段相对于中心O的具体位置计算可用下式计算:
(y
式中,y
进一步的,在步骤B2中,设置管道的直角坐标系O-x
式中,e
进一步的,在步骤B3中,当清管器旋转角度为α时,利用三轴磁强计测量管道内的磁场,由三轴磁强计测得的管道内磁场坐标为(B
进一步的,在步骤B4中,在初始时设置三轴磁强计坐标轴和三轴陀螺仪的各个轴线依次平行;当清管器旋转角度为α时,通过下述公式间接的计算α的值:
解得:
式中,B
本发明带来的有益效果是:
本发明采用三轴磁强计进行屏蔽的地磁场的测量,间接得到清管器的旋转角度,校正陀螺仪的测量角度的方法,解决了陀螺仪的误差累积的问题,还能利用此方法解决长输油气管道缺陷的精确定位的难题,同时也是一种降低管道维护成本的经济,高效的检测方法。
附图说明
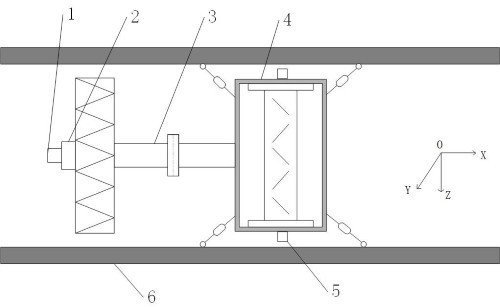
图1是管道缺陷精确检测示意图;
图2是地磁场的分解图;
图3是磁强计坐标与管道坐标示意图;
具体实施方式
下面将结合附图对本发明实施方式作进一步的描述。
本发明采用了陀螺仪对清管器进行旋转角度的测量,再结合漏磁检测系统检测到的缺陷性质和里程轮的数据,便可以对管道缺陷进行定位;再利用三轴磁强计对屏蔽后的地磁场进行测量,间接计算清管器的旋转角度;最后,对陀螺仪所测得的旋转角度与间接测得的旋转角度进行对比校正。该方法包括对缺陷进行精确定位与对陀螺仪进行数据校正两大步骤:
步骤A、对缺陷进行精确定位:
A1,利用安装在清管器上的陀螺仪测量清管器的旋转角度α;
A2,通过步骤A1测得的旋转角度α,再结合漏磁检测系统中的霍尔元件位置,进行缺陷位置的计算;
步骤B、对陀螺仪进行数据校正:
B1,将三轴陀螺仪和三轴磁强计安装在清管器上,并实现同步转动;
B2,结合当地实时地磁场,和管道的固有屏蔽系数,将屏蔽后的地磁场分解到管道坐标轴上;
B3,利用三轴磁强计测量当清管器旋转角度为α时的管道内磁场信息;
B4,根据三轴磁强计坐标轴和管道坐标轴的转换关系,建立方程组,便可间接计算出清管器的旋转角度α;
B5,将三轴磁强计间接测得的旋转角度与陀螺仪直接测得的旋转角度进行对比,便可对陀螺仪数据进行校正。
步骤A1)把陀螺仪安装在清管器上,其中清管器由两部分组成,前端为清管器的旋转角度测量部分,包括陀螺仪与磁强计,后端为清管器的漏磁检测系统部分,包括霍尔元件;其中陀螺仪与清管器同轴,且可实现与其同步转动,当清管器进行转动时,经陀螺仪可测得清管器的转动角度α,见图1,其中包括陀螺仪 (1)、三轴磁强计(2)、万向轴(3)、漏磁检测系统(4)、霍尔元件(5),长输管道(6);
步骤A2)通过步骤A1测得的旋转角度α,由里程轮定位方法能够得到漏磁检测器所检测到的缺陷处距离管口的距离,结合旋转角度α与检测到缺陷的霍尔元件的位置可以进行缺陷坐标相对于环段中心0位置的计算;所述漏磁检测系统中的霍尔元件为24个,其标号为1~24,相邻霍尔元件与中心O的连线的夹角相等,为15°;缺陷在某环段相对于中心O的具体位置计算可用下式计算:
(y
式中,y
步骤B、对陀螺仪数据进行校正:
步骤B1)把三轴磁强计安装在清管器上,并且其与清管器同轴,并能实现与清管器同步转动;
步骤B2)利用三轴磁强计测量管道内屏蔽后的地磁场Be,将屏蔽后的地磁场分解到管道坐标轴上,见图2。其中管道的直角坐标系为O-x
式中,e
步骤B3)当清管器旋转角度为α时,利用三轴磁强计测量管道内的磁场信息,由三轴磁强计测得的管道内磁场坐标为(B
步骤B4)通过B3中对管道内磁场信息的测量,可以对清管器的旋转角度α进行间接计算,见图3。在初始时设置三轴磁强计坐标轴和三轴陀螺仪的各个轴线依次平行。当清管器旋转角度为α时,通过下述公式间接的计算α的值:
解得:
式中,B
公式中,由于对衰减系数的标定需要已知管道的尺寸和走向,在实际中,投入使用的长输油气管道的各个参数是基本确定的,对于在工程中对管道走向进行确定的技术,也已经十分成熟,所以对旋转角度的计算是可以确定的;
步骤B5)通过步骤A1中陀螺仪所测得的旋转角度与步骤B4中由磁强计所间接测得的旋转角度进行对比,便能对陀螺仪所测得的角度进行数据校正,防止因陀螺仪的误差累积导致得到错误的旋转角度所带来的严重后果。
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者同等替换,而未脱离本发明精神和范围的任何修改或者同等替换,其均应涵盖在本发明的权利要求范围内。
- 一种基于陀螺仪和屏蔽的地磁场的管道缺陷精准定位方法
- 一种基于陀螺仪和屏蔽的地磁场的管道缺陷定位装置