一种环境修复工程机器人
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及机器人,更具体的说是一种环境修复工程机器人。
背景技术
例如公开号为CN105965547A一种用于环境监测、环境应急处置和环境修复的工程机器人,其包括机器视觉、自报警、远程操控、GPS实时定位、空气质量检测、土壤地下水采样检测及原位修复、风险识别、环境专家系统、数据处理中心、机器人主体和移动装置;其中,机器视觉系、自报警、远程操控、GPS实时定位、空气质量检测、土壤地下水采样检测及原位修复、风险识别、环境专家系统、移动装置均与数据处理中心连接;土壤地下水采样检测及原位修复装置还设置有钻杆自动填装装置;该发明集成土壤地下水环境风险检测和原位修复、环境质量快速检测、机器视觉、远程操控、GPS实时定位、风险识别和环境专家系统等多种先进技术于一体,结构更加简化,功能更加全面;但该机器人不能对树木进行修复。
发明内容
本发明的目的是提供一种环境修复工程机器人,可以对树木进行修复。
本发明的目的通过以下技术方案来实现:
一种环境修复工程机器人,包括方台、电动推杆Ⅰ、杆架、杆、基臂Ⅱ、动臂、配合架、电机架、电机Ⅲ和磨切盘,所述方台的左端固接电动推杆Ⅰ,电动推杆Ⅰ的活动端固接杆架,杆的两端分别转动连接在杆架上端的前后两端,基臂Ⅱ固接在方台右端的上端,基臂Ⅱ的左端转动连接动臂,动臂的下端固接配合架,配合架上设有与杆配合的长条槽口,杆位于所述长条槽口内,动臂的左端固接电机架,电机架上固接电机Ⅲ,电机Ⅲ的输出轴转动连接在电机架上,磨切盘固接在电机Ⅲ输出轴的左端,磨切盘位于电机架的左侧。
所述磨切盘的左端面为磨砂面。
所述磨切盘在周向上设有一周刀刃。
该环境修复工程机器人还包括基臂Ⅰ、圆台和电机Ⅱ,所述基臂Ⅰ上端的左侧转动连接圆台,电机Ⅱ固接在基臂Ⅰ的下端,电机Ⅱ的输出轴与圆台下端的中心固接,方台固接在圆台上。
该环境修复工程机器人还包括底板、电机Ⅳ、丝杠、限位架、限位杆和限位头,所述底板的上端固接电机Ⅳ,电机Ⅳ的输出轴上固接丝杠,底板上固接两个限位架,基臂Ⅰ右端的前后两端均固接一个限位杆,两个限位杆的外端均一体连接一个限位头,两个限位杆上均由上至下设有与限位头能够配合的限位口,两个限位头分别滑动连接在两个所述的限位口内,基臂Ⅰ与丝杠螺纹连接。
该环境修复工程机器人还包括平板、凸轨、边凸Ⅰ和轮组,所述平板上端的左右两侧均固接一个凸轨,每个凸轨下端的左右两端均设有一体连接的边凸Ⅰ,底板的下端安装有轮组,所述轮组包括包架、边凸Ⅱ和导轮,包架下端的左右两端均一体连接有向内延伸的边凸Ⅱ,导轮转动连接在包架内,导轮的左右两端均固接有限位环;所述轮组设有四个,四个包架固接在底板下端的四角处,导轮滚动在对应位置的凸轨上,每个导轮上的两个限位环的内端分别与对应位置上凸轨的左右两端滑动贴合,每个包架上的两个边凸Ⅱ的上端面分别与对应位置上的两个边凸Ⅰ的下端面滑动贴合。
该环境修复工程机器人还包括齿条、电机Ⅰ和齿轮,所述平板的上端固接齿条,底板的下端固接电机Ⅰ,电机Ⅰ的输出轴上固接齿轮,齿轮与齿条啮合传动。
所述平板的下端安装移动底盘。
该环境修复工程机器人还包括搭架、电动推杆Ⅱ、电机Ⅴ、底片、海绵头、桶、伸缩软管和涂管,动臂的上端固接搭架,搭架的上端固接电动推杆Ⅱ,电动推杆Ⅱ的活动端固接电机Ⅴ,电机Ⅴ的输出轴固接底片,底片的左端固接海绵头,桶的上端固接有能够拆卸的盖子,伸缩软管的一端位于桶内部的下侧,伸缩软管能够通过泵将桶内的液体抽送至伸缩软管的另一端,伸缩软管的另一端固接并连通涂管的一端,涂管的另一端与海绵头的上端滑动贴合。
所述海绵头的材质为多孔化工海绵。
本发明一种环境修复工程机器人的有益效果为:
利用磨切盘的外圈边端对因病、虫、冻、日灼等造成的伤口树木枝干进行切割,切割后,利用磨切盘的左端面对树木上留下的切割面进行打磨平滑,且打磨使皮层边缘呈弧形,利于将药剂均匀涂抹在切割面上,提升药效;磨切盘在纵向和水平方向上的切割或打磨的角度可以调节,进而对纵向或水平方向上延伸角度不同的枝干进行切割以及对树皮边缘打磨;海绵头的角度能够与磨切盘实现同步调节,海绵头用于将药剂均匀快速的涂抹在切割面上。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
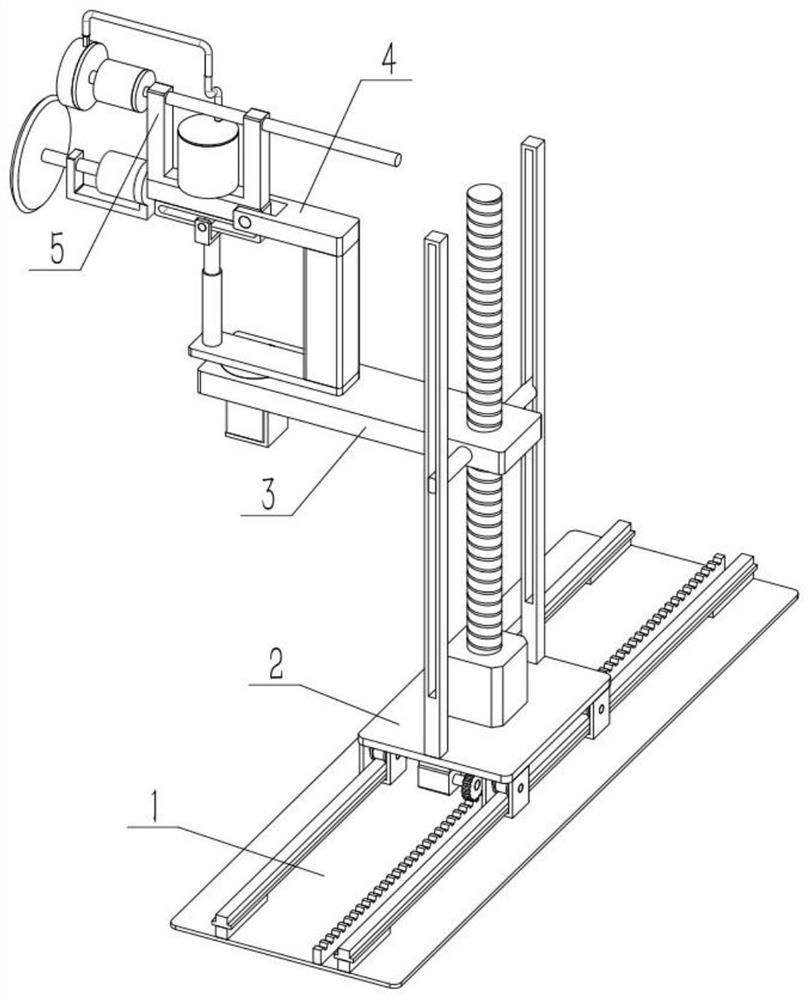
图1是本发明一种环境修复工程机器人的整体结构示意图;
图2是本发明的部分结构示意图一;
图3是本发明的部分结构示意图二;
图4是本发明的部分结构示意图三;
图5是本发明的部分结构示意图四;
图6是本发明的部分结构示意图五;
图7是本发明的部分结构示意图六。
图中:平板1、凸轨101、边凸Ⅰ102、齿条103、底板2、包架201、边凸Ⅱ202、导轮203、电机Ⅰ204、齿轮205、电机Ⅳ206、丝杠207、限位架208、基臂Ⅰ3、限位杆301、限位头302、圆台303、电机Ⅱ304、方台305、电动推杆Ⅰ306、杆架307、杆308、基臂Ⅱ4、动臂401、配合架402、电机架403、电机Ⅲ404、磨切盘405、搭架5、电动推杆Ⅱ501、电机Ⅴ502、底片503、海绵头504、桶505、伸缩软管506、涂管507。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
下面结合附图对本发明作进一步详细说明。
具体实施方式一:
如图所示,一种环境修复工程机器人,包括方台305、电动推杆Ⅰ306、杆架307、杆308、基臂Ⅱ4、动臂401、配合架402、电机架403、电机Ⅲ404和磨切盘405,所述方台305的左端固接电动推杆Ⅰ306,电动推杆Ⅰ306的活动端固接杆架307,杆308的两端分别转动连接在杆架307上端的前后两端,基臂Ⅱ4固接在方台305右端的上端,基臂Ⅱ4的左端转动连接动臂401,动臂401的下端固接配合架402,配合架402上设有与杆308配合的长条槽口,杆308位于所述长条槽口内,动臂401的左端固接电机架403,电机架403上固接电机Ⅲ404,电机Ⅲ404的输出轴转动连接在电机架403上,磨切盘405固接在电机Ⅲ404输出轴的左端,磨切盘405位于电机架403的左侧。启动电机Ⅲ404,电机Ⅲ404的输出轴带动磨切盘405转动,利用磨切盘405的外圈边端对因病、虫、冻、日灼等造成的伤口树木枝干进行切割,切割后,利用磨切盘405的左端面对树木上留下的切割面进行打磨平滑,且打磨使皮层边缘呈弧形,利于将药剂均匀涂抹在切割面上,提升药效。启动电动推杆Ⅰ306使杆308实现升降,进而利用杆308带动配合架402实现上下摆动,其结果是改变磨切盘405在纵向上的切割或打磨的角度,进而对纵向上延伸角度不同的枝干进行切割,进而切割面所在的虚拟轴线与该枝干所在的虚拟轴线重合,除了切割后美观外,有利于该切割面的后续生长;以及将皮层边缘打磨呈弧形。
具体实施方式二:
如图所示,所述磨切盘405的左端面为磨砂面。磨砂面打磨树皮效率更高。
具体实施方式三:
如图所示,所述磨切盘405在周向上设有一周刀刃。刀刃切割树干等部位后切割面较为平滑。
具体实施方式四:
如图所示,该环境修复工程机器人还包括基臂Ⅰ3、圆台303和电机Ⅱ304,所述基臂Ⅰ3上端的左侧转动连接圆台303,电机Ⅱ304固接在基臂Ⅰ3的下端,电机Ⅱ304的输出轴与圆台303下端的中心固接,方台305固接在圆台303上。因日照的原因,树干通常朝上延伸,对于个别在水平面上延伸的树干进行切割时,启动电机Ⅱ304,电机Ⅱ304的输出轴带动圆台303转动,圆台303带动方台305转动,方台305带动方台305转动,其结果是改变磨切盘405在水平方向上的切割或打磨的角度。
具体实施方式五:
如图所示,该环境修复工程机器人还包括底板2、电机Ⅳ206、丝杠207、限位架208、限位杆301和限位头302,所述底板2的上端固接电机Ⅳ206,电机Ⅳ206的输出轴上固接丝杠207,底板2上固接两个限位架208,基臂Ⅰ3右端的前后两端均固接一个限位杆301,两个限位杆301的外端均一体连接一个限位头302,两个限位杆301上均由上至下设有与限位头302能够配合的限位口,两个限位头302分别滑动连接在两个所述的限位口内,基臂Ⅰ3与丝杠207螺纹连接。启动电机Ⅳ206,电机Ⅳ206带动丝杠207转动,丝杠207带动基臂Ⅰ3升降,其结果是改变磨切盘405的高度,进而可以对不同高度的枝干进行切割或打磨。
具体实施方式六:
如图所示,该环境修复工程机器人还包括平板1、凸轨101、边凸Ⅰ102和轮组,所述平板1上端的左右两侧均固接一个凸轨101,每个凸轨101下端的左右两端均设有一体连接的边凸Ⅰ102,底板2的下端安装有轮组,所述轮组包括包架201、边凸Ⅱ202和导轮203,包架201下端的左右两端均一体连接有向内延伸的边凸Ⅱ202,导轮203转动连接在包架201内,导轮203的左右两端均固接有限位环;所述轮组设有四个,四个包架201固接在底板2下端的四角处,导轮203滚动在对应位置的凸轨101上,每个导轮203上的两个限位环的内端分别与对应位置上凸轨101的左右两端滑动贴合,每个包架201上的两个边凸Ⅱ202的上端面分别与对应位置上的两个边凸Ⅰ102的下端面滑动贴合。利用底板2能够前后运动,其结果是使磨切盘405进行前后运动,当枝干较粗,磨切盘405无法通过单一方向的运动对其进行切割时,可以利用磨切盘405对枝干在纵向方向的边端进行切割,随后利用磨切盘405对枝干在水向方向的边端进行切割。
具体实施方式七:
如图所示,该环境修复工程机器人还包括齿条103、电机Ⅰ204和齿轮205,所述平板1的上端固接齿条103,底板2的下端固接电机Ⅰ204,电机Ⅰ204的输出轴上固接齿轮205,齿轮205与齿条103啮合传动。启动电机Ⅰ204,电机Ⅰ204的输出轴带动齿轮205转动,齿轮205在齿条103上沿前后方向上移动,进而使底板2进行高效精准的前后运动。
具体实施方式八:
如图所示,所述平板1的下端安装移动底盘。所述移动底盘优选能够控制行走的橡胶轮胎或履带底盘,在市场上采购已有的产品即可,进而在对树木进行修复时,仅需要设备进行整体的靠近或远离树木即可,其他的精细的微调修复操作通过上述其他结构实现。
具体实施方式九:
如图所示,该环境修复工程机器人还包括搭架5、电动推杆Ⅱ501、电机Ⅴ502、底片503、海绵头504、桶505、伸缩软管506和涂管507,动臂401的上端固接搭架5,搭架5的上端固接电动推杆Ⅱ501,电动推杆Ⅱ501的活动端固接电机Ⅴ502,电机Ⅴ502的输出轴固接底片503,底片503的左端固接海绵头504,桶505的上端固接有能够拆卸的盖子,伸缩软管506的一端位于桶505内部的下侧,伸缩软管506能够通过泵将桶505内的液体抽送至伸缩软管506的另一端,伸缩软管506的另一端固接并连通涂管507的一端,涂管507的另一端与海绵头504的上端滑动贴合。桶505内用于储存药剂,对枝干的切割面进行切割打磨后,利用泵将药剂抽取到涂管507上,涂管507将药剂引在海绵头504上,启动电机Ⅴ502,电机Ⅴ502使海绵头504自转,进而海绵头504将药剂均匀涂抹在所述切割面上,海绵头504的角度能够与磨切盘405实现同步调节,通过启动电动推杆Ⅱ501,电动推杆Ⅱ501使电机Ⅴ502左右运动,进而海绵头504可以左右运动,当海绵头504位于磨切盘405的左侧,实现海绵头504的使用,当海绵头504位于磨切盘405的右侧,实现磨切盘405的使用。涂管507通过机架安装在电机Ⅴ502上,即所述机架与电机Ⅴ502外壳固接,涂管507连接在所述机架上,为了便于观察涂管507的结构与位置,所述机架在图中未显示。
具体实施方式十:
如图所示,所述海绵头504的材质为多孔化工海绵。
本发明的一种环境修复工程机器人,其工作原理为:
启动电机Ⅲ404,电机Ⅲ404的输出轴带动磨切盘405转动,利用磨切盘405的外圈边端对因病、虫、冻、日灼等造成的伤口树木枝干进行切割,切割后,利用磨切盘405的左端面对树木上留下的切割面进行打磨平滑,且打磨使皮层边缘呈弧形,利于将药剂均匀涂抹在切割面上,提升药效。启动电动推杆Ⅰ306使杆308实现升降,进而利用杆308带动配合架402实现上下摆动,其结果是改变磨切盘405在纵向上的切割或打磨的角度,进而对纵向上延伸角度不同的枝干进行切割,进而切割面所在的虚拟轴线与该枝干所在的虚拟轴线重合,除了切割后美观外,有利于该切割面的后续生长;以及将皮层边缘打磨呈弧形。磨砂面打磨树皮效率更高。刀刃切割树干等部位后切割面较为平滑。因日照的原因,树干通常朝上延伸,对于个别在水平面上延伸的树干进行切割时,启动电机Ⅱ304,电机Ⅱ304的输出轴带动圆台303转动,圆台303带动方台305转动,方台305带动方台305转动,其结果是改变磨切盘405在水平方向上的切割或打磨的角度。启动电机Ⅳ206,电机Ⅳ206带动丝杠207转动,丝杠207带动基臂Ⅰ3升降,其结果是改变磨切盘405的高度,进而可以对不同高度的枝干进行切割或打磨。利用底板2能够前后运动,其结果是使磨切盘405进行前后运动,当枝干较粗,磨切盘405无法通过单一方向的运动对其进行切割时,可以利用磨切盘405对枝干在纵向方向的边端进行切割,随后利用磨切盘405对枝干在水向方向的边端进行切割。启动电机Ⅰ204,电机Ⅰ204的输出轴带动齿轮205转动,齿轮205在齿条103上沿前后方向上移动,进而使底板2进行高效精准的前后运动。所述移动底盘优选能够控制行走的橡胶轮胎或履带底盘,在市场上采购已有的产品即可,进而在对树木进行修复时,仅需要设备进行整体的靠近或远离树木即可,其他的精细的微调修复操作通过上述其他结构实现。桶505内用于储存药剂,对枝干的切割面进行切割打磨后,利用泵将药剂抽取到涂管507上,涂管507将药剂引在海绵头504上,启动电机Ⅴ502,电机Ⅴ502使海绵头504自转,进而海绵头504将药剂均匀涂抹在所述切割面上,海绵头504的角度能够与磨切盘405实现同步调节,通过启动电动推杆Ⅱ501,电动推杆Ⅱ501使电机Ⅴ502左右运动,进而海绵头504可以左右运动,当海绵头504位于磨切盘405的左侧,实现海绵头504的使用,当海绵头504位于磨切盘405的右侧,实现磨切盘405的使用。涂管507通过机架安装在电机Ⅴ502上,即所述机架与电机Ⅴ502外壳固接,涂管507连接在所述机架上,为了便于观察涂管507的结构与位置,所述机架在图中未显示。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种环境修复工程机器人
- 一种用于环境监测、环境应急处置和环境修复的工程机器人