测量隐患定位方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及电力系统技术领域,具体涉及一种测量隐患定位方法。
背景技术
远距离大容量的直流输电工程是重要的电力基础设施,是经济发展的重要基石。直流输电工程的安全稳定运行是电力系统可靠性的重要组成部分。在常规直流工程中,直流控制保护系统本身配置有冗余的分层分区的保护,用来在故障发生时尽快隔离清除故障,保护直流输电工程一次设备,尽可能地保证直流功率传输。
对于尚未引发保护动作的一次设备隐患,部分直流控制保护系统会通过越限检测或者幅值比较在系统监视功能中实现简单的异常检测。但是在实际直流工程中,测量值的小幅度偏差往往难以通过上述方法来判断。在直流控制系统作用下,单个测量值的偏差也可能引发相互耦合的其他测点出现偏离正常值的情况,这样的隐患排查往往需要大量的分析、仿真和排查。传统交流系统往往通过状态估计方法削弱电网中异常测点对方式计算的影响,并查找异常测点。随着直流输电的发展,也有很多研究致力于解决交直流混合电网的状态估计问题,但是其目的主要是为EMS系统提供数据,少有研究关注如何使用状态估计方法排查直流系统测量隐患。
发明内容
有鉴于此,为了解决现有技术中的上述问题,本发明提出一种测量隐患定位方法,首先构造量测方程利用状态估计算法对测量值进行估计,然后根据工程实际提示了方法的局限性和改进方法。
本发明通过以下技术手段解决上述问题:
一种测量隐患定位方法,包括如下步骤:
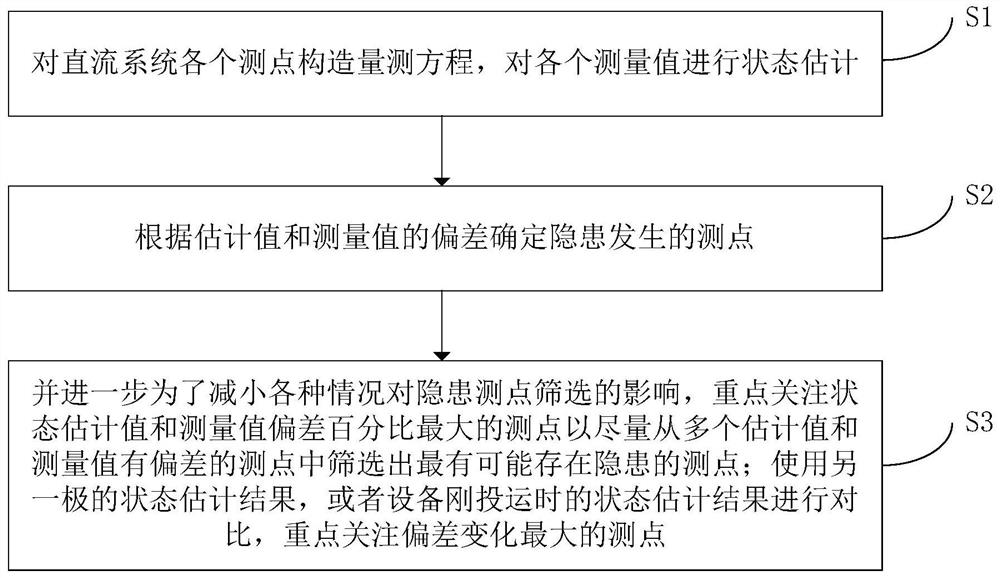
对直流系统各个测点构造量测方程,对各个测量值进行状态估计;
根据估计值和测量值的偏差确定隐患发生的测点;
并进一步为了减小各种情况对隐患测点筛选的影响,重点关注状态估计值和测量值偏差百分比最大的测点以尽量从多个估计值和测量值有偏差的测点中筛选出最有可能存在隐患的测点;使用另一极的状态估计结果,或者设备刚投运时的状态估计结果进行对比,重点关注偏差变化最大的测点。
优选地,对直流系统各个测点构造量测方程,对各个测量值进行状态估计,具体包括如下步骤:
在给定一般常规直流的运行方式、主接线、一次主设备和量测系统的条件下,其非线性量测方程可表达为:
z=f(x)+v (1)
其中z为量测矢量,x为状态估计矢量,f(x)是x的非线性矢量函数,v为残差矢量;对于一般常规特高压直流工程,z、x、f(x)、v可按(2)式选取:
(2)式中U
(3)式、(4)式中U
给定量测矢量后,求取状态估计矢量x使得目标函数最小;目标函数如下:
J(x)=[z-f(x)]
(5)式中,R
优选地,根据估计值和测量值的偏差确定隐患发生的测点具体包括如下步骤:
获得x矢量之后,选取量测值和状态估计值相差超出测量设备误差范围的测点即可判断该测点设备存在隐患;量测与状态估计偏差的计算可按(6)式进行:
(6)式中Δ
与现有技术相比,本发明的有益效果至少包括:
本发明对常规直流稳态运行工况进行状态估计,依据估计值和测量值的偏差来判断隐患发生的测点。根据状态估计特性,分析了该方法的局限性并给出了工程优化方法用以提高隐患判断的准确度。最后结合多个实际工程案例,验证了本发明所提方法的有效性。在物理在环仿真试验中,本发明所提的测量隐患定位方法给出了可能性最大的隐患测点位置。分析以及仿真试验表明本发明所提方法能够较为准确地定位直流系统测量隐患所在的测点,具有实用价值。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明测量隐患定位方法的流程图。
具体实施方式
为使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合附图和具体的实施例对本发明的技术方案进行详细说明。需要指出的是,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明提供一种测量隐患定位方法,包括如下步骤:
S1、常规直流稳态工况的状态估计
在给定一般常规直流的运行方式、主接线、一次主设备和量测系统的条件下,其非线性量测方程可表达为:
z=f(x)+v (1)
其中z为量测矢量,x为状态估计矢量,f(x)是x的非线性矢量函数,v为残差矢量。对于一般常规特高压直流工程,z、x、f(x)、v可按(2)式选取:
(2)式中U
(3)式、(4)式中U
给定量测矢量后,求取状态估计矢量x使得目标函数最小。目标函数如下:
J(x)=[z-f(x)]
(5)式中,R
S2、确定隐患发生的测点
获得x矢量之后,选取量测值和状态估计值相差超出测量设备误差范围的测点即可判断该测点设备存在隐患。量测与状态估计偏差的计算可按(6)式进行:
(6)式中Δ
S3、测量隐患定位方法的局限性与改进
由于本发明使用的状态估计算法对测量值进行估计的目标是残差的平方和最小,这样即使是一个测量值的误差往往也会引起多个估计值和测量值有偏差。另外由于本发明(2)式中换相电抗存在近似和简化,对于测点均正常的运行工况,也可能得出测量和估计值偏差超出测量误差范围的结果。为了减小上述情况对隐患测点筛选的影响,建议采取以下措施:
(1)重点关注状态估计值和测量值偏差百分比最大的测点以尽量从多个估计值和测量值有偏差的测点中筛选出最有可能存在隐患的测点。
(2)使用另一极的状态估计结果,或者设备刚投运时的状态估计结果进行对比,重点关注偏差变化最大的测点。
仿真与实际数据验证
使用带实际特高压直流控制保护硬件装置的物理在环实时仿真系统对所述测量隐患定位方法进行验证。
为验证测量隐患定位方法的有效性,本发明使用物理在环实时仿真系统作为基础,在极1直流线路电压(U
表1 U
表2 U
表1、表2的测点名和测量隐患定位方法一致。由表1可见U
本发明对常规直流稳态运行工况进行状态估计,依据估计值和测量值的偏差来判断隐患发生的测点。根据状态估计特性,分析了该方法的局限性并给出了工程优化方法用以提高隐患判断的准确度。最后结合多个实际工程案例,验证了本发明所提方法的有效性。在物理在环仿真试验中,本发明所提的测量隐患定位方法给出了可能性最大的隐患测点位置。分析以及仿真试验表明本发明所提方法能够较为准确地定位直流系统测量隐患所在的测点,具有实用价值。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 测量隐患定位方法
- 一种自动扶梯梯级与围裙板安全间隙测量与隐患定位系统及其方法