一种全方位智能清洗机器人
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及清洗设备技术领域,具体地,涉及一种全方位智能清洗机器人。
背景技术
油烟管道、中央空调管道、沟渠等区域的清洗空间小,清洗环境复杂,而且油污大,现在市场上已经专门开发出针对管道、沟渠进行清洗的清洗机器人。然而,现有技术中的管道清洗机器人一次性清洗的方位是固定的,或者一次性清洗的方位被限制在较窄区域,导致整个清洗机器人的清洗全面性较差,从而导致整体的清洗效率较低。
发明内容
针对现有技术的不足,本发明提供一种全方位智能清洗机器人。
本发明公开的一种全方位智能清洗机器人包括:
移动机构,其包括安装平台;
设于安装平台的塔台机构;塔台机构包括塔台驱动组件以及塔台主体;塔台主体转动连接于安装平台;塔台驱动组件的输出端与塔台主体的连接,其驱动塔台主体在XY平面内进行360度转动;以及
设于塔台主体的清洗机构;清洗机构包括清洗承载架、清洗组件以及清洗驱动组件;清洗承载架设于塔台主体;清洗组件转动连接于清洗承载架;清洗驱动组件输出端与清洗组件连接,其驱动清洗组件在XZ平面内进行180度转动。
根据本发明一实施方式,移动机构还包括主机架、移动组件、第一移动驱动组件以及第二移动移动组件;安装平台设于主机架;主机架设于移动组件;第一移动驱动组件以及第二移动移动组件分别设于主机架相对的两端,且第一移动驱动组件以及第二移动移动组件的输出端分别与移动组件连接。
根据本发明一实施方式,移动组件包括两个移动件;两个移动件分别安装于主机架相对的两侧;每一移动件包括第一驱动轮、第二驱动轮以及驱动履带;第一驱动轮以及第二驱动轮分别转动连接于主机架的侧壁,并分别靠近于主机架相对的两端;驱动履带分别套设于第一驱动轮以及第二驱动轮;第一移动驱动组件以及第二移动移动组件的输出端分别与第一驱动轮以及第二驱动轮连接。
根据本发明一实施方式,移动机构还包括第一视觉组件;第一视觉组件包括第一视觉件以及第一照明件;第一视觉件以及第一照明件分别设于主机架,第一视觉件位于第一照明件的一侧。
根据本发明一实施方式,移动机构还包括两个防护组件;两个两个防护组件分别设于主机架相对的两侧;防护组件的一端设于主机架,防护组件的另一端延伸至移动件的外侧。
根据本发明一实施方式,塔台驱动组件包括塔台驱动件、伞齿传动件以及齿盘件;塔台驱动件设于安装平台,塔台驱动件的输出端与伞齿传动件的连接,伞齿传动件与齿盘件啮合;齿盘件与塔台主体连接。
根据本发明一实施方式,塔台机构还包括进水管道组件;进水管道组件透过齿盘件与清洗组件连通。
根据本发明一实施方式,清洗承载架包括两个清洗承载板以及两个转动轴;两个清洗承载板间隔设置在塔台主体上;两个转动轴分别设于两个清洗承载板相对的一面;清洗组件位于两个清洗承载板之间,且清洗组件相对的两侧分别通过两个转动轴转动连接于两个清洗承载板;清洗驱动组件设于清洗组件,清洗驱动组件的输出端与转动轴连接。
根据本发明一实施方式,清洗组件包括清洗主体、内部管道件、喷出清洗件以及转动连通件;清洗主体相对的两侧分别通过两个转动轴转动连接于两个清洗承载板;清洗驱动组件设于清洗主体;内部管道件设于清洗主体内,喷出清洗件设于清洗主体的外壁,并与内部管道件的一端连通,内部管道件的另一端通过转动连通件与塔台机构的进水管道组件连通。
根据本发明一实施方式,清洗机构还包括位于喷出清洗件一侧的第二视觉组件;第二视觉组件包括第二视觉件以及第二照明件;第二视觉件以及第二照明件分别设于清洗主体;第二视觉件位于第二照明件的一侧。
本申请的有益效果在于:通过塔台驱动组件驱动塔台主体在XY平面内进行360度转动,再配合清洗驱动组件驱动清洗组件在XZ平面内进行度180转动,增大了清洗组件可清洗区域,从提升了智能清洗机器人的清洗全面性以及清洗效率。
附图说明
此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
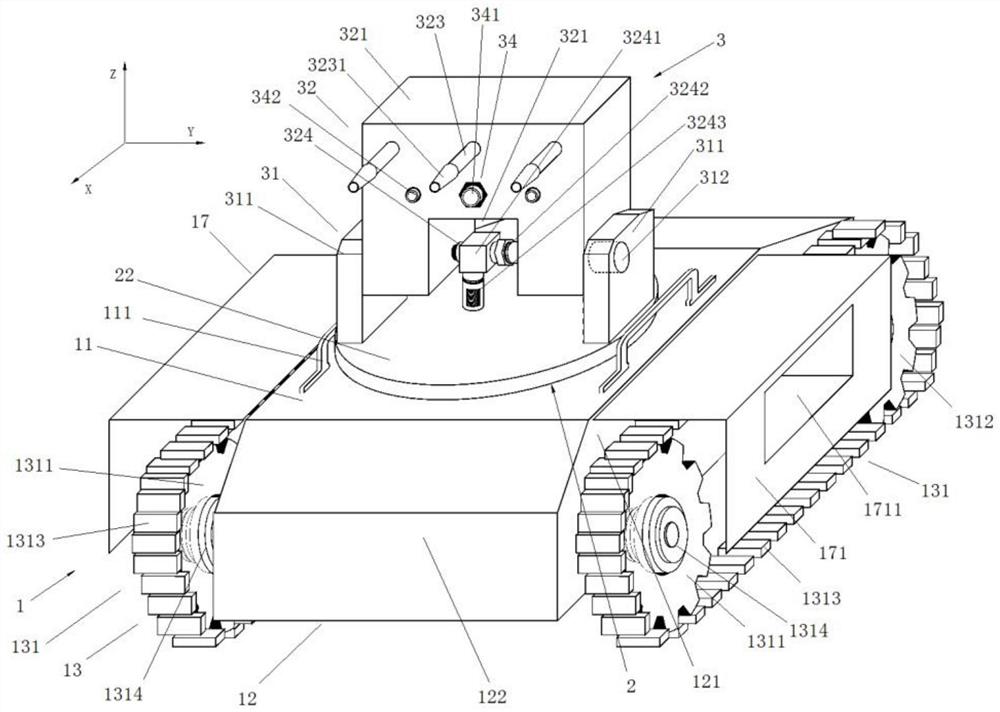
图1为本实施例中全方位智能清洗机器人的结构示意图;
图2为本实施例中全方位智能清洗机器人的爆炸示图。
具体实施方式
以下将以图式揭露本发明的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本发明。也就是说,在本发明的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
需要说明,本发明实施例中所有方向性指示诸如上、下、左、右、前、后……仅用于解释在某一特定姿态如附图所示下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本发明,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
参照图1和图2,图1为本实施例中全方位智能清洗机器人的结构示意图,图2为本实施例中全方位智能清洗机器人的爆炸示图。本实施例中的全方位智能清洗机器人包括移动机构1、塔台机构2以及清洗机构3。移动机构1包括安装平台11。塔台机构2设于安装平台11,塔台机构2包括塔台驱动组件21以及塔台主体22;塔台主体22转动连接于安装平台11;塔台驱动组件21的输出端与塔台主体22的连接,其驱动塔台主体22在XY平面内进行360度转动。清洗机构3设于塔台主体22,清洗机构3包括清洗承载架31、清洗组件32以及清洗驱动组件33;清洗承载架31设于塔台主体22;清洗组件32转动连接于清洗承载架31;清洗驱动组件33输出端与清洗组件32连接,其驱动清洗组件32在XZ平面内进行180度转动。
通过塔台驱动组件21驱动塔台主体22在XY平面内进行360度转动,再配合清洗驱动组件33驱动清洗组件32在XZ平面内进行180度转动,增大了清洗组件32可清洗区域,从提升了智能清洗机器人的清洗全面性以及清洗效率。
为便于理解,本实施例中引入了XYZ轴坐标系概念,将本实施例中全方位智能清洗机器人置于地面,人正对面向本实施例中全方位智能清洗机器人,垂直于人且平行于全方位智能清洗机器人的方向为X轴所在方向,定义平行于人且平行于全方位智能清洗机器人的方向为Y轴所在方向,平行于人且垂直于全方位智能清洗机器人的方向为Z轴所在方向。当塔台主体22在XY平面内进行360度转动,即带动了清洗组件32在XY平面内进行360度转动,而清洗组件32又可在XZ平面内进行180度转动,如此,就使得清洗组件32能够以自身为中心,在半球形的区域空间内进行清洗作业,一次性进行清洗的区域大,提升了智能清洗机器人的清洗全面性和清洗效率。
复参照图1和图2,进一步,移动机构1还包括主机架12、移动组件13、第一移动驱动组件14以及第二移动移动组件15。安装平台11设于主机架12,主机架12设于移动组件13。第一移动驱动组件14以及第二移动移动组件15分别设于主机架12相对的两端,且第一移动驱动组件14以及第二移动移动组件15的输出端分别与移动组件13连接。
通过第一移动驱动组件14以及第二移动移动组件15配合对移动组件13进行驱动,实现双驱动源驱动,在增强驱动力的同时,还能够使得移动组件13灵活进行前后方向移动的切换。
具体的,安装平台11为板状,主机架12包括机架主体121以及两个机头122。本实施例中的机架主体121为长方体状,其内部具有容纳空间。板状的安装平台11设于机架主体121的上表面,安装平台11与机架主体121一体成型。两个机头122分别设于机架主体121相对的两端,且两个机头122之间连线的长度大于移动组件13的长度,使得两个机头122能够在X轴所在方向对智能清洗机器人形成保护。优选的,机头122具有向下倾斜的斜面,机头122的表面具有防撞结构设计,例如,在机头122的表面设置防撞条,避免机头122撞击损坏。优选的,安装平台11的表面设置有两个相对的提手111,塔台机构2位于两个提手111之间,通过提手111的设置以便于提起智能清洗机器人。
复参照图1和图2,更进一步,移动组件13包括两个移动件131,两个移动件131分别安装于主机架12相对的两侧。每一移动件131包括第一驱动轮1311、第二驱动轮1312以及驱动履带1313。第一驱动轮1311以及第二驱动轮1312分别转动连接于主机架12的侧壁,并分别靠近于主机架12相对的两端。驱动履带1313分别套设于第一驱动轮1311以及第二驱动轮1312;第一移动驱动组件14以及第二移动移动组件15的输出端分别与第一驱动轮1311以及第二驱动轮1312连接。
通过第一移动驱动组件14以及第二移动移动组件15分别对移动件131的第一驱动轮1311以及第二驱动轮1312分别进行驱动,能够灵活的调整分别靠近于主机架12相对的两端的第一驱动轮1311以及第二驱动轮1312的转速,从灵活的实现智能清洗机器人的移动转向。
具体的,移动件131还包括两个转轮轴1314。第一驱动轮1311和第二驱动轮1312为履带轮,本实施例中的第一驱动轮1311和第二驱动轮1312分别通过转轮轴1314转动连接于机头122的侧壁上。第一驱动轮1311中心点和第二驱动轮1312中心点的连线与X轴平行,驱动履带1313沿着X轴方向设置,并分别适配套设在第一驱动轮1311和第二驱动轮1312上。机头122的内部具有容纳空间,该容空间与机架主体121的容纳空间连通。转轮轴1314垂直穿过机头122的侧壁上,转轮轴1314与机头122形成转动连接关系,两个转轮轴1314漏于机头122的一端分别与第一驱动轮1311以及第二驱动轮1312连接,两个转轮轴1314位于机头122容纳空间内的一端具有轴齿轮13141。第一移动驱动组件14包括第一移动驱动件141以及移动齿轮142。第一移动驱动件141为电机,其设置在机架主体121的容纳空间内,第一移动驱动件141的驱动轴与移动齿轮142连接,移动齿轮142与轴齿轮13141啮合。第一移动驱动件141驱动移动齿轮142转动,移动齿轮142带动轴齿轮13141以及转轮轴1314转动,转轮轴1314带动第一驱动轮1311转动,从而带动驱动履带1313转动。本实施例中的移动齿轮142和转轮轴1314为相适配的伞齿轮。第二移动移动组件15的结构以及作动原理与第一移动驱动组件14的结构以及作动原理一致,此处不再赘述。如此,当第一移动驱动组件14以及第二移动移动组件15同步同向对第一驱动轮1311以及第二驱动轮1312进行正反向驱动时,即可实现智能清洗机器人前后移动,需要智能清洗机器人变向时,只需要第一移动驱动组件14以及第二移动移动组件15配合对第一驱动轮1311以及第二驱动轮1312分别进行同向不同转速的驱动即可,此处不再赘述。
复参照图1和图2,更进一步,移动机构1还包括第一视觉组件16。第一视觉组件16包括第一视觉件161以及第一照明件162;第一视觉件161以及第一照明件162分别设于主机架12,第一视觉件161位于第一照明件162的一侧。优选的,第一照明件162的数量为两个,第一视觉件161位于两个第一照明件162之间。通过第一视觉件161进行摄像录像,实现对智能清洗机器人清洗环境的感知和对清洗过程过程的记录,以便于智能清洗机器人按照正确清洗线路进行行走,也便于对清洗过的油烟管道或沟渠进行清洗效果的查验。第一照明件162为提供第一视觉件161的照明,以保证第一视觉件161摄像录像的质量。第一视觉件161和两个第一照明件162的顺次连线与Y轴平行。具体的,第一视觉件161和第一照明件162均沿着X方向设置在主机架12的其中一机头122上。第一视觉件161为摄像头,其能够进行摄像录像,第一照明件162为LED灯管,其能够发出扇形光,以提供照明。
复参照图1和图2,更进一步,移动机构1还包括两个防护组件17。两个两个防护组件17分别设于主机架12相对的两侧;防护组件17的一端设于主机架12,防护组件17的另一端延伸至移动件131的外侧。通过两个防护组件17对智能清洗机器人主机架12相对两侧的移动件131进行防护,避免移动件131的受损。具体的,防护组件17包括L型防护件171。L型防护件171为L型的板状,L型防护件171的长度与机架主体121的长度一致,L型防护件171的一端与机架主体121连接,其另一端位于驱动履带1313的外侧。优选的,L型防护件171位于驱动履带1313外侧的一端开设有移动槽1711,通过移动槽1711的设置,以便于手动移动智能清洗机器人时作用力的施加。
复参照图1和图2,更进一步,塔台驱动组件21包括塔台驱动件211、伞齿传动件212以及齿盘件213。塔台驱动件211设于安装平台11,塔台驱动件211的输出端与伞齿传动件212的连接,伞齿传动件212与齿盘件213啮合;齿盘件213与塔台主体22连接。
通过塔台驱动件211、伞齿传动件212以及齿盘件213的配合,流畅且稳定的实现塔台主体22的360的旋转。具体的,塔台驱动件211安装于机架主体121的容纳空间内,本实施例中的塔台驱动件211为电机。伞齿传动件212为伞齿与齿轴的配合,塔台驱动件211的输出轴与伞齿传动件212的齿轴同轴连接。齿盘件213为齿盘,其沿着自身的周圆方向设置有多个啮合齿2131,多个啮合齿2131沿着圆周方向依次等间距排列。齿盘件213的中心开设有通孔2132。齿盘件213沿着平行于XY平面的方向设置,齿盘件213位于机架主体121的容纳空间内,伞齿传动件212与齿盘件213的啮合齿2131啮合。塔台主体22为圆盘状,其沿着平行于XY平面的方向设置,且塔台主体22转动连接于安装平台11的表面,并通过同步轴(图中未显示)与齿盘件213连接。塔台驱动件211驱动伞齿传动件212转动,伞齿传动件212带动齿盘件213转动,齿盘件213带动塔台主体22在XY平面内进行360度的旋转。
优选的,塔台机构2还包括进水管道组件23。进水管道组件23透过齿盘件213与清洗组件32连通。通过进水管道组件23实现清洗用水的自动进入。具体的,进水管道组件23为进水管道,其一端与外界的自动供水水源连接,例如水泵,进水管道组件23的另一端穿过机头122后并继续向着121的容纳空间延伸,直至延伸至齿盘件213的通孔2132的正下方。清洗组件32的入水端穿过塔台主体22以及齿盘件213后与进水管道组件23连通。
将进水管道23透过齿盘件213与清洗组件32连通,使得进水管道23能够从旋转塔台机构2内部引流至清洗组件32,避免了从外部进水而导致管路混乱、对清洗组件32的旋转造成干扰;而且进水管道23透过齿盘件213也不会影响塔台主体22的360度的旋转,保证了塔台主体22的360度旋动作不被影响。
优选的,塔台机构2还包括转角检测组件24。转角检测组件24嵌设于主机架12的机架主体121的容纳空间内,转角检测组件24的检测端面向齿盘件213。转角检测组件24用于对齿盘件213的转动角度进行检测,以便于确认塔台主体22在XY平面内的旋转方位,从而更好的控制清洗组件32在XY平面内的旋转方位以用来清洗。本实施例中的转角检测组件24可采用现有的检测转动角度的传感器或仪器,此处不再赘述。
复参照图1和图2,更进一步,清洗承载架31包括两个清洗承载板311以及两个转动轴312;两个清洗承载板311间隔设置在塔台主体22上;两个转动轴312分别设于两个清洗承载板311相对的一面;清洗组件32位于两个清洗承载板311之间,且清洗组件32相对的两侧分别通过两个转动轴312转动连接于两个清洗承载板311;清洗驱动组件33设于清洗组件32,清洗驱动组件33的输出端与转动轴312连接。
通过清洗承载板311和转动轴312的配合,使得清洗驱动组件33能够稳定驱动清洗组件32在XZ平面内进行180度的转动。具体的,两个清洗承载板311均沿着X方向垂直安装于塔台主体22的表面上,两个清洗承载板311正对。转动轴312沿着Y轴方向设置,其一端垂直于清洗承载板311上,转动轴312与清洗承载板311转动连接。转动轴312另一端穿过清洗组件32外侧壁后,并延伸至清洗组件32内部。转动轴312与清洗组件32的外侧壁固定连接。清洗驱动组件33位于清洗组件32内,其输出端与转动轴312位于清洗组件32内部的一端连接。清洗驱动组件33驱动转动轴312转动,从而带动清洗组件32在XZ平面内进行180度的转动。
复参照图1和图2,更进一步,清洗组件32包括清洗主体321、内部管道件322、喷出清洗件323以及转动连通件324。清洗主体321相对的两侧分别通过两个转动轴312转动连接于两个清洗承载板311;清洗驱动组件33设于清洗主体321;内部管道件322设于清洗主体321内,喷出清洗件323设于清洗主体321的外壁,并与内部管道件322的一端连通,内部管道件322的另一端通过转动连通件324与塔台机构2的进水管道组件23连通。
通过内部管道件322的设置,使得清洗用水在清洗组件32的内部进行流动,避免了管道外漏对清洗主体321的转动造成干扰,而且还能够对流水管道形成保护。而通过转动连通件324的设置,保证了内部管道件322和进水管道组件23之间的转动连通状态,保证清洗组件32在XY平面进行360度和在XZ平面进行180度旋转时,进水管道组件23、转动连通件324以及内部管道件322依然保持流畅的连通状态,保证清洗工作的流畅进行。具体的,清洗主体321为立方壳体,其内部具有容纳空间。清洗主体321下端开设有连通件承载位3211。本实施例中的连通件承载位3211为U型缺口,连通件承载位3211的开口端与清洗主体321的下端连通,并面向塔台主体22。内部管道件322布设于清洗主体321内部的容纳空间内。喷出清洗件323为喷水管,其沿着X方向垂直在于清洗主体321的侧壁,并与清洗主体321内部的内部管道件322连通。优选的,喷出清洗件323的末端具有喷头3231,喷头3231的出水口的直径小于喷出清洗件323的内径,如此,通过喷头3231的设置以增强喷水水流的强度。优选的,喷出清洗件323的数量为三个,三个喷出清洗件323沿着Y轴方向依次间隔排列于清洗主体321的侧壁上。优选的,相邻两个喷出清洗件323之间的间隔相同。
优选的,转动连通件324包括转动连通主体3241、第一转动连通管3242以及第二转动连通管3243。转动连通主体3241位于连通件承载位3211内。第一转动连通管3242的一端连通于转动连通主体3241,第一转动连通管3242的另一端穿过清洗主体321后与内部管道件322连通。第二转动连通管3243的一端通于转动连通主体3241,其另一端穿过向塔台主体22、安装平台11、机架主体121以及齿盘件213的通孔2132后与进水管道组件23连通。第一转动连通管3242与第二转动连通管3243的延长线垂直。本实施例中的第一转动连通管3242以及第二转动连通管3243均可采用现有的可转动连通管道,此处不再赘述。
复参照图1和图2,更进一步,清洗机构3还包括位于喷出清洗件323一侧的第二视觉组件34。第二视觉组件34包括第二视觉件341以及第二照明件342;第二视觉件341以及第二照明件342分别设于清洗主体321;第二视觉件341位于第二照明件342的一侧。优选的,第二照明件342的数量为两个,第二视觉件341位于两个第二照明件342之间。通过第二视觉件341可从另外一个角度对智能清洗机器人清洗环境的感知和对清洗过程过程的记录,以便于智能清洗机器人按照正确清洗线路进行行走,也便于对清洗过的油烟管道或沟渠进行清洗效果的查验。而且,因为第二视觉件341是设置可在XZ平面内180度内转动的清洗主体321上,如此,就使得第二视觉件341的摄像录像范围是活动的,且范围更为宽广,再与固定设置的第一视觉件161相互结合,能够实现智能清洗机器人清洗路线上全方位环境的视觉记录,确保了清洗效果的查验的正确性和完全性。两个第二照明件342为第二视觉件341提供摄像录像照明,以保证第二视觉件341摄像录像的质量。第二视觉件341位于喷出清洗件323的下方,两个第二照明件342分别位于第二视觉件341相对的两侧。第二视觉件341以及两个第二照明件342的顺次连线于Y轴平行。本实施例中的第二视觉件341以及第二照明件342的结构以及原理与第一视觉件161以及第一照明件162的结构以及原理一致,此处不再赘述。
综上:本实施例中全方位智能清洗机器人的清洗组件能够在XY平面内进行360度转动,并能够同时在XZ平面内进行180度转动,提升了清洗区域的全面性和清洗效率。而且整个流通水的进水管道组件、转动连通件以及内部管道件均是在内部设置,无外露管道,避免了流水管道的混乱和损坏。而且,通过第一视觉件和第二视觉件的配合能够实现清洗过程的录像传送,从而对清洗过程的监控,以便清洗调整,并能够在后期对清洗效果进行评估。
上仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理的内所作的任何修改、等同替换、改进等,均应包括在本发明的权利要求范围之内。
- 一种全方位智能清洗机器人
- 一种全方位清洁的油罐清洗机器人