一种温室内自动清洁养殖装置
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及一种养殖装置,尤其涉及一种温室内自动清洁养殖装置。
背景技术
在进行室内养殖时,通常是在地面上进行养殖,直接抛洒饲料在养殖场内,如此会使残余的饲料、飞溅出来的水和排泄物均堆积在一起,为了不影响养殖物的正常生产,在堆积过多后需要对其进行清理,在对其进行清理时,需先将养殖物弄出,使其不再养殖场,随后才能进行清除废料的工作,但是此类方法较为繁琐,在运输养殖物时易对其造成伤害。
因此需要设计出一种便于将进行养殖工作时产生的废料进行清除,不对养殖物造成伤害的温室内自动清洁养殖装置。
发明内容
为了克服人工清理废料时步骤较为繁琐,在运输养殖物时易对其造成伤害的缺点,技术问题为:提供一种便于将进行养殖工作时产生的废料进行清除,不对养殖物造成伤害的温室内自动清洁养殖装置。
技术方案是:一种温室内自动清洁养殖装置,包括有:
底座,底座顶部设有安装机构;
放置机构,安装机构上设有放置机构;
刮除机构,安装机构上设有刮除机构。
进一步,安装机构包括有:
安装台,底座顶部两侧均设有安装台;
第一安装柱,安装台顶部两侧均设有第一安装柱;
安装板,第一安装柱两侧之间均连接有安装板,安装板两侧均开有滑槽;
盖板,安装柱顶部之间连接有盖板。
进一步,放置机构包括有:
第二安装柱,安装板顶部两侧均设有第二安装柱;
第一滑轨,第二安装柱内端均设有第一滑轨;
滑块,第一滑轨内均滑动式设有滑块;
放置框,两侧的滑块之间均连接有放置框,放置框内均设有漏网;
第一把手,放置框一侧均设有第一把手。
进一步,刮除机构包括有:
第一导轨,滑槽内均设有第一导轨,两侧的第一导轨一侧之间滑动式连接有刮板;
第一弹簧,刮板一侧的两侧与第一导轨之间均连接有第一弹簧;
第三安装柱,放置框一侧的两侧均设有第三安装柱;
导向杆,第三安装柱一侧均设有导向杆,导向杆底部均设有楔形块。
进一步,还包括有收集机构,收集机构包括有:
第二滑轨,安装台顶部内侧均设有第二滑轨;
收集框,第二滑轨之间滑动式连接有收集框,收集框一侧设有第二把手;
卡扣,收集框顶部一侧的两侧均设有卡扣;
异形杆,卡扣顶部均设有异形杆;
推板,一侧放置框一侧的两侧均设有推板。
进一步,还包括有遮挡机构,遮挡机构包括有:
第二导轨,安装台外侧均设有第二导轨;
挡板,第二导轨上均滑动式设有挡板;
第二弹簧,挡板一侧与第二导轨之间均连接有第二弹簧;
顶杆,挡板一侧下部均设有顶杆。
进一步,还包括有驱动机构,驱动机构包括有:
气缸,盖板顶部设有气缸;
第一连接杆,气缸伸缩杆上连接有第一连接杆;
第二连接杆,第一连接杆底部设有第二连接杆;
连接块,第二连接杆一侧的两端均设有连接块,两侧的连接块与第一把手均相互连接。
进一步,还包括有推平机构,推平机构包括有:
第四导轨,一侧安装板底部两侧均设有第四导轨;
导向块,第四导轨一侧均滑动式设有导向块;
第三弹簧,导向块一侧与第四导轨之间均连接有第三弹簧;
转杆,导向块之间转动式连接有转杆;
转板,转杆中部设有转板;
第四弹簧,转板两侧与导向块之间均连接有第四弹簧。
本发明达到了的效果:通过设置的安装机构和放置机构可实现对养殖物和进行养殖工作时产生的废料进行分隔,从而不影响养殖物的正常生长;通过设置的刮除机构工作人员拉动第一把手进行移动即可将废料刮除,操作简单;通过设置的驱动机构工作人员只需控制气缸工作即可使第一把手移动,进一步节省人力;通过设置的遮挡机构在平时可遮挡强光,在移动时可便于进行通风工作,去除异味。
附图说明
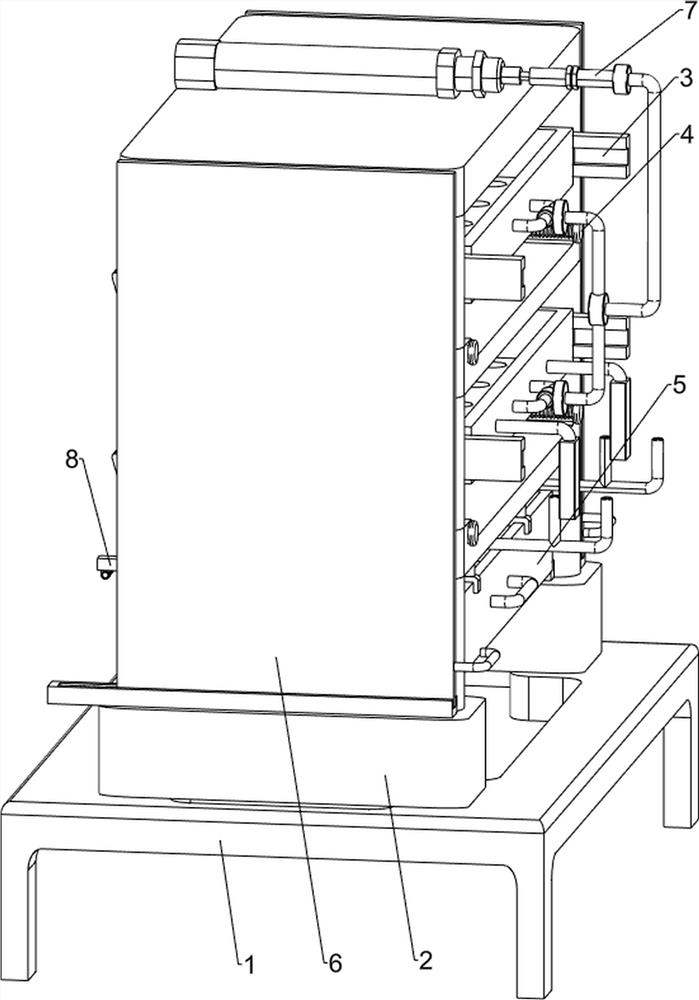
图1为本发明的立体结构示意图。
图2为本发明安装机构的立体结构示意图。
图3为本发明放置机构的立体结构示意图。
图4为本发明刮除机构的立体结构示意图。
图5为本发明收集机构的立体结构示意图。
图6为本发明遮挡机构的立体结构示意图。
图7为本发明驱动机构的立体结构示意图。
图8为本发明推平机构的立体结构示意图。
图中零部件名称及序号:1_底座,2_安装机构,21_安装台,22_第一安装柱,23_安装板,24_滑槽,25_盖板,3_放置机构,31_第二安装柱,32_第一滑轨,33_放置框,34_漏网,35_第一把手,36_滑块,4_刮除机构,41_第一导轨,42_第一弹簧,43_刮板,44_第三安装柱,45_导向杆,47_楔形块,5_收集机构,51_第二滑轨,52_收集框,53_第二把手,54_卡扣,55_异形杆,56_推板,6_遮挡机构,61_第二导轨,62_挡板,63_第二弹簧,64_顶杆,7_驱动机构,71_气缸,72_第一连接杆,73_第二连接杆,74_连接块,8_推平机构,81_第四导轨,82_导向块,83_第三弹簧,84_转杆,85_转板,86_第四弹簧。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
实施例1
一种温室内自动清洁养殖装置,如图1所示,包括有底座1、安装机构2、放置机构3和刮除机构4,底座1顶部设有安装机构2,安装机构2上设有放置机构3,安装机构2上设有刮除机构4。
如图2所示,安装机构2包括有安装台21、第一安装柱22、安装板23和盖板25,底座1顶部左右两侧均设有安装台21,安装台21顶部前后两侧均设有第一安装柱22,第一安装柱22上下两侧之间均连接有安装板23,安装板23左右两侧均开有滑槽24,安装柱顶部之间连接有盖板25。
如图3所示,放置机构3包括有第二安装柱31、第一滑轨32、放置框33、漏网34、第一把手35和滑块36,安装板23顶部左右两侧均设有第二安装柱31,第二安装柱31内端均设有第一滑轨32,第一滑轨32内均滑动式设有滑块36,上下两侧的滑块36之间均连接有放置框33,放置框33内均设有漏网34,放置框33前侧均设有第一把手35。
当需要进行温室内养殖时,工作人员可将桑蚕等养殖物放在放置框33内进行养殖,排泄物、残余的饲料和多余的水等经过漏网34落在安装板23上,当需要对安装板23上的废料进行清理时,工作人员可先在底座1前侧放置废料框,随后通过第一把手35拉动放置框33向前移动,放置框33向前移动带动第三安装柱44、导向杆45和楔形块47向前移动,楔形块47向前移动带动刮板43向前移动,第一弹簧42被压缩,刮板43向前移动即可将安装板23上的废料进行刮除,将其刮落在废料框内,当安装板23上的废料全部刮除后,松开第一把手35,在第一弹簧42的作用下刮板43向后移动复位,刮板43向后移动带动楔形块47向后移动,从而第三安装柱44、导向杆45、放置框33和第一把手35向后移动复位,如还需清除废料时,重复上述操作即可。
实施例2
在实施例1的基础之上,如图4所示,刮除机构4包括有第一导轨41、第一弹簧42、刮板43、第三安装柱44、导向杆45和楔形块47,滑槽24内均设有第一导轨41,上下两侧的第一导轨41后侧之间滑动式连接有刮板43,刮板43前侧的左右两侧与第一导轨41之间均连接有第一弹簧42,放置框33后侧的左右两侧均设有第三安装柱44,第三安装柱44后侧均设有导向杆45,导向杆45底部均设有楔形块47。
如图5所示,还包括有收集机构5,收集机构5包括有第二滑轨51、收集框52、第二把手53、卡扣54、异形杆55和推板56,安装台21顶部内侧均设有第二滑轨51,第二滑轨51之间滑动式连接有收集框52,收集框52前侧设有第二把手53,收集框52顶部前侧的左右两侧均设有卡扣54,卡扣54顶部均设有异形杆55,下侧放置框33前侧的左右两侧均设有推板56。
如图6所示,还包括有遮挡机构6,遮挡机构6包括有第二导轨61、挡板62、第二弹簧63和顶杆64,安装台21外侧均设有第二导轨61,第二导轨61上均滑动式设有挡板62,挡板62后侧与第二导轨61之间均连接有第二弹簧63,挡板62前侧下部均设有顶杆64。
如图7所示,还包括有驱动机构7,驱动机构7包括有气缸71、第一连接杆72、第二连接杆73和连接块74,盖板25顶部设有气缸71,气缸71伸缩杆上连接有第一连接杆72,第一连接杆72底部设有第二连接杆73,第二连接杆73后侧的上下两端均设有连接块74,上下两侧的连接块74与第一把手35均相互连接。
如图8所示,还包括有推平机构8,推平机构8包括有第四导轨81、导向块82、第三弹簧83、转杆84、转板85和第四弹簧86,下侧安装板23底部左右两侧均设有第四导轨81,第四导轨81后侧均滑动式设有导向块82,导向块82前侧与第四导轨81之间均连接有第三弹簧83,导向块82之间转动式连接有转杆84,转杆84中部设有转板85,转板85左右两侧与导向块82之间均连接有第四弹簧86。
挡板62可挡住强光直接照射放置框33,需清除废料时,工作人员可启动气缸71工作,气缸71伸缩杆伸长带动第一连接杆72、第二连接杆73和连接块74向前移动,连接块74向前移动带动第一把手35向前移动,以此便可无需人工拉动第一把手35向前移动,放置框33向前移动带动推板56向前移动,当推板56向前移动至与异形杆55前侧接触后继续移动,此时废料还未开始下落,推板56向前移动带动异形杆55、卡扣54、收集框52和第二把手53向前移动,随后废料开始下落从而掉落在收集框52内,收集框52向前移动至与顶杆64接触后继续移动,从而带动顶杆64向前移动,顶杆64向前移动带动挡板62向前移动,第二弹簧63被拉伸,挡板62向前移动即可不再遮挡住放置框33,气流便可通过,以此进行通风,吹走异味,当安装板23上的废料全部刮除,便可通过气缸71使第一连接杆72、第二连接杆73和连接块74向后移动,从而放置框33向后移动复位,放置框33向后移动带动推板56向后移动,当推板56向后移动至与异形杆55中部接触后继续移动,从而带动异形杆55、卡扣54、收集框52和第二把手53向后移动,在第二弹簧63的作用下挡板62和顶杆64向后移动复位,再次对放置框33进行遮挡,工作人员可向前推动转杆84,从而导向块82向前移动,第三弹簧83被压缩,转杆84向前移动带动转板85向前移动,当转板85向前移动至与收集框52后侧接触后继续移动,从而转板85转动,第四弹簧86被压缩,当不与收集框52后侧接触后,在第四弹簧86的作用下转板85转动复位,继续移动转杆84以此便可将收集框52内的废料刮平,便于多装废料,随后便可松开转杆84,在第三弹簧83的作用下导向块82、转杆84和转板85向后移动复位,当转板85向后移动至与收集框52后侧接触后继续移动,从而转板85转动,第四弹簧86被压缩,当不与收集框52后侧接触后,在第四弹簧86的作用下转板85转动复位,以此工作人员只需间隔的进行上述步骤即可,当需要对收集框52内的废料进行清理时,在某次时收集框52向前移动后,便可对废料进行清理,不再需要对安装板23上的废料进行清理后,停止气缸71工作。
以上结合具体实施例描述了本发明实施例的技术原理。这些描述只是为了解释本发明实施例的原理,而不能以任何方式解释为对本发明实施例保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明实施例的其它具体实施方式,这些方式都将落入本发明实施例的保护范围之内。
- 一种温室内自动清洁养殖装置
- 一种肉鸡养殖室内卫生清洁装置