一种基于滑模控制的直流微电网改进自适应下垂控制策略
文献发布时间:2023-06-19 10:48:02
技术领域
一种基于滑模控制的直流微电网的改进自适应下垂控制策略,属于DC-DC变换器控制领域。
背景技术
针对传统下垂控制在直流配电网发生扰动或故障时,由于系统的非线性和固定下垂系数导致直流配电网在暂态时电压下稳定性差。传统下垂控制存在的不足:下垂系数是由换流站容量确定的定值,当系统发生扰动时,直流配电网各换流站根据原有下垂系数调节有功输出,这就会使功率裕度较小的换流站容易满载或过载运行,降低系统稳定性。
对传统的下垂控制进行改进可以更好地提高系统的稳定性。因此提出了一种自适应改进下垂控制策略,本发明包括使用滑模控制同时控制每个变换器的输出电压和输入电流,通过其中一个自适应PI控制器调整下垂系数,以消除微电网中各单元的均流误差;另一个自适应PI控制器专门用于二次控制回路,通过改变下垂线来调节微电网的直流母线电压的控制策略。本发明解决了传统下垂控制在直流微电网的系统参数或负载变化较大时,由于系统的非线性和固定下垂系数导致现有控制方法控制性能不佳输出响应慢的问题。
发明内容
为了解决上述存在的技术问题,本发明提出了一种基于滑模控制的直流微电网的改进自适应下垂控制策略,其特征在于:包括如下步骤:
步骤1、建立滑模控制的状态空间模型及滑模控制方程;
步骤2、建立自适应PI控制器模型,其中一个PI控制器通过根据瞬时误差连续调整比例和积分增益调整下垂系数来克服系统参数和加载条件的变化;另一个自适应PI控制器专门用于二次控制回路,通过改变下垂线来调节微电网的直流母线电压;
步骤3、所述滑模控制和PI控制器共同构成直流微电网自适应下垂控制系统。
进一步的,所述DC-DC升压变换器数学模型为:
式中,v
进一步的,步骤1具体包括:
步骤1.1所述状态空间模型为:
X
X
式中,V
步骤1.2、选取滑模面为:S=C
式中C
运用滞环特性允许晓得误差信号,因此滑模控制方程为:
式中,k为允许误差。
进一步的,所述滑模控制器的存在条件为:
经简化,存在条件可表示为:
进一步的,下垂技术用于根据下式设置DC-DC变换器的电压基准,以确保每个变换器根据其额定值分担功率。
v
式中v
进一步的,所述自适应PI控制器模型可表示为:
式中,K
式中,α
进一步的,所述滑模控制和PI控制器构成直流微电网自适应下垂控制系统,自适应下垂系统可描述为:
v
式中,e
将第i个变换器的电流期望值
式中i
r
式中,
本发明与现有技术相比,具有如下有益效果,本发明稳态运行情况下,稳定性好,误差小;一个PI控制器通过根据瞬时误差连续调整比例和积分增益调整下垂系数来克服系统参数和加载条件的变化;另一个自适应PI控制器专门用于二次控制回路,通过改变下垂线来调节微电网的直流母线电压。本发明解决了传统下垂控制在直流微电网的系统参数或负载变化较大时,由于系统的非线性和固定下垂系数导致现有控制方法控制性能不佳、输出响应慢的问题。
附图说明
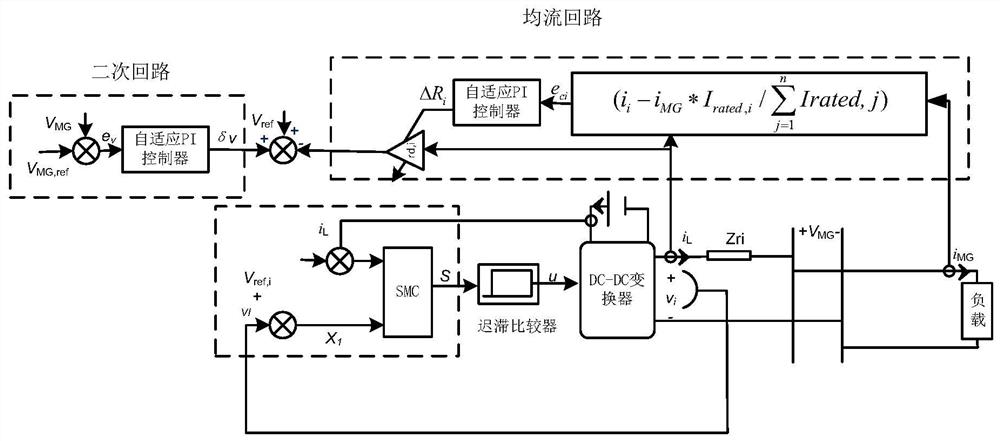
图1是本发明提出的直流微电网自适应控制系统控制框图;
图2是DC-DC升压变换器等效电路图;
图3是本发明提出的自适应PI控制器框图;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施实例仅仅是本发明一部分实施实例,而不是全部的实施例。基于本发明中的实施实例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施实例,都属于本发明保护的范围。
如附图1所示,为本实施例的DC-DC升压变换器的拓扑结构;
本实例的基于滑模控制的直流微电网的改进自适应下垂控制策略,如附图2所示,其特征在于:包括如下步骤:
步骤1、建立滑模控制的状态空间模型及滑模控制方程;
步骤1.1所述状态空间模型为:
X
X
式中,V
步骤1.2、选取滑模面为:S=C
式中,C
运用滞环特性允许晓得误差信号,因此滑模控制方程为:
式中,k为允许误差。
步骤1.3、滑模控制器的存在条件为:
经简化,存在条件可表示为:
步骤1.4、下垂技术用于根据下式设置DC-DC变换器的电压基准,以确保每个变换器根据其额定值分担功率。
v
式中v
步骤2、建立自适应PI控制器模型,如附图3所示,其中一个PI控制器通过根据瞬时误差连续调整比例和积分增益调整下垂系数来克服系统参数和加载条件的变化;另一个自适应PI控制器专门用于二次控制回路,通过改变下垂线来调节微电网的直流母线电压。
所述自适应PI控制器模型可表示为:
式中,K
式中,α
步骤3、由滑模控制和PI控制器构成直流微电网自适应下垂控制系统,自适应下垂系统可描述为:
v
式中,e
将第i个变换器的电流期望值
式中i
v
式中,
本发明的实施例的上述描述是为了示例和说明的目的而给出的。它们并不是穷举性,也不意于将本发明限制于这些精确描述的内容,在上述教导的指引下,还可以有许多改动和变化。这些实施例被选中和描述仅是为了最好解释本发明的原理以及它们的实际应用,从而使得本领域技术人员能够更好地在各种实施例中并且使用适合于预期的特定使用的各种改动来应用本发明。因此,应当理解的是,本发明意欲覆盖在下面权利要求范围内的所有改动和等同。
- 一种基于滑模控制的直流微电网改进自适应下垂控制策略
- 基于改进自适应下垂控制的孤岛交直流混联微电网潮流计算方法