一种用于检测零件内部多异物的全自动柔性系统
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及一种检测异物的柔性系统,具体地涉及一种用于检测零件内部多异物的全自动柔性系统。
背景技术
本技术应用于汽车零配件行业油泵内部异物的检测,针对油泵泵体在环线装配过程中,每个站位都会对泵体装配的合格性进行检测,合格件流入下一道工序,不合格件流入不良品通道,质量会对不良件是否可回用进行定义,装配好的不良件被定义为可回用件时,就需对回用件拆分,拆分后再上线装配,存在叶片藏于壳体内的风险,导致壳体再次上线组装成品多叶片,严重的会导致泵体卡滞报废。
现有装配线上,特别是叶片泵的装配,不良件通过人工拆分、分拣、目检后,对回用件进行上线再装配。通过人工目视检泵体内是否存在异物(此技术异物主要涉及叶片),一方面人工目视检是不可靠的,有可能出现疏漏,使得多叶片的泵体流入装配线,存在很大的安全隐患;另一方面,人工目视检测,效率低下。
发明内容
本发明的目的是针对现有技术存在的不足,提供一种取代人工目视检测,安全可靠,有效避免安全事故的发生的用于检测零件内部多异物的全自动柔性系统。
为实现上述目的,本发明提供了一种用于检测零件内部多异物的全自动柔性系统,包括柔性传送机构,所述柔性传输机构包括柔性传送带和型材固定架,所述型材固定架上依次设置有上料机构、检测机构和下料机构,所述上料机构包括托盘、扫码枪、上料RFID阅读器、上料传感器和上料挡停块,所述下料机构包括下料RFID阅读器、下料传感器和下料挡停块,所述托盘设置在柔性传送带上,所述托盘上设置有定位仪,所述扫码枪通过支架设于托盘的上方,所述检测机构包括光谱共焦传感器、顶升机构、检测挡停块、检测RFID阅读器和检测传感器,所述顶升机构通过支架固接在型材固定架上,所述光谱共焦传感器与机械手相连,所述机械手固定在机器人基座上。
作为上述方案的进一步地改进,所述托盘上设置有与上料RFID阅读器、检测RFID阅读器和下料RFID阅读器相感应的磁码,所述上料RFID阅读器、检测RFID阅读器和下料RFID阅读器均通过支架固定在型材固定架上。
作为上述方案的进一步地改进,所述型材固定架在与上料机构相对的侧边设置有触摸屏,所述触摸屏配置有状态指示灯。
作为上述方案的进一步地改进,所述上料机构上还设置有带有指示灯的启动按钮和急停按钮,所述启动按钮通过支架固接在型材固定架上,所述急停按钮通过连接板与型材固定架相连。
作为上述方案的进一步地改进,所述上料传感器、下料传感器和检测传感器均通过支架固定在型材固定架上,所述机器人基座与机器人控制柜相连,所述机器人控制柜置于型材固定架下方。
作为上述方案的进一步地改进,所述上料挡停块、下料挡停块和检测挡停块均设置在型材固定架上且通过气管与气缸相连,所述气缸与电控箱相连。
作为上述方案的进一步地改进,所述检测机构外设置有防护罩,所述防护罩上设置有安全门锁,所述防护罩顶部设置有照明灯。
作为上述方案的进一步地改进,所述防护罩外壁上设置有电脑显示屏,所述电脑显示屏与主机相连,所述防护罩外设置有电控箱,所述电控箱置于电脑显示屏下方。
作为上述方案的进一步地改进,所述下料机构设有下料口,所述下料口由合格件出料口和废品出料口组成。
本发明的有益效果为:这种用于检测零件内部多异物的全自动柔性系统探测泵体内部是否存在异物,取代人工目视检测,安全可靠,有效避免安全事故的发生;采用RFID技术进行信息识别、匹配,环境适应能力强,对工作环境要求低,可快速响应;采用光谱共焦位移传感器,不受光晕及环境干扰影响,检测精度高;不同项目配置有不同的托盘,实现不通项目的精确定位,不同项目通过RFID技术调用不同的程序,可兼容多个项目的检测,通用性强;此零件内部多异物自动检测系统,自动化程度高,使用方便,便于维护,有效提高检测效率。
附图说明
图1是本发明实施例提供的一种用于检测零件内部多异物的全自动柔性系统的主视图;
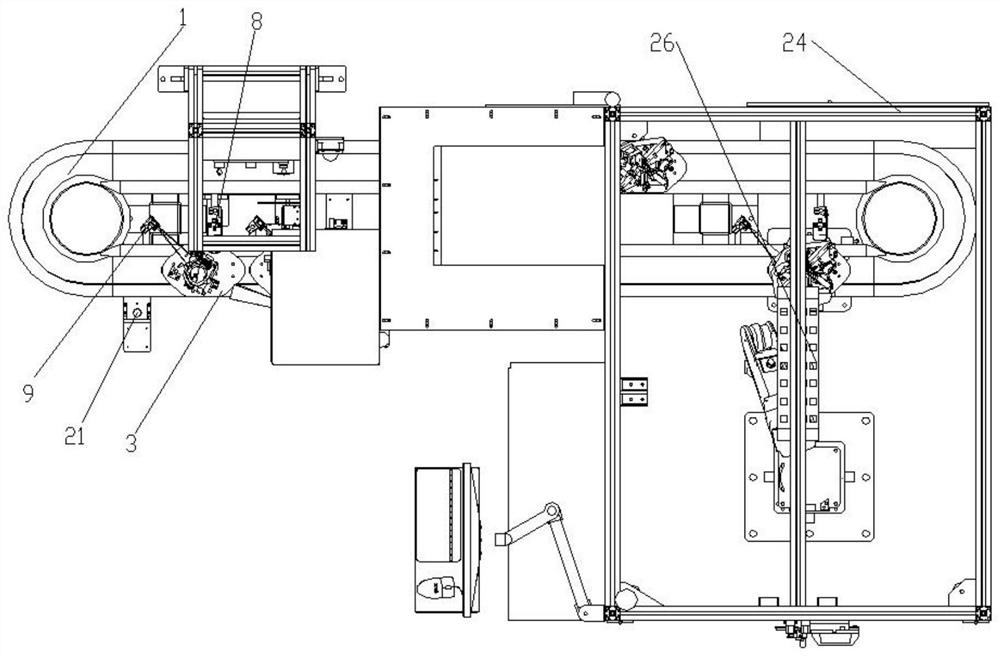
图2是本发明实施例提供的一种用于检测零件内部多异物的全自动柔性系统的俯视图;
图3显示了根据本发明一个实施例的用于检测零件内部多异物的全自动柔性系统的结构示意图;
图4显示了根据本发明又一个实施例的用于检测零件内部多异物的全自动柔性系统的结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
本实施例提供的一种用于检测零件内部多异物的全自动柔性系统通过上料机构将载有回用件零件的托盘通过扫码读取产品信息,RFID读取托盘信息,并与产品信息绑定,载有零件的托盘流动至检测机构,托盘顶升,扫码读取产品信息,与RFID读取的托盘信息对比,机器人带着光谱共焦传感器对回用件的特定位置进行探测,检测完成后,托盘回转至下料机构,扫零件码,读取托盘信息,状态OK则触摸按钮长绿,状态NG则长红,下料至规定位置。
如图1至图4所示,一种用于检测零件内部多异物的全自动柔性系统,包括柔性传送机构,所述柔性传输机构包括柔性传送带1和型材固定架2,所述型材固定架上依次设置有上料机构、检测机构和下料机构,所述上料机构包括托盘3、扫码枪4、上料RFID阅读器5、上料传感器6和上料挡停块7,所述下料机构包括下料RFID阅读器8、下料传感器9和下料挡停块10,所述托盘3设置在柔性传送带1上,所述托盘3上设置有定位仪,所述扫码枪4通过支架设于托盘3的上方,所述检测机构包括光谱共焦传感器11、顶升机构12、检测挡停块13、检测RFID阅读器14和检测传感器15,所述顶升机12构通过支架固接在型材固定架2上,所述光谱共焦传感器11与机械手16相连,所述机械手16通过旋转轴固定在机器人基座17上。
本实施例中,所述托盘3上设置有与上料RFID阅读器5、检测RFID阅读器14和下料RFID阅读器8相感应的磁码,所述上料RFID阅读器5、检测RFID阅读器14和下料RFID阅读器8均通过支架固定在型材固定架2上,所述型材固定架2在与上料机构相对的侧边设置有触摸屏18,所述触摸屏18配置有状态指示灯19。
本实施例中,所述上料机构上还设置有带有指示灯的启动按钮20和急停按钮21,所述启动按钮20通过支架固接在型材固定架2上,所述急停按钮21通过连接板与型材固定架2相连,所述上料传感器6、下料传感器9和检测传感器15均通过支架固定在型材固定架上,所述机器人基座17与机器人控制柜22相连,所述机器人控制柜22置于型材固定架2下方,所述上料挡停块7、下料挡停块10和检测挡停块13均设置在型材固定架2上且通过气管与气缸相连,所述气缸与电控箱23相连,所述下料机构设有下料口(图中未显示),所述下料口由合格件出料口和废品出料口组成。
本实施例中,所述检测机构外设置有防护罩24,所述防护罩24上设置有安全门锁25,所述防护罩24顶部设置有照明灯26,所述防护罩24外壁上设置有电脑显示屏27,所述电脑显示屏27与主机28相连,所述防护罩24外设置有电控箱23,所述电控箱23置于电脑显示屏27下方。
根据上述实施例中所述的一种用于检测零件内部多异物的全自动柔性系统,其工作原理为:将空的托盘3流转至上料位置上,上料挡停块7挡停托盘3,人工将回用件放到对应的托盘3上(不同项目对应不同的托盘),由于托盘3上设置有定位仪,可以保证检测位置的精确,通过上料传感器6检测零件的有无,扫码枪4扫零件码,读取产品信息,上料RFID阅读器5取托盘信息,并与产品信息绑定,特别地,通过上料RFID阅读器5识别托盘上的零件,可以调用不同项目的探测程序(不同项目探测的方向与位置不同),以满足多产品的使用,人工按下启动按钮20,此启动按钮20带有指示灯,启动按扭20触发后(上料传感器6检测回用件已上料),载有零件的托盘3流动至检测位。
载有回用件的托盘3流转至检测位,检测挡停块13将托盘3挡停,检测传感器15检测回用件的有无,检测RFID阅读器14读取托盘3上的磁码信息,并与上料RFID阅读器5读取的信息比对,信息匹配电控箱23调用相应的程序,顶升机构12将托盘3顶起,若检测传感器15检测结果有,机械手16带着光谱共焦传感器11对回用件的特定位置进行探测,探测后进行判断是否存在多异物(此技术异物主要指叶片),托盘3下降,检测挡停块13缩回,托盘3流转至下料位。
进一步地,采用光谱共焦传感器11进行探测,光谱共焦位移传感器是一种通过光学色散原理建立距离与波长件的对应关系,利用光谱仪解码光谱信息,从而获得位置信息的检测系统,光学传感器选取10mm探头,工作距离68mm,检测量程16mm(扩展量程),光斑大小32um,以上参数,经测试,可满足检测要求。
进一步地,检测位配置有照明灯26,由于检测系统由机械手16带动检测不同的位置,运动部件需防护起来,故设置有防护罩24,为维修维护方便及安全考虑,所述防护罩24上还设置有安全门锁25,特定人员才有权限进入。
载有检测完成的回用件托盘3流转至下料位,下料挡停块13挡停托盘3,下料RFID阅读器8读取托盘3上的磁码信息,检测状态通过触摸屏18上状态指示灯19显示,状态OK指示灯长绿,状态NG则长红,下料传感器9检测回用件是否已取下,若检测零件取下,则下料挡停块10缩回,空的托盘3可流转至上料位等候。
进一步地,整个系统还配置急停按钮7,出现突发情况可紧急按下,满足安全要求,此外,托盘流转通过柔性传送带1实现;设置有触摸屏18,可方便人机交互;设置的电脑显示屏27及主机28,实现Labview程序的存储于运行。
总而言之,根据上述实施例中所述的这种用于检测零件内部多异物的全自动柔性系统探测泵体内部是否存在异物,取代人工目视检测,安全可靠,有效避免安全事故的发生;采用RFID技术进行信息识别、匹配,环境适应能力强,对工作环境要求低,可快速响应;采用光谱共焦位移传感器,不受光晕及环境干扰影响,检测精度高;不同项目配置有不同的托盘,实现不通项目的精确定位,不同项目通过RFID技术调用不同的程序,可兼容多个项目的检测,通用性强;此零件内部多异物自动检测系统,自动化程度高,使用方便,便于维护,有效提高检测效率。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
以上所述实施例而已并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种用于检测零件内部多异物的全自动柔性系统
- 一种用于检测零件内部多异物的全自动柔性系统