一种可在喷筒旋转时前进的工业机器人喷涂装置
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及工业机器人技术领域,具体涉及一种可在喷筒旋转时前进的工业机器人喷涂装置。
背景技术
当前在使用工业机器人进行喷涂时,往往需要喷筒旋转喷涂;当遇到地面前进不了的地方时,需要伸长喷筒进行喷涂,在伸长过程中不够稳定,容易发生偏移抖动,且喷筒不易拆卸,不易清洁,容易造成堵塞,为此,现提出一种可在喷筒旋转时前进的工业机器人喷涂装置。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提出一种可在喷筒旋转时前进的工业机器人喷涂装置,结构简单,且各个部件都可取下进行清理,减少堵塞的可能性,提高喷涂装置的使用寿命;既便于安装,同时装置在移动时更加稳定,在旋转喷洒时能够保持稳定,不会发生偏移抖动,提高了实用性。
为实现上述目的,本发明采用的技术方案是:它包含工业机器人主体和出料管;工业机器人主体上设有出料管;
它还包含喷涂机构、和伸缩机构;出料管上连接有喷涂机构;所述的喷涂机构包含一号内螺纹管、一号螺纹管、波纹管、二号螺纹管、二号内螺纹管、一号连接管、转移管、二号连接管、三号连接管、转轴、冲击板、旋转管、连接杆、扩管和圆板;一号内螺纹管与出料管螺纹旋接;一号内螺纹管的左端旋接插设有一号螺纹管,一号螺纹管内插设固定有波纹管;波纹管的另一端插设固定在二号螺纹管内,二号螺纹管旋接插设在二号内螺纹管内;二号内螺纹管左端旋接插设有一号连接管,且一号连接管与波纹管贯穿连接;一号连接管的左侧壁上部开设有出口,一号连接管的左侧壁上部固定有转移管,转移管与出口贯穿连接;转移管的下方设有二号连接管,一号连接管与二号连接管固定;转移管和二号连接管之间贯穿设有三号连接管;二号连接管内设有转轴,转轴上呈环形分布固定有数个冲击板,冲击板位于三号连接管的下方;转轴的右端通过轴承与一号连接管的左侧壁旋接;二号连接管的左侧环壁通过密封轴承旋接有旋转管,转轴的左端呈环形分布固定有数个连接杆,连接杆的外端固定在旋转管的内环壁上;旋转管的左侧环壁上与扩管固定,扩管的左侧环壁上固定有圆板,圆板上开设有数个喷洒孔;
喷涂机构上设有伸缩机构;所述的伸缩机构包含连接板、一号固定板、一号固定螺栓、二号固定螺栓、安装板、电机、二号螺杆、三号内螺纹管、二号固定板、三号固定板、三号固定螺栓、四号固定螺栓、二号限位板、二号限位杆、三号限位杆和滑块;一号内螺纹管的上端右侧设有连接板;一号内螺纹管的右侧环壁上端开设有一号螺纹孔,连接板的右侧壁下部开设有二号螺纹孔;一号螺纹孔和二号螺纹孔的右侧设有一号固定板,一号固定螺栓和二号固定螺栓旋接穿过一号固定板后,分别与一号螺纹孔和二号螺纹孔旋接;一号内螺纹管上开设有卡槽,安装板的下端卡设在卡槽中;安装板的左侧壁上固定有电机,电机通过导线与工业机器人主体的电源连接;电机的输出轴上固定有二号螺杆,二号螺杆的左端旋接插设在三号内螺纹管内;三号内螺纹管的左端固定有二号固定板;二号内螺纹管的左端开设有五号螺纹孔,二号固定板的左侧开设有六号螺纹孔;五号螺纹孔和六号螺纹孔的左侧设有三号固定板,三号固定螺栓和四号固定螺栓旋接穿过三号固定板后,分别与五号螺纹孔和六号螺纹孔旋接;二号固定板的上端固定有前后两个二号限位板,二号限位板之间通过轴和轴承旋接有二号限位杆;二号限位杆的右侧前后均设有三号限位杆,三号限位杆的内侧壁上开设有滑槽,二号限位杆的右端前后均固定有滑块,滑块滑动设于滑槽内;连接板的上端开设有二号通槽,三号限位杆的右端通过轴和轴承与二号通槽的前后侧壁旋接。
进一步地,一号内螺纹管的环壁前侧固定有一号把手,一号把手转动一号内螺纹管。
进一步地,二号内螺纹管的环壁前侧固定有二号把手,二号把手转动二号内螺纹管。
进一步地,安装板的底部固定有橡胶垫,橡胶垫设于卡槽底部,橡胶垫稳定卡设安装板。
进一步地,连接板的中间开设有一号通槽,一号限位杆的左端通过轴和轴承与一号通槽的前后侧壁旋接;工业机器人主体上固定有前后两个一号限位板,一号限位板上开设有三号螺纹孔;一号限位杆的右端开设有四号螺纹孔,一号螺杆旋接穿设在三号螺纹孔、四号螺纹孔中;将一号限位杆放置在前后两个一号限位板之间,一号螺杆旋接穿设在三号螺纹孔、四号螺纹孔,将一号限位杆固定在两个一号限位板之间。
进一步地,一号螺杆的前端固定有手拧,手拧转动一号螺杆。
本发明的工作原理:使用时,将一号内螺纹管与出料管螺纹旋接,使得喷涂机构与工业机器人主体连接,将一号固定板设于一号螺纹孔和二号螺纹孔的右侧,一号固定螺栓和二号固定螺栓旋接穿过一号固定板后,分别与一号螺纹孔和二号螺纹孔旋接,使得连接板与一号内螺纹管固定,三号固定板设于五号螺纹孔和六号螺纹孔的左侧,三号固定螺栓和四号固定螺栓旋接穿过三号固定板后,分别与五号螺纹孔和六号螺纹孔旋接,使得二号内螺纹管与二号固定板固定;将安装板卡设在卡槽内,使得电机稳定;启动工业机器人主体进行出料,液体经过出料管流出,经过波纹管流向一号连接管、转移管,经过三号连接管喷向冲击板,使得冲击板带动转轴转动,从而使得连接杆带动旋转管转动,液体从圆板上的喷洒孔中旋转喷出;需要前进时,启动电机,电机的输出轴转动,使得二号螺杆转动,带动三号内螺纹管移动,使得扩管移动,此时二号限位杆上的滑块在滑槽内移动;进行清理时,旋下一号固定螺栓、二号固定螺栓、三号固定螺栓、四号固定螺栓,使得伸缩机构与喷涂机构分离,转动一号内螺纹管,将一号内螺纹管从出料管上取下,转动二号内螺纹管,将二号内螺纹管与一号连接管分离,转动一号螺纹管、二号螺纹管,将波纹管取下,分别对各个部件进行清理。
采用上述结构后,本发明有益效果为:
1、喷涂机构结构简单,且各个部件都可取下进行清理,减少堵塞的可能性,提高喷涂装置的使用寿命;
2、设有可拆卸的伸缩机构,既便于安装,同时使得三号内螺纹管在移动时更加稳定,扩管在旋转喷洒时能够保持稳定,不会发生偏移抖动,提高了实用性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1是本发明的结构示意图。
图2是图1的中的A-A向剖视图。
图3是图1的俯视图。
图4是图3中的B部放大图。
图5是图3中的C-C向剖视图。
图6是图5中的D部放大图。
图7是图5中的E部放大图。
图8是图5中的F部放大图。
图9是图5中的G部放大图。
附图标记说明:
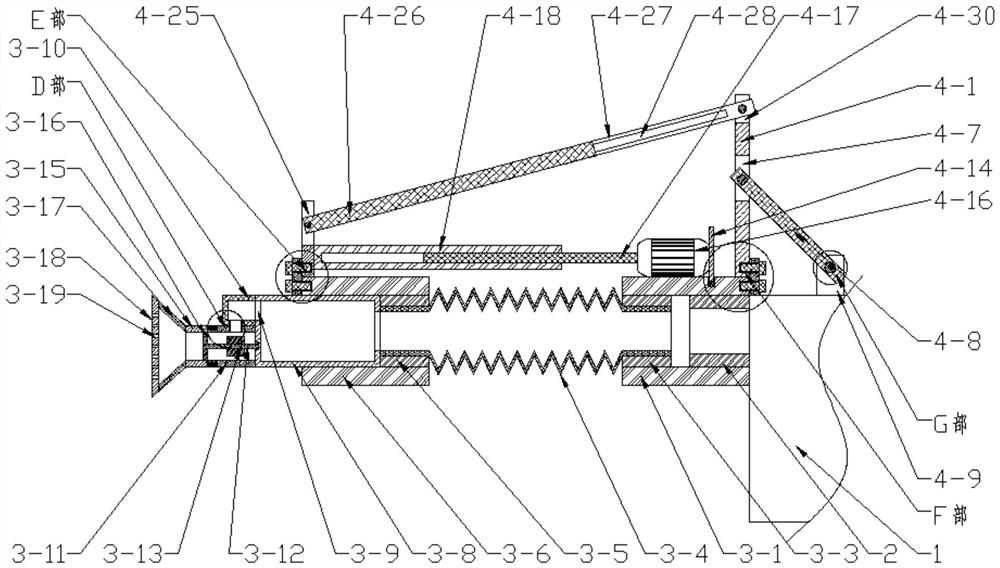
工业机器人主体1、出料管2、喷涂机构3、一号内螺纹管3-1、一号把手3-2、一号螺纹管3-3、波纹管3-4、二号螺纹管3-5、二号内螺纹管3-6、二号把手3-7、一号连接管3-8、出口3-9、转移管3-10、二号连接管3-11、三号连接管3-12、转轴3-13、冲击板3-14、旋转管3-15、连接杆3-16、扩管3-17、圆板3-18、喷洒孔3-19、伸缩机构4、连接板4-1、一号螺纹孔4-2、二号螺纹孔4-3、一号固定板4-4、一号固定螺栓4-5、二号固定螺栓4-6、一号通槽4-7、一号限位杆4-8、一号限位板4-9、三号螺纹孔4-10、四号螺纹孔4-11、手拧4-12、卡槽4-13、安装板4-14、橡胶垫4-15、电机4-16、二号螺杆4-17、三号内螺纹管4-18、二号固定板4-19、五号螺纹孔4-20、六号螺纹孔4-21、三号固定板4-22、三号固定螺栓4-23、四号固定螺栓4-24、二号限位板4-25、二号限位杆4-26、三号限位杆4-27、滑槽4-28、滑块4-29、二号通槽4-30、一号螺杆4-31。
具体实施方式
下面结合附图对本发明作进一步的说明。
参看如图1至图9所示,本具体实施方式采用的技术方案是:它包含工业机器人主体1、出料管2、喷涂机构3、和伸缩机构4;工业机器人主体1上设有出料管2;出料管2上连接有喷涂机构3;所述的喷涂机构3包含一号内螺纹管3-1、一号把手3-2、一号螺纹管3-3、波纹管3-4、二号螺纹管3-5、二号内螺纹管3-6、二号把手3-7、一号连接管3-8、转移管3-10、二号连接管3-11、三号连接管3-12、转轴3-13、冲击板3-14、旋转管3-15、连接杆3-16、扩管3-17和圆板3-18;一号内螺纹管3-1与出料管2螺纹旋接;一号内螺纹管3-1的环壁前侧通过螺栓固定有一号把手3-2,一号把手3-2便于转动一号内螺纹管3-1;一号内螺纹管3-1的左端旋接插设有一号螺纹管3-3,一号螺纹管3-3内插设固定有波纹管3-4;波纹管3-4的另一端插设固定在二号螺纹管3-5内,二号螺纹管3-5旋接插设在二号内螺纹管3-6内;二号内螺纹管3-6的环壁前侧通过螺栓固定有二号把手3-7,二号把手3-7便于转动二号内螺纹管3-6;二号内螺纹管3-6左端旋接插设有一号连接管3-8,且一号连接管3-8与波纹管3-4贯穿连接;一号连接管3-8的左侧壁上部开设有出口3-9,一号连接管3-8的左侧壁上部焊接固定有转移管3-10,转移管3-10与出口3-9贯穿连接;转移管3-10的下方设有二号连接管3-11,一号连接管3-8与二号连接管3-11焊接固定;转移管3-10和二号连接管3-11之间贯穿设有三号连接管3-12;二号连接管3-11内设有转轴3-13,转轴3-13上呈环形分布焊接固定有数个冲击板3-14,冲击板3-14位于三号连接管3-12的下方;转轴3-13的右端通过轴承与一号连接管3-8的左侧壁旋接;二号连接管3-11的左侧环壁通过密封轴承旋接有旋转管3-15,转轴3-13的左端呈环形分布焊接固定有数个连接杆3-16,连接杆3-16的外端焊接固定在旋转管3-15的内环壁上;旋转管3-15的左侧环壁上与扩管3-17焊接固定,扩管3-17的左侧环壁上焊接固定有圆板3-18,圆板3-18上开设有数个喷洒孔3-19;
喷涂机构3上设有伸缩机构4;所述的伸缩机构4包含连接板4-1、一号固定板4-4、一号固定螺栓4-5、二号固定螺栓4-6、一号限位杆4-8、一号限位板4-9、手拧4-12、安装板4-14、橡胶垫4-15、电机4-16、二号螺杆4-17、三号内螺纹管4-18、二号固定板4-19、三号固定板4-22、三号固定螺栓4-23、四号固定螺栓4-24、二号限位板4-25、二号限位杆4-26、三号限位杆4-27、滑块4-29和一号螺杆4-3;一号内螺纹管3-1的上端右侧设有连接板4-1;一号内螺纹管3-1的右侧环壁上端开设有一号螺纹孔4-2,连接板4-1的右侧壁下部开设有二号螺纹孔4-3;一号螺纹孔4-2和二号螺纹孔4-3的右侧设有一号固定板4-4,一号固定螺栓4-5和二号固定螺栓4-6旋接穿过一号固定板4-4后,分别与一号螺纹孔4-2和二号螺纹孔4-3旋接;连接板4-1的中间开设有一号通槽4-7,一号限位杆4-8的左端通过轴和轴承与一号通槽4-7的前后侧壁旋接;工业机器人主体1上通过螺栓固定有前后两个一号限位板4-9,一号限位板4-8上开设有三号螺纹孔4-10;一号限位杆4-8的右端开设有四号螺纹孔4-11,一号螺杆4-31旋接穿设在三号螺纹孔4-10、四号螺纹孔4-11中;一号限位杆4-9起到了加固的作用;一号螺杆4-31的前端焊接固定有手拧4-12,手拧4-12便于转动一号螺杆4-31;一号内螺纹管3-1上开设有卡槽4-13,安装板4-14的下端卡设在卡槽4-13中;安装板4-14的底部通过胶水粘贴固定有橡胶垫4-15,橡胶垫4-15设于卡槽4-13底部,橡胶垫4-15便于稳定安装板4-14的作用;安装板4-14的左侧壁上通过螺栓固定有电机4-16,电机4-16的型号为m540-402,电机4-16通过导线与工业机器人主体1的电源连接;电机4-16的输出轴上焊接固定有二号螺杆4-17,二号螺杆4-17的左端旋接插设在三号内螺纹管4-18内;三号内螺纹管4-18的左端焊接固定有二号固定板4-19;二号内螺纹管3-6的左端开设有五号螺纹孔4-20,二号固定板4-19的左侧开设有六号螺纹孔4-21;五号螺纹孔4-20和六号螺纹孔4-21的左侧设有三号固定板4-22,三号固定螺栓4-23和四号固定螺栓4-24旋接穿过三号固定板4-22后,分别与五号螺纹孔4-20和六号螺纹孔4-21旋接;二号固定板4-19的上端焊接固定有前后两个二号限位板4-25,二号限位板4-25之间通过轴和轴承旋接有二号限位杆4-26;二号限位杆4-26的右侧前后均设有三号限位杆4-27,三号限位杆4-27的内侧壁上开设有滑槽4-28,二号限位杆4-26的右端前后均焊接固定有滑块4-29,滑块4-29滑动设于滑槽4-28内;连接板4-1的上端开设有二号通槽4-30,三号限位杆4-27的右端通过轴和轴承与二号通槽4-30的前后侧壁旋接。
本具体实施方式的工作原理:使用时,将一号内螺纹管3-1与出料管2螺纹旋接,使得喷涂机构3与工业机器人主体1连接,将一号固定板4-4设于一号螺纹孔4-2和二号螺纹孔4-3的右侧,一号固定螺栓4-5和二号固定螺栓4-6旋接穿过一号固定板4-4后,分别与一号螺纹孔4-2和二号螺纹孔4-3旋接,使得连接板4-1与一号内螺纹管3-1固定,三号固定板4-22设于五号螺纹孔4-20和六号螺纹孔4-21的左侧,三号固定螺栓4-23和四号固定螺栓4-24旋接穿过三号固定板4-22后,分别与五号螺纹孔4-20和六号螺纹孔4-21旋接,使得二号内螺纹管3-6与二号固定板4-19固定;将一号限位杆4-8放置在前后两个一号限位板4-9之间,利用手拧4-12转动一号螺杆4-31,使得旋接穿设在三号螺纹孔4-10、四号螺纹孔4-11内,将一号限位杆4-8固定在两个一号限位板4-9之间;将安装板4-14卡设在卡槽4-13内,使得电机4-16稳定,橡胶垫4-15设于卡槽4-13底部,橡胶垫4-15起到了稳定卡设的作用;启动工业机器人主体1进行出料,液体经过出料管2流出,经过波纹管3-4流向一号连接管3-8、转移管3-10,经过三号连接管3-12喷向冲击板3-14,使得冲击板3-14带动转轴3-13转动,从而使得连接杆3-16带动旋转管3-15转动,液体从圆板3-18上的喷洒孔3-19中旋转喷出;需要前进时,启动电机4-16,电机4-16的输出轴转动,使得二号螺杆4-17转动,带动三号内螺纹管4-18移动,使得扩管3-17移动,此时二号限位杆4-26上的滑块4-29在滑槽4-28内移动,使得三号内螺纹管4-18在移动时更加稳定,扩管3-17在旋转喷洒时能够保持稳定,不会发生偏移抖动;进行清理时,旋下一号固定螺栓4-5、二号固定螺栓4-6、三号固定螺栓4-23、四号固定螺栓4-24,使得伸缩机构4与喷涂机构3分离,利用一号把手3-2转动一号内螺纹管3-1,将一号内螺纹管3-1从出料管2上取下,利用二号把手3-7转动二号内螺纹管3-6,将二号内螺纹管3-6与一号连接管3-8分离,转动一号螺纹管3-3、二号螺纹管3-5,将波纹管3-4取下,可分别对各个部件进行清理。
采用上述结构后,本具体实施方式的有益效果为:
1、喷涂机构3结构简单,且各个部件都可取下进行清理,减少堵塞的可能性,提高喷涂装置的使用寿命;
2、设有可拆卸的伸缩机构4,既便于安装,同时使得三号内螺纹管4-18在移动时更加稳定,扩管3-17在旋转喷洒时能够保持稳定,不会发生偏移抖动,提高了实用性。
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种可在喷筒旋转时前进的工业机器人喷涂装置
- 一种可在喷筒旋转时前进的工业机器人喷涂装置