一种基于数据驱动的机械结构实时疲劳寿命预测方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及机械产品的疲劳裂纹的检测与预测技术领域,特别是指一种基于数据驱动的机械结构实时疲劳寿命预测方法。
背景技术
在机械材料加工过程,不可避免的会出现空洞、夹杂及裂纹等缺陷,在复杂工况及循环载荷作用情况下,产生应力过度集中,引发疲劳断裂,甚至会造成灾难性后果。据统计,疲劳断裂造成的破坏约占到全部力学破坏的50%-90%,这都与工程结构中存在的缺陷相关。为了预防安全事故,减少经济损失,预测机械结构的剩余疲劳寿命成为人们关注的重点。
随着计算力学及计算机技术的发展,越来越多的数值方法被用来模拟机械结构裂纹的扩展,进而预测机械结构的疲劳寿命。使用数值方法可以精确模拟裂纹的扩展过程,掌握裂纹扩展规律,从而进行机械结构的强度分析和寿命预测。在这些数值方法中,最为有效的两种方法分别为有限元法与边界元法。
有限元法进行裂纹的扩展模拟时应力、应变精度比位移低一阶,裂纹尖端高应力区需要布置高密度网格,并且裂纹只能限制在网格线上,将裂纹面设置为单元的边界、裂尖设置为单元的节点,模拟裂纹扩展时,随着裂纹的扩展,网格需要重新划分。在有限元框架中发展起来的扩展有限元,在常规单元形函数中加入能反映不连续性的阶跃函数及裂尖渐进位移场函数。网格与裂纹相互独立,裂纹扩展不需重构网格,能方便地分析含裂纹体的强不连续问题。然而,为了获得裂纹扩展高精度模拟结果,依然需要大量的网格。边界元法作为一种半解析的数值方法,利用的面力和位移具有同阶精度的优势,可提高机械结构应变、应力分析的精度,在裂纹扩展模拟中更具优势。边界元法基本解的奇异性质,更适合用于机械结构实时疲劳寿命预测这类应力奇异性问题。
由于使用Paris模型,机械结构参数的不确定性,Paris模型中的系数需要通过试验测定大量的数据点进行拟合获得,带有随机性。如果使用摄动法来处理的话,往往需要应用到先验知识。由于裂纹扩展过程参数的变换,摄动技术难以与数值方法结合,应用于裂纹扩展分析。这就给对偶互易边界元法预测机械结构实时疲劳寿命是带来了巨大挑战。
近年来,机器学习技术引起了人们的关注。反向传播神经网络(BPNN)作为人工神经网络中的一种,目前已经在基于大量物理实验或数值模拟数据集的工程预测问题中获得了成功应用。计算方法与神经网络技术相结合,在处理裂纹分析中显示出巨大的潜力。然而,关于机械结构的实时疲劳寿命预测的文献很少。
发明内容
针对上述背景技术中存在的不足,本发明提出了一种基于数据驱动的机械结构实时疲劳寿命预测方法,解决了现有技术中无法预测机械结构的疲劳寿命,造成机械结构的检测精度降低的技术问题。
本发明的技术方案是这样实现的:
一种基于数据驱动的机械结构实时疲劳寿命预测方法,其步骤如下:
步骤一:根据试验手段获得机械结构中对应的Paris模型的指数m和系数c的取值范围,并分别在指数m和系数c的取值范围内采用优先数系生成一系列指数和系数,得到Q组Paris模型参数对(m
步骤二:在机械结构上设置观测点,针对第q组Paris模型参数对(m
步骤三:循环执行步骤二,直至遍历Q组Paris模型参数对,得到数据集,并将数据集分为训练集和测试集,其中,数据集包括一系列数据信息对;
步骤四:将训练集输入BP神经网络中进行训练,得到BP神经网络模型,并利用测试集对BP神经网络模型进行验证;
步骤五:采集机械结构中观测点的位移,并将观测点的位移输入BP神经网络模型中,得到机械结构的实时疲劳寿命信息。
所述使用对偶互易边界元法对机械结构进行疲劳裂纹扩展分析,获得观测点的位移和实时疲劳寿命信息的方法为:
S2.1、构建对偶互易边界积分方程,包括位移边界积分方程和面力边界积分方程;
S2.2、分别对位移边界积分方程和面力边界积分方程进行离散处理,得到:
其中,H
S2.3、对公式(5)施加边界条件,并整理得到:
其中,A
利用高斯消去法对公式(6)求解,获得边界的位移和面力,并将边界的位移和面力代入公式(1)中获得观测点的位移;
S2.4、根据边界的位移利用相互作用积分算法计算混合模态应力强度因子:
其中,M
S2.5、将公式(7)转化为:
其中,E为杨氏模型,
S2.6、计算混合模态应力强度因子△K
其中,K
S2.7、采用最大周向应力准则确定裂纹方向:
其中,θ为裂纹扩展角,sign表示符号函数;
S2.8、根据混合模态应力强度因子△K
其中,a为裂纹长度,N为应力循环次数;
S2.9、根据裂纹的初始长度a
其中,1≤t≤T;
S2.10、将载荷循环次数△N
所述位移边界积分方程包括非裂纹边界上对应的位移边界积分方程和裂纹上边界对应的位移边界积分方程;所述面力边界积分方程是指裂纹下边界对应的面力边界积分方程;
S2.1.1、构建源点落在非裂纹边界上对应的位移边界积分方程:
其中,
对公式(1)进行整理合并,可得:
S2.1.2、构建源点落在裂纹上边界对应的位移边界积分方程:
其中,
S2.1.3、构建源点落在裂纹下边界对应的面力边界积分方程:
其中,
在裂纹的扩展过程中,当前裂纹长度为a
进行第二步扩展,得到第二步扩展的载荷循环次数△N
进行第三步扩展,得到第三步扩展的载荷循环次数△N
同样的第四步扩展一直到第T-1步扩展,相应的载荷循环次数为△N
进行第T步扩展,得到得到第T步扩展的载荷循环次数△N
因此,机械结构的总寿命为△N=△N
所述将训练集输入BP神经网络中进行训练,得到BP神经网络模型的方法为:
S4.1、网络初始化:确定输入层、隐含层和输出层的节点数,初始化连接权值W
S4.2、计算隐含层节点的输出:
其中,h
S4.3、计算输出层节点的输出:
其中,y
S4.4、计算第z个训练数据的预期输出与预测输出之间的误差e
其中,y
S4.5、更新神经网络的连接权值:
ω
其中,p为迭代次数,△ω
S4.6、判断迭代次数是否达到最大迭代次数或者Z个输入信号的总误差E'小于误差阈值,若是,输出BP神经网络模型,否则,返回步骤S4.2进行下一次的迭代。
本技术方案能产生的有益效果:本发明利用对偶互易边界元法生成一系列结构响应和相应的疲劳寿命数据集,并利用这些数据集对BP神经网络预测模型进行训练和测试,建立关于观测点位置的结构响应与疲劳寿命关联的实时疲劳寿命预测模型,在实际工程中通过对机械结构的观测点位置的响应试验测试来确定实时疲劳寿命信息,避免了检测精度降低的问题,节省大量的时间和成本。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的BP神经网络拓扑结构。
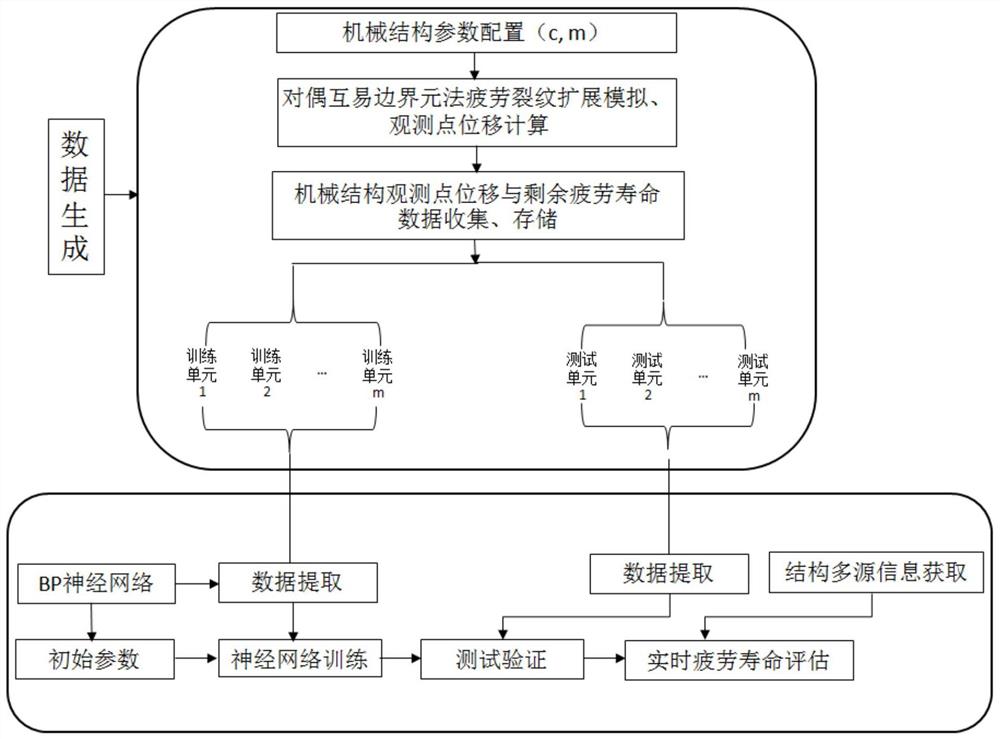
图2为本发明的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图2所示,本发明实施例提供了一种基于数据驱动的机械结构实时疲劳寿命预测方法,由于机械结构中对应的Paris模型指数m和系数c不确定,通过试验手段得出取值范围,在此取值范围内,按照优先数系生产关于m和c的一系列数据,并进行配对(m,c)。针对该机械结构,在容易测试部位取观测点,分别取每一组(m,c)进行循环,使用对偶互易边界元法进行疲劳裂纹扩展分析,每一步扩展都会获得观测点的位移值以及相应的实时疲劳寿命信息,组成数据信息对,存储起来,保存到一个单元中。直至所有的(m,c)循环完毕,将单元分为训练单元和测试单元。然后利用训练单元对BP神经网络模型进行训练。利用测试单元对训练好的BP神经网络模型进行验证。这样就完全建立起来观测点位移与实时疲劳寿命信息的关系,因此,可以仅通过观测点位移,利用建立好的BP神经网络模型获得相应的实时疲劳寿命信息。具体步骤如下:
步骤一:根据试验手段获得机械结构中对应的Paris模型的指数m和系数c的取值范围,并分别在指数m和系数c的取值范围内采用优先数系生成一系列指数和系数,得到Q组Paris模型参数对(m
步骤二:在机械结构上设定观测点,针对第q组Paris模型参数对(m
S2.1、构建对偶互易边界积分方程,包括位移边界积分方程和面力边界积分方程;所述位移边界积分方程包括非裂纹边界上对应的位移边界积分方程和裂纹上边界对应的位移边界积分方程;所述面力边界积分方程是指裂纹下边界对应的面力边界积分方程。
S2.1.1、构建源点落在非裂纹边界上对应的位移边界积分方程:
其中,
对公式(1)进行整理合并,可得:
S2.1.2、构建源点落在裂纹上边界对应的位移边界积分方程:
其中,
S2.1.3、构建源点落在裂纹下边界对应的面力边界积分方程:
其中,
S2.2、分别对位移边界积分方程和面力边界积分方程进行离散处理,得到:
其中,H
S2.3、对公式(5)施加边界条件,将未知量调到方程左边,已知量调到方程的右端,并整理得到:
其中,A
利用高斯消去法对公式(6)求解,获得未知量,并进行未知量配置,获得边界的位移和面力,并将边界的位移和面力代入公式(1)中获得观测点的位移。
S2.4、为了评价疲劳裂纹的扩展,需要利用对偶互易边界元法计算应力强度因子,应力强度因子是判断裂纹扩展与否的重要参数。此外,还根据应力强度因子计算了裂纹扩展方向和扩展量。利用相互作用积分算法计算了混合模态应力强度因子,其相互作用积分M表达式为:
其中,M
S2.5、将公式(7)转化为:
其中,E为杨氏模型,
S2.6、根据机械结构材料的断裂韧性K
其中,K
S2.7、在裂纹扩展的情况下,确定裂纹扩展方向。采用最大周向应力准则确定裂纹方向:
其中,θ为裂纹扩展角,sign表示符号函数。
S2.8、用对偶边界元法进行疲劳寿命预测时,需要建立一个描述裂纹扩展过程的疲劳裂纹扩展模型。根据混合模态应力强度因子△K
其中,a为裂纹长度,N为应力循环次数。m为Paris模型指数,c为Paris模型常数,△K
S2.9、根据裂纹的初始长度a
其中,1≤t≤T。
S2.10、将载荷循环次数△N
在裂纹的扩展过程中,当前裂纹长度为a
同样的第二步扩展,可以得到:
第三步扩展,可以得到:
同样的第四步一直到第T-1步扩展,相应的载荷循环次数△N
第T步扩展:
总的寿命N=△N
在非裂纹边界上布置观测点(这些观测点容易用实验仪器测量),在扩展的每一步,都使用公式(1)计算出观测点的位移,将观测点的位移与此阶段机械结构的疲劳寿命组成数据对存储起来。
步骤三:循环执行步骤二,直至遍历Q组Paris模型参数对,得到数据集,并将数据集分为训练集和测试集,其中,数据集包括一系列数据信息对。
步骤四:将训练集输入BP神经网络中进行训练,得到BP神经网络模型,并利用测试集对BP神经网络模型进行验证。为了建立数据驱动的预测模型,首先根据试验得来的数据范围,根据优先数系生成pairs模型指数m和系数c的一系列数据,针对每一个系数对(m,c),利用对偶互易边界元法计算出来观测点位置的结构响应与疲劳寿命配对的大量数据集,构造一个反向传播神经网络来学习这些数据集。反向传播神经网络是一种基于误差反向传播技术的多层前向神经网络由一个输入层、一个或多个隐藏层和一个输出层组成。
图1中的圆圈称为偏置节点。利用数据集对BP神经网络进行训练,具体步骤如下:
S4.1、网络初始化:确定输入层、隐含层和输出层的节点数,初始化连接权值W
S4.2、计算隐含层节点的输出:
其中,h
S4.3、计算输出层节点的输出:
其中,y
S4.4、计算第z个训练数据的预期输出与预测输出之间的误差e
其中,y
S4.5、更新神经网络的连接权值:
ω
其中,p为迭代次数,△ω
S4.6、判断迭代次数是否达到最大迭代次数或者Z个输入信号的总误差E'小于误差阈值,若是,输出BP神经网络模型,否则,返回步骤S4.2进行下一次的迭代。
步骤五:采集机械结构中观测点的位移,并将观测点的位移输入BP神经网络模型中,得到机械结构的实时疲劳寿命信息。
本发明是将对偶互易边界元法与BP神经网络相结合。首先,利用对偶互易边界元法模拟一系列机械结构的疲劳裂纹扩展寿命分析。在每次模拟中,利用从机械结构中采取的数据,采用优先数系生成一系列参数数据集。所获得的数据集包含固定观测点的结构响应和疲劳寿命的信息。此外,每次模拟获得的数据集被保存在一个单元中。然后,利用训练单元对BP神经网络模型进行训练。利用测试单元对训练好的BP神经网络模型进行验证。最后,可以利用训练好的BP神经网络模型在未知模型参数时实现结构疲劳寿命的实时预测。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于数据驱动的机械结构实时疲劳寿命预测方法
- 一种基于概率累积损伤的疲劳寿命实时预测方法