一种离网型风力发电系统和方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及风力发电技术领域,尤其是一种离网型风力发电系统和方法。
背景技术
近年来,风力发电装机容量迅猛增长,我国到2020年止的风电总装机容量将突破30GW。目前风力发电的方式有两种:并网型风电和离网型风电。在并网模式下,风力发电由于风能的随机性和间歇性,将会给电网带来电压和频率波动等电能质量问题,甚至威胁电网的稳定性。此外,风电场通常位于风能资源丰富但远离负荷中心的偏远地区,输送电能给电网需要很长的传输线,升级和维护成本都很高。同时,我国风能总量虽大,但是风力分布不均,密度不等,地形条件复杂多样,由此独立运行的离网型风力发电的优势显而易见,尤其是在电网无法到达地区将会有较大作为。
现阶段的离网型风力发电系统普遍采用背靠背的交直交拓扑结构。风力发电机将风能转化成交流电,经过整流后再逆变,调节成符合用户端电能质量要求的交流电。整个系统需要投入大量的电力电子设备、储能装置,发电成本较高,特别是在偏远农村地区的小型供电。然而,如果把终端负荷换成一系列能适应风电特性的高耗能产业,比如工厂电热锅炉、制氢设备等等,而不是居民负荷,则可以充分发挥离网型风力发电的优势——高效吸收和利用风能。这些高耗能产业一定程度上对电能质量要求不高,因此可以缩减电力电子设备的投入,大大节省发电成本。当然离网型风力发电系统也面临着一些技术挑战,比如风能的波动或间歇性、不可预测的负荷功率波动、相对较低的系统惯量都将导致系统稳定性下降。
因此,行业内急需研发一种可以减轻外部扰动和模型不确定性影响,保证稳定运行的离网型风电系统。
发明内容
本发明的目的在于解决现有技术的缺陷和不足,提出一种离网型风力发电系统和方法。该系统对电力电子设备的投入需求小,减少了电力电子设备所需要的设备成本和维护成本,同时提高了对风能的利用效率。另外所设计的鲁棒滑模控制器简单高效,增强了风电系统受到风力波动、负荷变化等扰动后维持稳定运行的能力。
本发明的目的通过如下技术方案实现:
一种离网型风力发电系统,包括风力发电机、主负荷、可调热负荷、变压器和用于实现最大风能跟踪的控制装置;风力发电机分别、变压器、主负荷依次连接;风力发电机分别还和可调热负荷连接;控制装置和可调热负荷连接。
优选地,控制装置是用于控制风力发电机以最大功率点输出的鲁棒滑模控制器。
优选地,风力发电机包括依次连接的风力机和永磁同步发电机 (PMSG);永磁同步发电机和主负荷、可调热负荷均连接。
优选地,主负荷为电热水锅炉或者制氢装置。
优选地,若主负荷为制氢装置,主负荷包括依次连接的不可控整流桥、直流电容、N组DC/DC变换器、N组滤波器和N组电解槽堆,N≥1;DC/DC 变换器和还和电解槽堆连接。
优选地,可调热负荷是厂用热负荷或储热设备。
优选地,可调热负荷包括K组并联的三相电阻器组成,K≥1。
一种离网型风力发电方法,包括:
S1,风力发电机将风能转化成电能,通过变压器将电能输送给主负荷和可调热负荷;
S2,控制装置采集风力发电机出口母线的电压频率和风速,控制装置以控制风力发电机达到最大功率点输出为目标对电压频率和风速进行计算,生成控制信号;将控制信号发送至主负荷和可调热负荷;
S3,可调热负荷根据控制信号采用机械投切电阻的方式改变可调热负荷投入风力发电系统的容量,从而改变风力发电机的转速。
优选地,步骤S2包括:
控制装置采集风力发电机的风速,并根据风速计算出风力发电机的最佳转速参考值ω
通过锁相环(PLL)采集风力发电机母线电压u
控制装置通过控制规律计算出控制信号;并将控制信号发送至热负荷可调。
优选地,最佳转速ω
ω
ω
其中,λ
控制装置通过控制规律计算出控制信号的公式如下:
其中,u为控制信号,e为误差输入,s为滑模函数,sat(s,δ)为饱和函数,g(ω
误差输入e、滑模函数s、饱和函数sat(s,δ)、控制函数g(ω
e=ω
其中,δ为正数;k
本发明相对于现有技术具有如下的优点及效果:
1、本发明充分发挥了离网型风力发电系统高效利用风能的优势,启动风速低,发电成本低,安装简便。
2、本发明与传统离网型风电系统相比,对电力电子设备的需求小,大大减少了电力电子设备所需要的设备成本和维护成本。
3、本发明所提出的鲁棒滑模控制器,需要的输入信号便于采集,调节速度快,抗干扰能力强,能有效维持系统的稳定运行,同时实现最大风能的跟踪。
附图说明
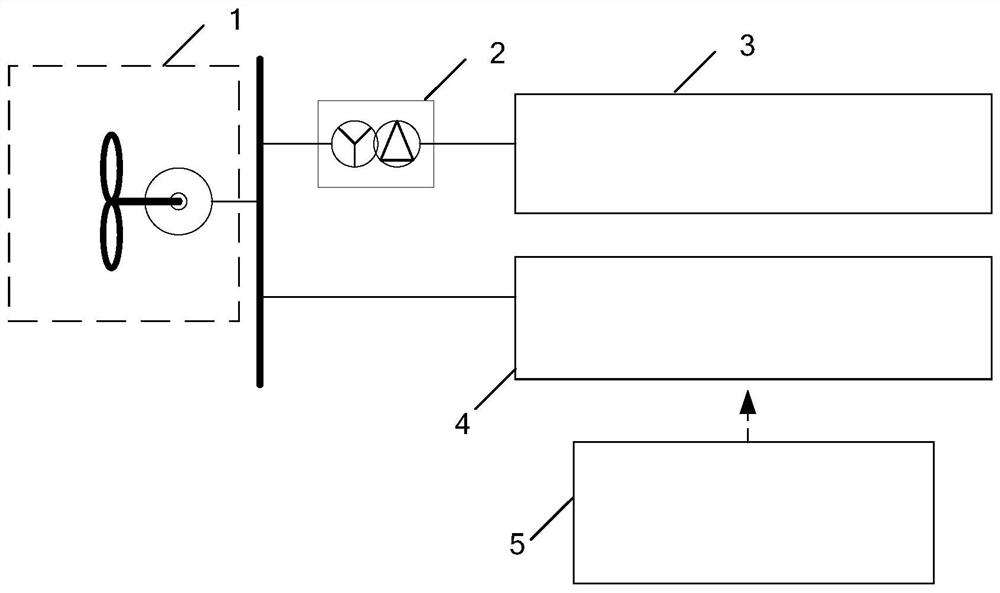
图1为本发明的离网型风力发电系统的结构框图。
图2为本实施例的主负荷为制氢设备的离网型风力发电系统的结构框图。
图3为本实施例的风电系统单相等效电路示意图。
图4为本实施例中的风速变化图。
图5为本实施例中的系统频率响应图。
图6为实施例的系统有功功率响应图。
图7为本实施例的风能利用效率图。
图8为本实施例的氢气产量图。
具体实施方式
为了使本发明的目的、技术方案和优点更加清晰明确,下面将用实施例及附图对本发明进行进一步的详细描述。应该注意的是,这里描述的实施例仅用于解释本发明,本发明的实施方式不限于此。
如图1所示,本实施例的基本结构包括风力发电机1、主负荷3、可调热负荷4、变压器2和控制装置5(鲁棒滑模控制器)。风力发电机1包括依次连接的风力机11和永磁同步发电机12;永磁同步发电机12和主负荷3、可调热负荷4均连接。本实施例还提供一种离网型风力发电系统的发电方法,基本步骤包括:
S1,风力发电机1将风能转化成电能,通过变压器2将电能输送给主负荷3和可调热负荷4;
S2,控制装置5采集风力发电机1出口母线的电压频率和风速,控制装置以控制风力发电机达到最大功率点输出为目标对电压频率和风速进行计算,生成控制信号;将控制信号发送至主负荷3和可调热负荷4;
S3,可调热负荷4根据控制信号采用机械投切电阻的方式改变可调热负荷4投入风力发电系统的容量和风力发电机的转速。
如图2所示,本实施例的具体应用形式为50kW的离网型风力发电制氢系统,风力发电机1由风力机11和永磁同步发电机12(PMSG)组成;主负荷3为制氢设备,包括不可控整流桥31、直流电容、4组DC/DC变换器32、4组滤波器33、4组电解槽堆34,每个电解槽以额定功率8.25kW 投入运行,整个制氢设备消耗的功率由激活的电解槽数量决定,通过电解槽的切换控制来实现制氢功率的变化;可调热负荷4由8组并联的三相电阻器组成,每组电阻器通过GTO进行投切,其容量以1:2
所述实施例的工作原理为,风力发电机1将风能转化成电能,以交流电的形式输送到主负荷3和二级可调热负荷4,由于主负荷3为制氢设备,所需要的直流电压比较低,所以采用降压变压器2和不可控二极管整流桥来把交流电转变成符合电压要求的直流电,再通过DC/DC变换器32调节成电解槽的额定工作电压,则实现电解槽的投入运行,如果通过DC/DC 变换器32调节成电解槽的关断电压,则可以将电解槽退出运行。主负荷3 因为有变压器2和直流环节的隔离,所以允许交流母线的输入电压和频率在一定范围内波动,对电能质量要求较低。与此同时,主负荷3的制氢功率会根据风电功率的波动进行变化,始终保持低于总的风电功率,通过改变电解槽的激活数量来实现,因此其功率呈现阶梯变化。系统的功率平衡任务由可调热负荷4来承担,其通过机械投切电阻器,来改变并入系统的容量大小,时刻维持功率的平衡。控制装置采集风速信息计算出发电机最佳转速参考值ω
所述实施例不需要投入传统风电系统中的昂贵的全控型IGBT三相整流器、全控型IGBT三相逆变器,仅仅需要一组不可控二极管整流桥和若干斩波变换器,装备简单且成本低,大大降低了电力电子设备的投资和维护成本。
如图3所示,实施例的风力发电系统单相等效电路图包含PMSG的内电动势E
实施例中的鲁棒滑模控制器5的控制规律通过以下方式计算:
其中,e为误差输入,s为滑模函数,sat(s,δ)为饱和函数,g(ω
实施例中的可调热负荷4的等效电阻可以由下式计算:
R
此外,为了保证实施例的风电系统在高风速下也能运行,投入了常规的桨距角PI控制器:K
如图4所示,实施例仿真模型中的风速变化范围是10~12.5m/s,其中在10~12m/s内系统将进行最大风能跟踪控制,12~12.5m/s内系统将进行桨距角控制,使风电功率保持在额定值。如图5所示,风电系统的实际频率能快速跟踪最佳频率,在面对风速波动、制氢功率变化带来的扰动时,具有较强的鲁棒性,超调量较小,整体控制效果良好。如图6所示,主负荷 3的制氢功率占风电功率的大部分,且呈现阶梯变化,在t
综上,本发明把系统的协调控制任务交给可调热负荷4,而不是传统 PWM驱动的整流或逆变装置来承担,减少了电力电子设备昂贵的投资成本,所设计的鲁棒滑模控制器5响应迅速、抗干扰能力强,保证了系统的稳定运行,可以很好地跟风力发电制氢系统、分布式冷热联供系统结合起来,提高偏远地区风能的利用效率。
上述仅为本发明专利的优选实施例,但该发明专利的保护范围不限于此。本发明专利还适用于主负荷3为电热锅炉或者螺杆式制冷机组的分布式冷热连供系统。在不偏离本发明实质和原则的情况下所作的其他变更、修改、替换、组合和简化,均为等效的替换方式,均在本发明的保护范围内。
- 一种离网型风力发电系统和方法
- 一种离网型风力发电系统及其最优频率跟踪控制方法