用于座椅振动消除的系统和方法
文献发布时间:2023-06-19 10:57:17
技术领域
本公开涉及座椅,并且特别地涉及用于座椅振动消除的系统和方法。
背景技术
车辆,诸如汽车、卡车、运动型多功能车辆、跨界车、小型货车、可乘坐工业设备(例如,洗地机、地面扫除器、铲车、商用剪草机等)、船只、飞机、直升机和/或其它合适的车辆,通常包括供操作员在操作车辆时坐在上面的座椅。在这类车辆的操作期间,由于作用在座椅上的各种力,操作员坐在座椅上时可能感受各种振动。
通常,这类车辆包括各种压力减少部件,这些压力减少部件适配成减少操作员上的压力,这可以允许操作员持续更长时间地操作车辆,从而得到较高的生产输出。车辆的各种压力减少部件可以包括气囊、机械缓冲装置等。车辆的各种压力减少部件可以适配成使操作员与操作车辆时感受的各种振动隔离。
发明内容
本公开大体涉及座椅振动消除。
所公开的实施例的一个方面包括一种用于消除座椅振动的系统。该系统包括与控制臂机械连通的电动机。该系统还包括处理器和存储器。存储器包括指令,该指令在由处理器执行时使处理器:从第一加速度计接收第一加速度计测量值;从第二加速度计接收第二加速度计测量值;基于第一加速度计测量值和第二加速度计测量值确定反扭矩值;并且使用反扭矩值选择性地控制电动机。
所公开的实施例的另一个方面包括一种用于消除座椅振动的方法。该方法包括接收第一加速度计测量值。该方法还包括接收第二加速度计测量值。该方法还包括基于第一加速度计测量值和第二加速度计测量值确定反扭矩值。该方法还包括使用反扭矩值选择性地控制电动机。
所公开的实施例的另一个方面包括一种车辆座椅装置。车辆座椅装置包括无刷伺服电动机和控制器。无刷伺服电动机与控制臂机械连通,控制臂从座椅顶板延伸到底座安装板。控制器配置为:从设置在座椅顶板上的第一加速度计接收第一加速度计测量值;从设置在底座安装板上的第二加速度计接收第二加速度计测量值;基于第一加速度计测量值和第二加速度计测量值确定反扭矩值;以及选择性地控制无刷伺服电动机,以使用控制臂将与反扭矩值对应的力施加到座椅顶板。
在实施例、所附权利要求书和附图的以下详细描述中公开了本公开的这些方面和其它方面。
附图说明
在结合附图阅读时,从以下详细描述很好地理解本公开。要强调的是,根据惯例,附图的各种特征未按照比例。相反,为了清楚起见,任意地扩大或缩小各种特征的尺寸。
图1大体图示了根据本公开的原理的振动消除系统。
图2大体图示了根据本公开的原理的振动消除控制器系统。
图3是大体图示了根据本公开的原理的座椅振动消除方法的流程图。
具体实施方式
以下讨论针对本发明的各种实施例。尽管这些实施例中的一个或多个可以是优选的,但是不应当将所公开的实施例解读为或以其它方式用作限制包括权利要求书的本公开的范围。另外,本领域技术人员将理解,以下描述具有广泛的应用,并且任何实施例的讨论仅仅旨在作为该实施例的示例,而不旨在暗示包括权利要求书的本公开的范围受限于该实施例。
如所描述的,车辆,诸如汽车、卡车、运动型多功能车辆、跨界车、小型货车、可乘坐工业设备(例如,洗地机、地面扫除器、铲车、商用剪草机等)、船只、飞机、直升机和/或其它合适的车辆,通常包括供操作员在操作车辆时坐在上面的座椅。在车辆的操作期间,由于作用在座椅上的各种力,操作员坐在座椅上时可能感受各种振动。例如,发动机振动和施加在车辆上的各种力,诸如由于车辆行进的路径的各种特点的那些力,可能使各种振动作用在车辆的座椅上。
通常,这类车辆包括各种压力减少部件,该压力减少部件适配为减少操作员上的压力,这可以允许操作员持续更长时间地操作车辆,从而得到较高的生产输出。车辆的各种压力减少部件可以包括气囊、机械缓冲装置等。车辆的各种压力减少部件可以适配为使操作员与操作车辆时感受的各种振动隔离。压力减少部件可以为操作员提供舒适感,并且对于操作员来说可以是振动的有效被动隔离。然而,这种典型的压力减少部件可能没有提供主动的振动消除,而且可能增加通常车辆的制造成本。
因此,可能合期望的是配置为提供被动振动消除和主动振动消除二者的系统和方法,例如本文描述的那些系统和方法。本文描述的系统和方法可以配置为感测设置在座椅附近或设置在座椅下方的车辆地板的一部分的地板加速。本文描述的系统和方法可以配置为,在振动和其它力作用于座椅上之前,确定并提供消除力给座椅的座椅顶板,以控制座椅的移动。
在一些实施例中,本文描述的系统和方法可以配置为提供操作员接口。操作员接口可以包括可选择开关(例如,诸如三位置选择器开关或其它合适的可选择开关)、数字接口开关(例如,诸如在车辆的显示器或其它合适的显示器上)或其它合适的操作员接口。在一些实施例中,本文描述的系统和方法可以配置为从操作员接口接收操作员偏好(例如,基于操作员选择)。操作员偏好可以指示优选的操作模式。操作员模式可以包括舒适模式、中等模式、稳固模式或其它合适的模式。本文描述的系统和方法可以配置为基于操作员偏好来调节提供给座椅顶板的消除力(例如,以提供由操作员选择的乘坐稳固性)。
在一些实施例中,本文描述的系统和方法可以配置为确定与车辆的座椅相关联的电动机的电动机位置和电动机速度。本文描述的系统和方法可以配置为确定要经由电动机施加至座椅的座椅顶板以减少或消除剧烈机械止动冲击的扭矩量。可以基于电动机位置和电动机速度来确定扭矩。例如,扭矩量可以包括电动机位置和电动机速度的总和,使得经由电动机将扭矩量传递至座椅顶板以便抵消座椅上的冲击。
在一些实施例中,本文描述的系统和方法可以配置为从第一加速度计接收第一加速度计测量值。本文描述的系统和方法可以配置为从第二加速度计接收第二加速度计测量值。本文描述的系统和方法可以配置为基于第一加速度计测量值和第二加速度计测量值来确定反扭矩值。本文描述的系统和方法可以配置为使用反扭矩值选择性地控制电动机。
在本文描述的系统和方法的一些实施例中,电动机可以包括无刷伺服电动机或其它合适的电动机。在本文描述的系统和方法的一些实施例中,第一加速度计设置在座椅顶板上。在本文描述的系统和方法的一些实施例中,第二加速度计设置在底座安装板上。在本文描述的系统和方法的一些实施例中,控制臂适配为在座椅顶板上施加与反扭矩值对应的力。在一些实施例中,本文描述的系统和方法可以配置为基于操作员偏好选择性地调节反扭矩值。在本文描述的系统和方法的一些实施例中,操作员偏好与操作员的期望乘坐方式对应。在一些实施例中,本文描述的系统和方法可以配置为确定电动机的电动机位置。在一些实施例中,本文描述的系统和方法可以配置为确定电动机的电动机速度。在一些实施例中,本文描述的系统和方法可以配置为基于电动机位置和电动机速度选择性地调节反扭矩值。
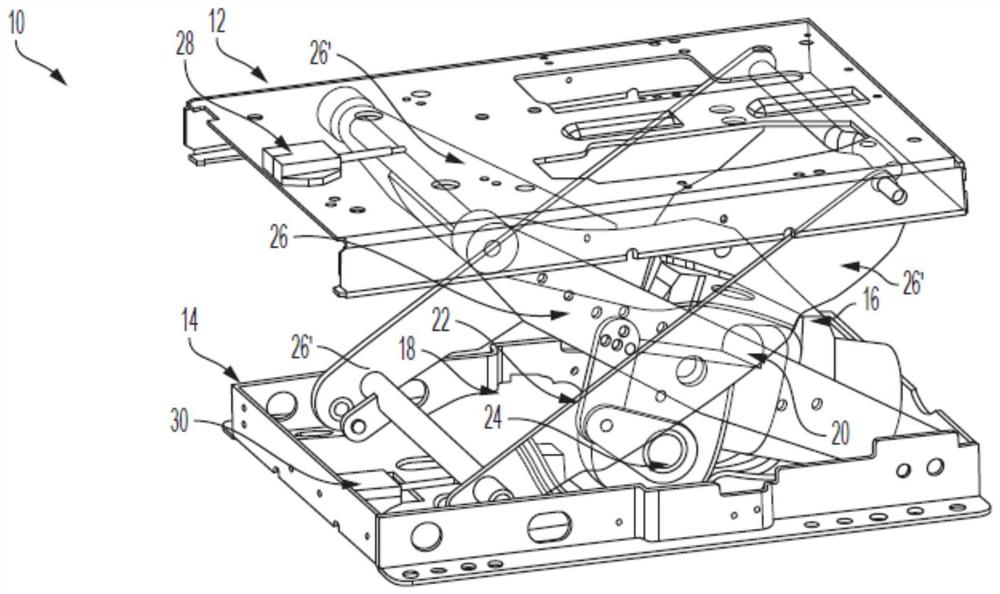
图1大体图示了根据本公开的原理的振动消除系统10。系统10可以与座椅相关联。座椅和/或系统10可以设置在车辆内,诸如本文描述的那些。系统10可以包括座椅顶板12和底座安装板14。座椅顶板12可以配置为接合座椅的底部或下部。底座安装板14可以配置为将系统10和座椅固定到车辆的地板的一部分。
系统10可以包括设置在底座安装板14上的电动机16。应当理解,电动机16可以设置在除底座安装板14之外的任何适合的位置中。电动机16可以包括任何适合的电动机。例如,电动机16可以包括无刷伺服电动机或其它适合的电动机。系统10包括控制器18。控制器18可以配置为选择性地控制电动机16。例如,如将描述到,控制器18可以配置为确定各种扭矩值。控制器18可以使用所确定的扭矩值来控制电动机16。例如,控制器18可以指令电动机16以与所确定的扭矩值对应的速度转动。电动机16可以响应于来自控制器18的指令而移动。
电动机16可以与齿轮箱20机械连通。齿轮箱20可以包括任何合适的齿轮箱,诸如蜗轮箱或其它合适的齿轮箱。当电动机16响应于来自控制器18的指令而转动时,齿轮箱20内的齿轮开动。齿轮箱20可以包括具有任何合适的齿轮比的多个齿轮。齿轮箱20可以配置为减小旋转速度,并且增加由电动机16提供的扭矩。当齿轮箱20的齿轮开动时,经由杠杆臂24连接到齿轮箱20的连杆臂22移动,这可以使升降机构26开动。
升降机构26可以包括一个或多个控制臂26’。在一些实施例中,控制臂26’可以布置成使得升降机构26包括剪刀式升降机构,然而升降机构26可以包括任何合适的升降机构。随着连杆臂22移动,升降机构26的控制臂26’在座椅顶板12上施加力。由升降机构26的控制臂26’在座椅顶板12上施加的力与由控制器18施加到电动机16的所确定的转矩对应。
在一些实施例中,系统10包括设置在座椅顶板12上的加速度计28以及设置在底座安装板14上的加速度计30。虽然仅仅描述了加速度计28和加速度计30,但是系统10可以包括任何适合数目的加速器,包括比本文描述的那些更少或更多的加速度计或传感器。加速度计28和加速度计30可以包括任何合适的加速度计。加速度计28和加速度计30可以配置为分别测量作用在座椅顶板12和底座安装板14上的加速力。
如所描述的,系统10包括控制器18。控制器18可以包括任何适合的控制器或处理器,诸如本文描述的那些。如在图2中大体图示的,控制器18可以配置为执行存储在存储器(诸如存储器32)上的指令。存储器32可以包括单个磁盘或多个磁盘(例如,硬盘驱动器),并且包括管理存储器32内的一个或多个分区的存储管理模块。在一些实施例中,存储器32可以包括闪速存储器、半导体(固态)存储器等。存储器32可以包括随机存取存储器(RAM)、只读存储器(ROM)或其组合。
存储在存储器32上的指令在由控制器18执行时使控制器18至少控制或消除操作员对作用于车辆座椅上的振动的感知。例如,控制器18从加速度计28接收第一加速度计测量值,并且从加速度计30接收第二加速度计测量值。加速度计测量值分别表示当前作用在座椅顶板12和底座安装板14上的力。控制器18可以配置为基于第一加速度计测量值和第二加速度计测量值来确定反扭矩值。反扭矩值对应于一个扭矩值,该扭矩值在控制器18使用反扭矩值控制电动机16时产生一个力,该力与作用在座椅顶板12上的振动方向相反并且大小相同或基本相同。
如所描述的,控制器18根据反扭矩值控制电动机16。当电动机16根据反扭矩值转动时,齿轮箱20的齿轮开动,从而使连杆臂22移动。控制臂26’响应于连杆臂22的移动而移动或开动,这使升降机构26施加与作用在座椅顶板12上的振动相反的力,这可以减少或消除操作员对作用在座椅顶板12上的振动的感知。
在一些实施例中,控制器18可以根据以下算法确定反扭矩值:
其中X是用于算法中的每个数学公式的输入变量,诸如加速度计测量值,并且K是针对算法中的数学公式定义的唯一可校准调谐常数。在上文中,每个变量可以是可调谐的和/或经加权的。控制器18可以基于第一加速度计测量值和第二加速度计测量值的总和来确定反扭矩值。
在一些实施例中,控制器18可以与操作员接口34通信。操作员接口34可以包括任何合适的接口。例如,操作员接口34可以包括可选择开关(例如,诸如三位置选择器开关或其它合适的可选择开关)、数字接口开关(例如,诸如在车辆的显示器上、移动设备显示器或其它适合的显示器上)或其它合适的操作员接口。控制器18可以配置为从操作员接口34接收操作员偏好。操作员偏好可以指示优选操作模式。例如,车辆的操作员可以使用操作员接口34来选择优选的或期望的操作模式。操作员模式可以包括舒适模式、中等模式、稳固模式或其它合适的模式。控制器18可以基于操作员偏好选择性地调节反扭矩值。例如,控制器18可以基于操作员偏好增加或减小反扭矩值,以提供更多或更少的振动消除(例如,通过与操作员偏好对应的振动消除来提供乘坐体验。
在一些实施例中,控制器18可以配置为基于电动机16的电动机位置和电动机速度选择性地调节反扭矩值,以便控制或消除座椅上的剧烈机械终点止动冲击(例如,通过座椅顶板12)。例如,控制器18可以确定电动机16的电动机位置。控制器18可以从设置在电动机16附近的位置传感器或其它适合的传感器接收电动机位置,并且配置为确定电动机16的电动机位置。控制器18可以确定电动机16的电动机速度。例如,控制器18可以从设置在电动机16附近的速度传感器或其它适合的传感器接收电动机速度,并且配置为确定电动机16的电动机速度。
在一些实施例中,控制器18将电动机位置转换为归一化座椅位移值,该归一化座椅位移值与从-100%到+100%的座椅范围的位移对应。控制器18确定电动机位置和电动机速度的总和。控制器18基于电动机位置和电动机速度的总和确定扭矩值和/或选择性地调节反扭矩值。控制器18使用所确定的扭矩值或经调整的反扭矩值来控制电动机16,以减少或消除座椅顶板12上的剧烈机械终点止动冲击。
在一些实施例中,控制器18继续监视加速度计测量值、电动机位置和/或电动机速度,以便提供操作员对经由座椅顶板12作用在座椅上的振动的感知的连续减少或消除。
在一些实施例中,控制器18可以执行本文描述的方法。然而,本文描述的如由控制器18执行的方法并不旨在具有限制性,并且在控制器上执行的任何类型的软件都可以执行本文描述的方法,而不脱离本公开的范围。例如,诸如在计算设备内执行软件的处理器之类的控制器可以执行本文描述的方法。
图3是大体图示了根据本公开的原理的振动消除方法300的流程图。在302处,方法300接收第一加速度计测量值。例如,控制器18可以从加速度计28和加速度计30中的一个接收第一加速度计测量值。在304处,方法300接收第二加速度计测量值。例如,控制器18可以从加速度计28和加速度计30中的另一个接收第二加速度计测量值。在306处,方法300确定反扭矩值。例如,控制器18可以基于第一加速度计测量值和第二加速度计测量值来确定反扭矩值。在一些实施例中,控制器18基于电动机16的电动机位置和电动机速度来确定反扭矩值。在一些实施例中,控制器18可以基于第一加速度计测量值和第二加速度计测量值来确定反扭矩值,并且可以基于电动机位置和电动机速度来调节反扭矩值。在一些实施例中,如所描述,控制器18接收操作员偏好。控制器18可以基于操作员偏好来调节反扭矩值或任何所确定的扭矩值。在308处,方法300使用反扭矩值控制电动机。例如,控制器18使用反扭矩值来控制电动机16。当电动机16响应于反扭矩值转动时,齿轮箱20的齿轮开动,这驱动杠杆臂24,从而使连杆臂22移动。连杆臂22的移动驱动升降机构26,升降机构26将与反扭矩值对应的力施加在座椅顶板12上。施加在座椅顶板12上的力可以减少或消除操作员对作用在座椅上的振动的感知。
在一些实施例中,用于消除座椅振动的系统包括与控制臂机械连通的电动机。该系统还包括处理器和存储器。存储器包括指令,该指令在由处理器执行时使处理器:从第一加速度计接收第一加速度计测量值;从第二加速度计接收第二加速度计测量值;基于第一加速度计测量值和第二加速度计测量值确定反扭矩值;并且使用反扭矩值选择性地控制电动机。
在一些实施例中,电动机包括无刷伺服电动机。在一些实施例中,第一加速度计设置在座椅顶板上。在一些实施例中,第二加速度计设置在底座安装板上。在一些实施例中,控制臂适配为将与反扭矩值对应的力施加在座椅顶板上。在一些实施例中,指令还使处理器基于操作员偏好而选择性地调节反扭矩值。在一些实施例中,操作员偏好与操作员的期望乘坐方式对应。在一些实施例中,指令还使处理器确定电动机的电动机位置和电动机速度,并且基于电动机位置和电动机速度选择性地调节反扭矩值。
在一些实施例中,用于消除座椅振动的方法包括接收第一加速度计测量值。该方法还包括接收第二加速度计测量值。该方法还包括基于第一加速度计测量值和第二加速度计测量值确定反扭矩值。该方法还包括使用反扭矩值选择性地控制电动机。
在一些实施例中,电动机包括无刷伺服电动机。在一些实施例中,第一加速度计测量值与座椅顶板对应。在一些实施例中,第二加速度计测量值与底座安装板对应。在一些实施例中,该方法还包括将与反扭矩值对应的力施加在座椅顶板上。在一些实施例中,该方法还包括基于操作员偏好选择性地调节反扭矩值。在一些实施例中,操作员偏好与操作员的期望乘坐方式对应。在一些实施例中,该方法还包括确定电动机的电动机位置和电动机速度,并且基于电动机位置和电动机速度选择性地调节反扭矩值。
在一些实施例中,车辆座椅装置包括无刷伺服电动机和控制器。无刷伺服电动机与控制臂机械连通,控制臂从座椅顶板延伸到底座安装板。控制器配置为:从设置在座椅顶板上的第一加速度计接收第一加速度计测量值;从设置在底座安装板上的第二加速度计接收第二加速度计测量值;基于第一加速度计测量值和第二加速度计测量值确定反扭矩值;并且选择性地控制无刷伺服电动机,以使用控制臂将与反扭矩值对应的力施加到座椅顶板。
在一些实施例中,控制器还配置为基于操作员偏好选择性地调节反扭矩值。在一些实施例中,操作员偏好与操作员的期望乘坐方式对应。在一些实施例中,控制器还配置为确定无刷伺服电动机的电动机位置和电动机速度,并且基于电动机位置和电动机速度选择性地调节反扭矩值。
上述讨论旨在说明本发明的原理和各种实施例。一旦完全理解了以上公开内容,许多变化和修改将对于本领域技术人员来说变得显而易见。应理解,以下权利要求旨在包含所有这些变化和修改。
本文使用“示例”一词来表示充当示例、例子或说明。本文中被描述为“示例”的任何方面或设计不一定要理解为比其它方面或设计更优选或更有利。而是,使用“示例”一词旨在以具体方式呈现概念。如在本申请中使用的术语“或”旨在表示包含性的“或”,而不是排他性的“或”。也就是说,除非另有说明或从上下文清楚,否则“X包括A或B”旨在表示自然包含性排列中的任一个。也就是说,如果X包括A;X包括B;或X包括A和B,则在上述情况中的任一个下均满足“X包括A或B”。另外,除非另有说明或从上下文清楚是指单数形式,否则如在本申请和所附权利要求中使用的冠词“一”和“一个”通常应当理解为“一个或多个”。此外,除非如此描述,否则全文中术语“一种实施方式”或“一个实施方式”的使用并不旨在表示相同的实施例或实施方式。
可以以硬件、软件或其任何组合来实现本文描述的系统、算法、方法、指令等。硬件可以包括例如计算机、知识产权(IP)内核、专用集成电路(ASIC)、可编程逻辑阵列、光学处理器、可编程逻辑控制器、微代码、微控制器、服务器、微处理器、数字信号处理器或任何其它合适的电路。在权利要求中,术语“处理器”应理解为单独地或组合地包括前述硬件中的任一个。可以互换地使用术语“信号”和“数据”。
如本文使用的,术语模块可以包括设计成与其它组件一起使用的封装功能硬件单元、可由控制器(例如,执行软件或固件的处理器)执行的指令集、配置为执行特定功能的处理电路、以及与更大的系统对接的独立硬件或软件组件。例如,模块可以包括专用集成电路(ASIC)、现场可编程门阵列(FPGA)、电路、数字逻辑电路、模拟电路、分立电路的组合、门和其它类型的硬件或其组合。在其它实施例中,模块可以包括存储器,该存储器存储可由控制器执行以实现模块的特征的指令。
此外,在一个方面,例如,本文描述的系统可以使用具有计算机程序的通用计算机或通用处理器来实现,该计算机程序在执行时实施本文描述的相应方法、算法和/或指令中的任一个。另外或替代地,例如,可以利用专用计算机/处理器,该专用计算机/处理器可以包含用于实施本文描述的方法、算法或指令中的任一个的其它硬件。
此外,本公开的全部或部分实施方式可以采取计算机程序产品的形式,该计算机程序产品是从例如计算机可用或计算机可读介质可访问的。计算机可用或计算机可读介质可以是任何设备,该设备例如可以有形地包含、存储、传递或传输程序,以供任何处理器使用或与任何处理器结合使用。介质可以例如是电子的、磁性的、光学的、电磁的或半导体器件。其它适合的介质也是可用的。
已经描述了上述实施例、实施方式和方面,以便允许对本发明的容易理解,并且不限制本发明。相反,本发明旨在涵盖包括在所附权利要求的范围内的各种修改和等同布置,该范围应具有最广泛的含义,以涵盖如法律允许的所有此类修改和等同结构。
- 用于座椅振动消除的系统和方法
- 用于主动振动隔离和主动振动消除的系统和方法