基于图像处理的粉末床缺陷检测方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明属于选择性激光熔化技术领域,涉及一种基于图像处理的粉末床缺陷检测方法。
背景技术
SLM(选择性激光熔化)技术是新一代零件加工方法,其原理是利用粉末在激光束的热作用下完全熔化、经冷却凝固而成型的一种新技术。该技术能快速、直接、精确地将设计思想转化为具有一定功能的实物模型。激光成形的过程包括:1)三维建模;2)切片分层;3)激光扫描烧结粉末材料;4)层层累积至零件成型。在零件成型过程中,粉末材料的铺粉质量直接影响整个零件的打印质量。
现有SLM设备的铺粉装置主要由刮刀、送粉仓及回收仓组成。具体打印过程是:刮刀将一层粉末材料平铺在已成形零件的上表面,激光光束扫描零件的截面轮廓,将本层粉末烧结,烧结层自动与下面已成形的零件粘结。当一层截面烧结完成后,工作台下降一层的厚度,刮刀继续在上面铺一层粉末材料,进行新一层截面的烧结,直至完成整个模型。应用SLM设备加工零件时,铺粉装置铺粉的精度直接影响着零件的成形质量。打印过程中,可能会出现缺粉、漏粉、铺粉表面凹凸不平整等异常情况。异常情况层层堆积,极易造成零件损坏。即使零件最终被加工成功,也会存在精度较低、内部缺陷较大等问题,不能满足客户的质量要求。
现有的SLM设备使用的铺粉检测方法使用硬件、软件配合部署的方法过于复杂,部署有一定难度,检测效果也不是很理想,难以保证铺粉精度,不能有效看护零件的成形质量。
发明内容
为了解决背景技术中存在的上述技术问题,本发明提供了一种能够快速及精准的对铺粉图像进行检测、具有较广的场景以及可有效看护零件成形质量的基于图像处理的粉末床缺陷检测方法。
为了实现上述目的,本发明采用如下技术方案:
一种基于图像处理的粉末床缺陷检测方法,其特征在于:所述基于图像处理的粉末床缺陷检测方法包括以下步骤:
1)利用相机实时采集粉末床当前层的铺粉图像;
2)对步骤1)获取得到的铺粉图像进行预处理操作,得到预处理图像;所述预处理操作包括滤波去噪处理以及灰度化处理;
3)获取预处理图像的方差加权信息熵,得到方差加权信息熵图像;
4)对方差加权信息熵图像进行二值化阈值分割,得到二值化图像;
5)对二值化图像进行形态学开运算;
6)采用区域增长的方式,对步骤5)的运算结果进行聚块处理;
7)根据聚块后的各目标块信息进行图像后处理及缺陷块标注。
上述步骤3)是根据方差加权信息熵的计算公式获取预处理图像的方差加权信息熵,所述方差加权信息熵的计算公式为:
其中,
r∈N,0≤r≤255;i∈N,0≤i≤r;
i表示图像中各像素的灰度值;
r是图像中最大像素值;p(i)表示第i级灰度像素在图像中出现的概率。
上述步骤1)的具体实现方式是:
1.1)通过相机实时拍摄粉末床当前层的图像;
1.2)对该图像进行四点定位操作获取粉末床真正的工作区域;
1.3)根据粉末床真正的工作区域获取粉末床当前层的铺粉图像。
上述步骤2)的具体实现方式是:
2.1)对粉末床当前层的铺粉图像的边缘进行裁剪;
2.2)对裁剪后的图像进行高斯滤波,去除图像中随机噪声,使图像更加平滑;
2.3)对平滑后的图像进行灰度化处理。
上述步骤4)的具体实现方式是对方差加权信息熵图像进行二值化阈值分割;其中二值化阈值分割中所采用的阈值选取由方差加权信息熵图像最大值确定;设分割阈值为此图像最大值的α倍。
上述步骤6)的具体实现方式是:
6.1)分别申请变量Labelndex和全0矩阵Map,Labelndex用于标识被识别到的目标块索引,Map与二值图像大小完全相同,用于记录每个像素点是否被搜索过;
6.2)开始逐像素遍历二值图像,寻找满足条件A的像素点;所述条件A是二值图像像素值为255,且Map矩阵对应像素值为0;当发现第一个满足条件A的像素点时,目标块索引Labelndex加1,将Map对应像素值置为Labelndex,同时将该点作为种子点,在二值图像中寻找该种子点的4连通区域是否存在满足条件A的像素点,若存在,将满足条件的像素点顺序存入临时容器,依次将临时容器中的像素点作为种子,继续判断每个种子点的4连通区域是否出现满足条件A的像素点;如此循环搜索,直至遍历完二值图像的所有像素;
6.3)统计矩阵Map中标记信息;经过步骤6.2,Map矩阵中存放了所有像素点被识别为某个目标块的信息,通过遍历Map矩阵,即得到二值图像中所有目标块的长宽信息及目标块所占像素个数;
6.4)根据每个目标块所占像素个数进行降序排列,同时对目标块过小的区域进行过滤,剔除孤立噪点的干扰。
上述步骤7)的具体实现方式是:
根据聚块后的各目标块信息,计算每个目标块的宽高比和目标块所包含的像素点数占其外接矩形的占比,设定阈值TH1和TH2,删除宽高比大于TH1的目标块和白色像素占比小于TH2的目标块,剩余目标块即为算法检测到的缺陷块信息;根据各缺陷块位置信息,用矩形框标注,并在原始图像中显示标注信息,即得到最终检测结果。
本发明的优点是:
本发明提供了一种基于图像处理的粉末床缺陷检测方法,首先通过摄像头采集粉末床的当前层铺粉图像,利用四点定位工具对图像裁剪,以获取粉末床的实际成型区域。接着对裁剪图像进行图像预处理,以去除实际成像过程中的噪点和孤立支撑。考虑某些场景的粉末缺陷特征不明显,引入方差加权信息熵方法,对铺粉图进行图像增强,增强后的图像使背景和缺陷更容易区分。接着对增强图像进行阈值分割、区域增长聚块等方式,获取每个独立缺陷区域在图像中的实际位置。最后对所有缺陷块进行筛选,过滤掉被错误分割的虚假缺陷块,将真正缺陷位置标识在粉末床的原始铺粉图像上,并根据标记结果判断是否需要重新铺粉,以此完成对整个粉末床的缺陷检测。本发明是一种基于图像处理的粉末床缺陷检测方法,解决了现有铺粉检测方法原理复杂、部署成本高、铺粉检测效果差、适用场景窄、难以有效看护零件成形质量的问题。算法原理简单、容易部署、铺粉检测效果好、适用场景广、算法运行稳定、可有效检测出常见铺粉缺陷,有效看护零件成形质量。
附图说明
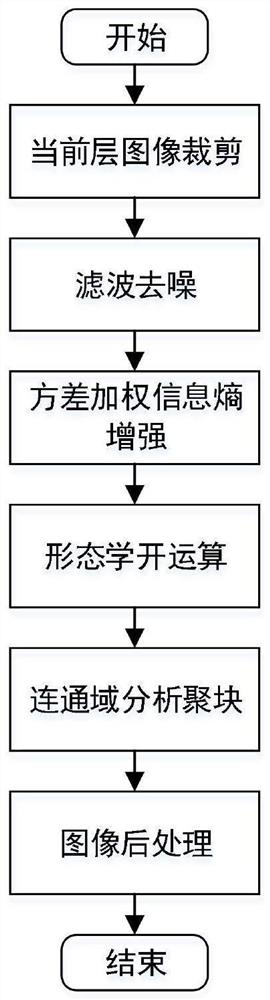
图1是本发明所提供的基于图像处理的粉末床缺陷检测方法的流程图;
图2是粉末床原始铺粉图;
图3是滤波后铺粉图;
图4是方差加权信息熵增强图;
图5是阈值分割图;
图6是缺陷检测结果图。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
参见图1,本发明一种基于图像处理的粉末床缺陷检测方法,包括以下具体步骤:
步骤1,利用相机实时采集粉末床当前层的铺粉图像(参见图2),对该图像进行四点定位操作,获取粉末床真正的工作区域,该操作不仅消除了相机畸变,还对粉末床区域进行了裁剪及透视变换,降低了后续检测的虚检率。此处的四点定位是对图像进行了透视变换处理,由于该技术已被成熟应用,这里不再详细描述。
步骤2,对步骤1所获得的铺粉图进行图像预处理操作,包括滤波去噪、灰度化等步骤。
步骤2.1,对边缘裁剪后图像进行高斯滤波,去除图像中随机噪声,使图像更加平滑。此处高斯核可根据图像质量进行选取,若噪声过多,可适当增大高斯核进行滤波。
步骤2.2,平滑后图像进行灰度化,最终得到的图像参见图3。
步骤3,获取预处理图像的方差加权信息熵,最终得到的图像参见图4。方差加权信息熵的计算公式为:
其中,r∈N,0≤r≤255;i∈N,0≤i≤r,r是图像中最大像素值,p(i)表示第i级灰度像素在图像中出现的概率;i表示图像中各像素的灰度值;
步骤4,二值化图像。对方差加权信息熵图像进行二值化阈值分割(参见图5),此处阈值选取由方差加权信息熵图像最大值确定。可设分割阈值为此图像最大值的α倍,该参数可根据实际检测场景进行多次测试得出,一般取0.7~0.9均能满足大多数场景。
步骤5,形态学开运算。为避免复杂场景中二值图像的噪点对后续目标聚块带来不利影响,通过形态学开操作,可消除这些孤立噪声、分割出独立的图形元素,使目标聚块更加容易,同时降低误检率。
步骤6,连通域分析进行聚块。采用区域增长的方式,对步骤6结果图中白色像素进行标记,使各连通域形成被标识的块,进一步获取每个独立区域的最大外接矩形。具体操作步骤如下:
步骤6.1,分别申请变量Labelndex和全0矩阵Map,Labelndex用于标识被识别到的目标块索引,Map与二值图像大小完全相同,用于记录每个像素点是否被搜索过;
步骤6.2,开始逐像素遍历二值图像,寻找满足条件A“二值图像像素值为255,且Map矩阵对应像素值为0”的像素点。此时要对图像中的目标物聚块,感兴趣的目标表现在二值图像中就是像素值等于255,所以需要寻找二值图像中像素值等于255的像素点。Map矩阵的作用是用于记录各像素点是否被搜索过,若其像素值为1,则代表该点已被处理过,所以寻找Map矩阵中为0的没有被聚块处理的像素点。想要在图像中将目标物聚块,需要满足二值图像像素值等于255,同时Map矩阵中对应像素值等于0的条件,才能获得最终的目标块信息。
当发现第一个满足条件A的像素点时,目标块索引Labelndex加1,将Map对应像素值置为Labelndex,同时将该点作为种子点,在二值图像中寻找该种子点的4连通区域是否存在满足条件A的像素点,若存在,将满足条件的像素点顺序存入临时容器,依次将临时容器中的像素点作为种子,继续判断每个种子点的4连通区域是否出现满足条件A的像素点。如此循环搜索,直至遍历完二值图像的所有像素。
步骤6.3,统计矩阵Map中标记信息。经过步骤6.2,Map矩阵中存放了所有像素点被识别为某个目标块的信息,通过遍历Map矩阵,即可得到二值图像中所有目标块的长宽信息及目标块所占像素个数。
步骤6.4,根据每个目标块所占像素个数进行降序排列,同时对目标块过小(比如可以设定目标块所占像素数小于10)的区域进行过滤,剔除孤立噪点的干扰。
步骤7,图像后处理及缺陷块标注。根据聚块后的各目标块信息,计算每个目标块的宽高比和目标块所包含的像素点数占其外接矩形的占比,设定阈值TH1和TH2,删除宽高比大于TH1的目标块和白色像素占比小于TH2的目标块,剩余目标块即为算法检测到的缺陷块信息。根据各缺陷块位置信息,用矩形框标注,并在原始图像中显示标注信息,即得到最终检测结果(参见图6)。
- 基于图像处理的粉末床缺陷检测方法
- 基于图像处理的织物表面缺陷检测方法和系统