毫米波雷达的道路场景测试设备及其方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及一种雷达探测领域,尤其涉及一种毫米波雷达的道路场景测试设 备及其方法。
背景技术
雷达最开始起源于军用,最近这些年不断向民用、工业用领域进行扩展。雷 达的原理是利用无线电的方法发现目标并测定它们的空间位置,现今常用于监 视、搜索、探测、导航、汽车、距离测量、军事、飞机、气象等领域。并且,近 几年由于自驾车和无人机的蓬勃发展,其中雷达用来作为辅助系统已成为不可或 缺的感测器之一。特别地,毫米波雷达在自动驾驶领域中的运用。
进一步地说,毫米波雷达具有体积小、重量轻、不易受天候因素影响和探测 距离长等优点。因此,在汽车领域中毫米波雷达被广泛应用于盲区侦测报警系统 (BSD)、后方车侧交通辅助系统(RCTA)、停车开门报警系统(DOW)、变换车道辅助 (LCA)、后碰预警(RCW)等。换言之,在毫米波雷达交付至客户端时,需进行 道路场景的测试,已证毫米波雷达的功能(如BSD、LCA、DOW、RCTA、RCW等) 是否满足客户需求。例如,测试LCA变道辅助功能,自车以接近50km/h的速度 行驶,目标车以120km/h的速度从相邻车道,从自车后方100m的位置超车,TTC 碰撞时间定义为3.5s,那么LCA功能应在目标车相距68m的位置开始报警,持 续至超过自车。目前,怎么判读目标车的报警位置成为道路场景测试的难题。现 成,有些雷达厂家会在道路场景测试时,增加一个激光雷达,以激光雷达作为一 真值,与毫米波雷达的一量测值进行对比。但是该方案受限于激光雷达的准确性, 当激光雷达测量到是多目标时,还需要甄别哪一个目标是测试车。所以一般会将 整个测试过程的数据记录下来,通过回放人工判读。然而,由于道路场景测试项 目众多,加上数据大,往往要花费大量的时间和人力。如何减少毫米波雷达的道 路场景的测试所浪费大量时间和人力是目前迫切需解决的问题。
发明内容
本发明的一个优势在于其提供一种毫米波雷达的道路场景测试设备及其方 法,以减少毫米波雷达在道路场景测试所浪费大量时间和人力。
本发明的一个优势在于其提供一种毫米波雷达的道路场景测试设备及其方 法,其中采用高精度组合导航系统替代激光雷达测试的方案,以达到精确快速地 确认毫米波雷达是满足预设需求的。进一步地说,高精度组合导航定位精度在厘 米级,数据刷新率100Hz,性能和实时性都能满足道路场景测试的需求。
本发明的一个优势在于其提供一种毫米波雷达的道路场景测试设备及其方 法,其中所述道路场景测试设备采用高精度导航定位出一目标车的相对位置、速 度、姿态,以作为判读标准,并经由一上位机软件对所述毫米波雷达解算出来的 位置和报警信息与判读标准进行比较,以在线实时判读出测试结果,极大提升所 述毫米波雷达的道路场景测试的效率。
本发明的一个优势在于其提供一种毫米波雷达的道路场景测试设备及其方 法,其中使用高精度导航定位进行对所述毫米波雷达的道路场景测试,从而实现 测试结果的实时判读,以达到省时和正确性。
本发明的另一优势在于其提供一种适于,其中该不需要精密的部件和复杂的 结构,其制造工艺简单,成本低廉。
本发明的其它优势和特点通过下述的详细说明得以充分体现并可通过所附 权利要求中特地指出的手段和装置的组合得以实现。
依本发明,能够实现前述目的和其他目的和优势的本发明的一毫米波雷达的 道路场景测试设备及其方法,包括:
一目标组合导航模组,其接收一目标卫星定位信号,一目标地面信号和一目 标惯性信号,并计算出一目标车的一目标实时位置信息;
一测试组合导航模组,其接收一测试卫星定位信号,一测试地面信号和一测 试惯性信号,并计算出一测试车的一测试实时位置信息;以及
一工控机,其接收所述目标实时位置信息和所述测试实时位置信息并得出道 路场景测试的一真值,并接收一毫米波雷达的一输出值,其中比较所述真值与所 述输出值,以确保所述毫米波雷达达到一预设需求。
本发明的一实施例中,所述毫米波雷达的道路场景测试设备包括一目标无线 数据模块和一测试无线数据模块,其中所述目标实时位置信息经由所述目标无线 数据模块传送到所述测试无线数据模块,所述工控机经由所述测试无线数据模块 接收所述目标实时位置信息。
本发明的一实施例中,所述目标组合导航模组包括一目标天线,一目标通讯 终端,一目标组合导航定位终端,其中所述目标组合导航定位终端分别连接所述 目标天线,所述目标通讯终端和所述目标无线数据模块。
本发明的一实施例中,所述目标天线从一卫星接收所述目标卫星定位信号, 所述目标通讯终端从一地面基站接收所述目标地面信号,所述目标组合导航定位 终端从所述目标车的一目标组合惯性模块接收所述目标惯性信号。
本发明的一实施例中,所述测试组合导航模组包括一测试天线,一测试通讯 终端,一测试组合导航定位终端,其中所述测试组合导航定位终端分别连接所述 测试天线,所述测试通讯终端和所述工控机。
本发明的一实施例中,所述测试天线从一卫星接收所述测试卫星定位信号, 所述测试通讯终端从一地面基站接收所述测试地面信号,所述测试组合导航定位 终端从所述测试车的一测试组合惯性模块接收所述测试惯性信号。
本发明的一实施例中,所述测试组合导航模组的测试组合导航定位终端将所 述测试卫星定位信号、所述测试地面信号和所述测试惯性信号整合计算出精度在 厘米级的所述测试车的所述测试实时位置信息。
本发明的一实施例中,所述工控机的一上位机软件结合所述目标车的所述目 标实时位置信息和所述测试车的所述测试实时位置信息得出所述目标车在所述 测试车的雷达坐标系的一坐标信息。
本发明的一实施例中,所述工控机还包括一记录模块,以记录道路场景测试 的数据,便于回放整个测试过程。
依本发明,能够实现前述目的和其他目的和优势的本发明的一毫米波雷达的 道路场景测试方法,包括步骤如下:
(A)一目标组合导航模组分别接收一目标卫星定位信号,一目标地面信号和 一目标惯性信号,并计算出一目标车的一目标实时位置信息;
(B)一测试组合导航模组分别接收一测试卫星定位信号,一测试地面信号和 一测试惯性信号,并计算出一测试车的一测试实时位置信息;
(C)一工控机接收所述目标实时位置信息和所述测试实时位置信息并得出 道路场景测试的一真值;以及
(D)所述工控机接收一毫米波雷达的一输出值,并比较所述真值与所述输出 值,以确保所述毫米波雷达达到一预设需求。
本发明的一实施方法中,在步骤(A)中,所述目标组合导航模组的所述目标 天线接收一卫星发射所述目标卫星定位信号,所述目标组合导航模组的所述目标 通讯终端接收一地面基站发射所述目标地面信号,所述目标组合导航模组的所述 目标组合导航定位终端接收所述目标车的一目标组合惯性模块产生所述目标惯 性信号。
本发明的一实施方法中,在步骤(B)中,所述测试组合导航模组的所述测试 天线接收一卫星发射所述测试卫星定位信号,所述测试组合导航模组的所述测试 通讯终端接收一地面基站发射所述测试地面信号,所述测试组合导航模组的所述 测试组合导航定位终端接收所述测试车的一测试组合惯性模块产生所述测试惯 性信号。
本发明的一实施方法中,还包括步骤(E),一记录模块记录所述目标实时位 置信息、所述测试实时位置信息、所述坐标信息、所述真值以及所述输出值,便 于回放整个测试过程。
通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体 现。
本发明的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利 要求得以充分体现。
附图说明
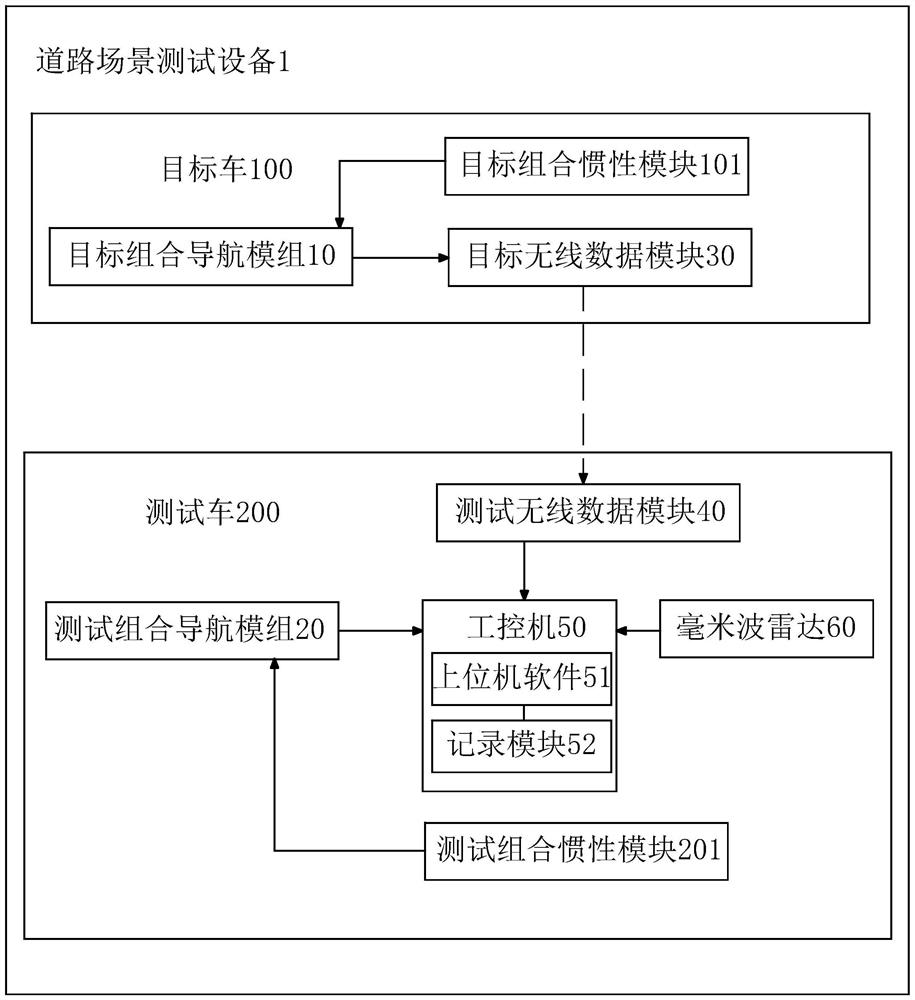
图1至图3是根据本发明的第一优选实施例的一毫米波雷达的道路场景测试 设备的逻辑示意图。
图4是根据本发明的第一优选实施例的第一变形实施例的一毫米波雷达的道 路场景测试设备的逻辑示意图。
图5是根据本发明的第一优选实施例的第二变形实施例的一毫米波雷达的道 路场景测试设备的逻辑示意图。
图6是根据本发明的优选实施例的一毫米波雷达的道路场景测试方法的流程 示意图。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中 的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以 下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方 案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、 “上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、 “底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置 关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或 元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为 对本发明的限制。
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一 个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量 可以为多个,术语“一”不能理解为对数量的限制。
如图1所示至图3所示,是根据本发明的第一优选实施例的一毫米波雷达的 道路场景测试设备及其方法,以减少一毫米波雷达60在道路场景测试所浪费大 量时间和人力的问题。进一步地说,本发明利用定位精度在厘米级的高精度组合 导航进行测试,其中高精度组合导航的性能和实时性都能满足道路场景测试的需 求,以完成对所述毫米波雷达60的道路场景测试,通过这样的设备和方式将减 少时间和人力的浪费。本发明的所述道路场景测试设备1适用于两车辆,以确保 所述毫米波雷达60达到一预设需求。进一步地说,通过所述道路场景测试设备 1获得一真值,并使其与所述毫米波雷达60的一输出值进行比较,以确认所述 毫米波雷达60的所述输出值是否达到所述预设需求。
在本发明的实施例中,所述道路场景测试设备1包括一目标组合导航模组10, 一测试组合导航模组20,一目标无线数据模块30,一测试无线数据模块40,一 工控机50,以及一所述毫米波雷达60。所述目标组合导航模组10连接所述目标 无线数据模块30,并分别设置于一目标车100。所述工控机50分别连接所述测 试组合导航模组20、所述测试无线数据模块40和所述毫米波雷达60并分别设 置于一测试车200。值得一提的是,本发明所提之连接可为无线连接或有线连接, 以实际应用为主,这不为本发明的限制。
在本发明的实施例中,所述目标组合导航模组10接收一目标卫星定位信号, 一目标地面信号和一目标惯性信号,其中所述目标组合导航模组10将三信号整 合计算出所述目标车100的一目标实时位置信息。接着,经由所述目标无线数据 模块30将所述目标实时位置信息传送到所述测试无线数据模块40,且经由所述 测试无线数据模块40将所述目标实时位置信息传送到所述工控机50。所述测试 组合导航模组20接收一测试卫星定位信号,一测试地面信号和一测试惯性信号, 其中所述测试组合导航模组20将三信号整合计算出所述测试车200的一测试实 时位置信息。接着,所述测试组合导航模组20将所述测试实时位置信息传送到 所述工控机50。然后,所述工控机50依所述目标实时位置信息和所述测试实时 位置信息得出作为道路场景测试的所述真值。所述工控机50将所述真值与所述 毫米波雷达60的所述输出值进行比较,以确认所述毫米波雷达60是否达到所述 预设需求。
进一步地说,一卫星900发射所述目标卫星定位信号到所述目标组合导航模 组10。一地面基站800发射所述目标地面信号到所述目标组合导航模组10。所 述目标车100的一目标组合惯性模块101产生所述目标惯性信号到所述目标组合 导航模组10。所述目标组合导航模组10将所述目标卫星定位信号、所述目标地 面信号和所述目标惯性信号整合计算出精度在厘米级的所述目标车100的所述 目标实时位置信息。然后,通过所述目标车100上的所述目标无线数据模块30 将所述目标车100的所述目标实时位置信息发送给所述测试车200上的所述测试 无线数据模块40。另外,所述卫星900发射所述测试卫星定位信号到所述测试 组合导航模组20。所述地面基站800发射所述测试地面信号到所述测试组合导航模组20。所述测试车200的一测试组合惯性模块201产生所述测试惯性信号 到所述测试组合导航模组20。所述测试组合导航模组20将所述测试卫星定位信 号、所述测试地面信号和所述测试惯性信号整合计算出精度在厘米级的所述测试 车200的所述测试实时位置信息。所述工控机50的一上位机软件51结合所述目 标车100的所述目标实时位置信息和所述测试车200的所述测试实时位置信息得 出所述目标车100在所述测试车200的雷达坐标系的一坐标信息,其包括位置、 姿态、速度等,并且在已知两车轮廓下,所述坐标信息为道路场景测试的所述真 值。所述工控机50的所述上位机软件51将所述真值与所述毫米波雷达60的所 述输出值进行比较,并实时显示、实时判读,以提升所述毫米波雷达60的道路 场景测试效率。并且,判断出所述毫米波雷达60是否达到所述预设需求。
另外,所述工控机50还包括一记录模块52,以记录道路场景测试的数据, 便于回放整个测试过程。进一步地,所述记录模块52记录所述目标实时位置信 息、所述测试实时位置信息、所述坐标信息、所述真值以及所述输出值等各数据, 这样,对于测试过程中出现的问题也可以快速准确定位。
在本发明的实施例中,所述目标组合导航模组10包括一目标天线11,一目 标通讯终端12,一目标组合导航定位终端13。所述目标天线11和所述目标通讯 终端12分别连接所述目标组合导航定位终端13。所述目标组合导航定位终端13 连接所述目标无线数据模块30。所述测试组合导航模组20包括一测试天线21, 一测试通讯终端22,一测试组合导航定位终端23。所述测试天线21和所述测试 通讯终端22分别连接所述测试组合导航定位终端23。所述测试组合导航定位终 端23连接所述工控机50。值得一提的是,本发明所提之连接可为无线连接或有 线连接,以实际应用为主,这不为本发明的限制。
进一步地说,所述卫星900发射所述目标卫星定位信号到所述目标组合导航 模组10的所述目标天线11。所述地面基站800发射所述目标地面信号到所述目 标组合导航模组10的所述目标通讯终端12。所述目标车100的一目标组合惯性 模块101产生所述目标惯性信号到所述目标组合导航模组10的所述目标组合导 航定位终端13。所述目标组合导航模组10的所述目标组合导航定位终端13将 所述目标卫星定位信号、所述目标地面信号和所述目标惯性信号整合计算出精度 在厘米级的所述目标车100的所述目标实时位置信息。然后,通过所述目标车 100上的所述目标无线数据模块30将所述目标车100的所述目标实时位置信息 发送给所述测试车200上的所述测试无线数据模块40。
另外,所述卫星900发射所述测试卫星定位信号到所述测试组合导航模组20 的所述测试天线21。所述地面基站800发射所述测试地面信号到所述测试组合 导航模组20的所述测试通讯终端22。所述测试车200的一测试组合惯性模块201 产生所述测试惯性信号到所述测试组合导航模组20的测试组合导航定位终端 23。所述测试组合导航模组20的测试组合导航定位终端23将所述测试卫星定位 信号、所述测试地面信号和所述测试惯性信号整合计算出精度在厘米级的所述测 试车200的所述测试实时位置信息。所述工控机50的所述上位机软件51分别接 收所述目标车100的所述目标实时位置信息和所述测试车200的所述测试实时位 置信息,并计算得出所述目标车100在所述测试车200的雷达坐标系的所述坐标 信息,其中所述坐标信息为道路场景测试的所述真值。可以理解的,设置于所述 测试车200的所述毫米波雷达60在车子行进同时侦测并产生所述输出值至所述 工控机50的所述上位机软件51。因此,所述工控机50的所述上位机软件51将 所述真值与所述输出值进行比较,以确认所述毫米波雷达60的所述输出值是否 达到所述预设需求。也就是说,本发明利用高精度的导航定位出所述目标车100 的相对位置、速度、姿态,准确唯一,以作为判读标准,并通过所述上位机软件 51对所述毫米波雷达60解算出来的位置和报警信息与判读标准进行比较,以在 线实时判读出测试结果,极大提升道路场景测试的效率。
如图4所示,是根据本发明的第一优选实施例的第一变形实施例,其中所述 毫米波雷达60不包括在所述道路场景测试设备1中。也就是说,所述毫米波雷 达60另外独立设置于所述测试车200上,并将所述毫米波雷达60侦测的讯息形 成所述输出值传送到所述工控机50的所述上位机软件51,以与所述真值进行比 较。可以理解的,本变形实施例与第一优选实施例的内容大致相同,因此不在此 加以赘述。
值得一提的,如图5所示,是根据本发明的第一优选实施例的第二变形实施 例,其中所述目标无线数据模块30可以实施为所述目标车100的内含装置。所 述测试无线数据模块40和所述工控机50亦可以实施为所述测试车200的内含装 置。以降低所述道路场景测试设备1的成本。也就是说,所述目标车100若原本 即设有所述目标无线数据模块30,那么所述目标组合导航模组10可以直接连接 所述目标车100的所述目标无线数据模块30,而所述道路场景测试设备1不用 另外设置所述目标无线数据模块30于所述目标车100,以降低成本并简化设备 结构。同理,当所述测试车200原本即设有所述测试无线数据模块40和所述工 控机50,其中所述测试无线数据模块40连接所述工控机50,那么所述测试组合 导航模组20可以直接连接所述测试车200的述工控机50,而所述道路场景测试 设备1不用另外设置所述测试无线数据模块40和所述工控机50于所述测试车 200。
如图6所示,是根据本发明的一优选实施例的一毫米波雷达的道路场景测试 设备及其方法,包括步骤如下:
(A)一目标组合导航模组10分别接收一目标卫星定位信号,一目标地面信 号和一目标惯性信号,并计算出一目标车100的一目标实时位置信息;
(B)一测试组合导航模组20分别接收一测试卫星定位信号,一测试地面信 号和一测试惯性信号,并计算出一测试车200的一测试实时位置信息;
(C)一工控机50接收所述目标实时位置信息和所述测试实时位置信息并得 出道路场景测试的一真值;以及
(D)所述工控机50接收一毫米波雷达60的一输出值,并比较所述真值与所 述输出值,以确保所述毫米波雷达达到一预设需求。
根据步骤(A),所述目标组合导航模组10的所述目标天线11接收一卫星900 发射所述目标卫星定位信号。所述目标组合导航模组10的所述目标通讯终端12 接收一地面基站800发射所述目标地面信号。所述目标组合导航模组10的所述 目标组合导航定位终端13接收所述目标车100的一目标组合惯性模块101产生 所述目标惯性信号。
根据步骤(A),所述目标组合导航定位终端13将所述目标卫星定位信号、所 述目标地面信号和所述目标惯性信号整合计算出精度在厘米级的所述目标车100 的所述目标实时位置信息。
根据步骤(B),所述测试组合导航模组20的所述测试天线21接收所述卫星 900发射所述测试卫星定位信号。所述测试组合导航模组20的所述测试通讯终 端22接收所述地面基站800发射所述测试地面信号。所述测试组合导航模组20 的所述测试组合导航定位终端23接收所述测试车200的一测试组合惯性模块201 产生所述测试惯性信号。
根据步骤(B),所述测试组合导航定位终端23将所述测试卫星定位信号、所 述测试地面信号和所述测试惯性信号整合计算出精度在厘米级的所述测试车200 的所述测试实时位置信息。
根据步骤(C),所述目标无线数据模块30将所述目标实时位置信息传送到所 述测试无线数据模块40,且经由所述测试无线数据模块40将所述目标实时位置 信息传送到所述工控机50。
上述方法还包括步骤(E),一记录模块52记录所述目标实时位置信息、所述 测试实时位置信息、所述坐标信息、所述真值以及所述输出值,便于回放整个测 试过程。
本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为 举例而并不限制本发明。
本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例 中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修 改。
- 毫米波雷达的道路场景测试设备及其方法
- 应用于随机干扰场景下的毫米波雷达动态手势识别方法