清洁装置和数据采集装置
文献发布时间:2023-06-19 11:17:41
技术领域
本公开涉及智能交通领域,具体地,涉及数据采集技术领域,尤其是激光雷达技术领域,更涉及一种清洁装置。
背景技术
在诸多场景中需要通过数据采集装置来采集相关数据,数据采集装置例如包括传感器或相机。由于户外环境复杂,在使用数据采集装置的过程中,如果数据采集装置的感知区域被雨水、灰尘、泥斑、油污等覆盖,容易造成数据采集装置的感知能力下降,甚至失效。为了保证数据采集装置的采集效果,因此需要对数据采集装置进行清洁。
发明内容
本公开提供了一种清洁装置和数据采集装置。
根据本公开的一方面,提供了一种清洁装置,包括:底座、清洁部件、第一驱动部件和第二驱动部件。其中,第一驱动部件与所述底座和所述清洁部件连接,所述第一驱动部件被配置为驱动所述清洁部件以第一方式运动。第二驱动部件与所述清洁部件连接,所述第二驱动部件被配置为驱动所述清洁部件以第二方式运动,所述第二方式与所述第一方式不同。
根据本公开的另一方面,提供了一种数据采集装置,所述数据采集装置包括传感器和清洁装置,所述传感器例如设置于所述清洁装置的底座。
应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
附图用于更好地理解本方案,不构成对本公开的限定。其中:
图1示意性示出了根据本公开一实施例的清洁装置的结构图;
图2示意性示出了根据本公开另一实施例的清洁装置的结构图;
图3示意性示出了根据本公开另一实施例的清洁装置的结构图;
图4示意性示出了根据本公开另一实施例的清洁装置的结构图;以及
图5示意性示出了根据本公开另一实施例的清洁装置的结构图。
具体实施方式
以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本公开。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
本公开的实施例提供了一种清洁装置,包括:底座、清洁部件、第一驱动部件和第二驱动部件。其中,第一驱动部件与底座和清洁部件连接,第一驱动部件被配置为驱动清洁部件以第一方式运动。第二驱动部件与清洁部件连接,第二驱动部件被配置为驱动清洁部件以第二方式运动,第二方式与第一方式不同。
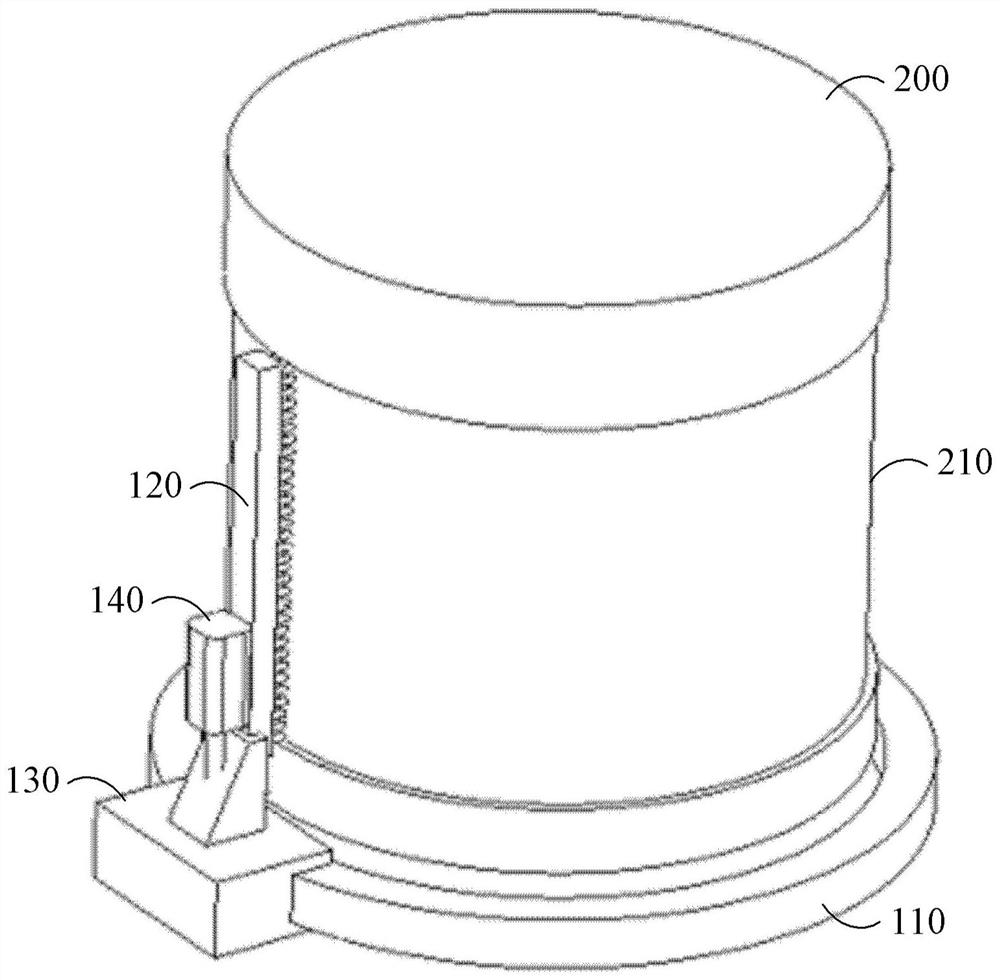
图1示意性示出了根据本公开一实施例的清洁装置的结构图。
如图1所示,本公开实施例的清洁装置例如可以包括底座110、清洁部件120、第一驱动部件130和第二驱动部件140。
例如,第一驱动部件130与底座110和清洁部件120连接。示例性地,第一驱动部件130包括第一端和第二端,第一端和底座110连接,第二端和清洁部件120连接。第一驱动部件130可以通过电机与齿轮的组合方式来驱动清洁部件120运动,或者还可以通过气压或液压的方式来驱动清洁部件120运动。第二驱动部件140例如与清洁部件120连接,第二驱动部件140可以通过电机、气压、液压等方式来驱动清洁部件120运动。
第一驱动部件130被配置为驱动清洁部件120以第一方式运动,例如第一驱动部件130驱动清洁部件120相对于底座110运动。第二驱动部件140被配置为驱动清洁部件120以第二方式运动,例如驱动清洁部件120进行小范围的运动。
例如,第二方式与第一方式不同。在一示例中,第一方式例如可以是平移或转动,第二方式例如可以是振动。其中,第一驱动部件130和第二驱动部件140可以同时运动,即,清洁装置在通过平移或转动来进行清洁作业时,还可以同时通过振动的方式来进一步提高清洁的效果。
示例性地,清洁装置可以用于清洁传感器200。传感器200具有外表面210。第一驱动部件130通过驱动清洁部件120贴合外表面210运动,以清洁外表面210。第二驱动部件140例如驱动清洁部件120在当前位置来回振动,以清洁传感器200的外表面210。另外,通过第二驱动部件140驱动清洁部件120振动,以通过振动去除吸附在清洁部件120上的灰尘或砂石,防止灰尘或砂石对传感器200的外表面造成磨损,同时也保证清洁部件120自身的清洁性,以提高清洁效果。可见,本公开的实施例通过第一驱动部件130和第二驱动部件140相互配合使用,提高了清洁效果,也对传感器起到保护作用。
以下将结合图2至图5对本公开的不同实施例进行说明。
图2示意性示出了根据本公开另一实施例的清洁装置的结构图。
如图2所示,清洁装置的底座110例如为环形底座,清洁部件120例如为条形清洁部件。
条形清洁部件例如设置于环形底座的一侧,环形底座例如套接于传感器200。其中,第一驱动部件130被配置为驱动条形清洁部件沿着方向A运动,沿着方向A运动例如为沿着环形底座的周向相对于环形底座运动。例如,第一驱动部件130驱动条形清洁部件沿着方向A平移至位置P
条形清洁部件例如包括条形支撑件121和第一刷毛122。条形支撑件121与第一驱动部件130连接,第一刷毛122与条形支撑件121连接。条形支撑件121与环形底座的轴线II’之间的距离为第一距离L
条形清洁部件与环形底座所在平面之间的夹角为第一预设夹角α
如图2所示,第二驱动部件140例如可以驱动条形清洁部件振动,振动方向可以是任意方向。例如为以条形清洁部件的当前位置为起点,驱动条形清洁部件在周围小幅度地来回振动。
如图2所示,清洁装置还可以包括连杆结构150。连杆结构150例如包括第一端部和第二端部,第一端部和条形清洁部件连接,第二端部例如与第一驱动部件130连接。第一驱动部件130驱动连杆结构150运动,由连杆结构150带动条形清洁部件运动。
第二驱动部件140例如与连杆结构150连接,例如第二驱动部件140固定于连杆结构150。
根据本公开的实施例,通过将清洁部件设置为条形清洁部件,以适用于清洁柱状传感器。柱状传感器例如为激光雷达。条形清洁部件与柱状传感器的外表面贴合性较好,从而提高了清洁的效果。
图3示意性示出了根据本公开另一实施例的清洁装置的结构图。
如图3所示,清洁装置的底座110例如为环形底座,清洁部件120例如为环形清洁部件。
环形清洁部件与环形底座相对地设置,环形底座和环形清洁部件例如均套接于传感器200。其中,第一驱动部件130被配置为驱动环形清洁部件沿着环形底座的轴向OO’运动,例如沿着轴向OO’相对于环形底座平移。例如,第一驱动部件130驱动环形清洁部件沿着方向C平移至位置P
环形清洁部件例如包括环形支撑件123和第二刷毛124。环形支撑件123例如与第一驱动部件130连接,第二刷毛124例如设置于环形支撑件123的内表面。即,第二刷毛124始终朝向传感器200的外表面210,并与外表面210贴合,以对传感器200的外表面210进行清洁。
环形清洁部件所在的平面与环形底座所在平面之间的夹角为第二预设夹角α
如图3所示,第二驱动部件140例如可以驱动环形清洁部件振动,振动方向可以是任意方向。例如以环形清洁部件的以当前位置为起点,驱动环形清洁部件在周围小幅度地来回振动。
如图3所示,清洁装置还可以包括连杆结构150。连杆结构150例如包括第一端部和第二端部,第一端部和环形清洁部件连接,第二端部例如与第一驱动部件130连接。第一驱动部件130驱动连杆结构150运动,由连杆结构150带动环形清洁部件运动。
第二驱动部件140例如与连杆结构150连接,例如第二驱动部件140固定于连杆结构150。
根据本公开的实施例,通过将清洁部件设置为环形清洁部件,以适用于清洁柱状传感器。柱状传感器例如为激光雷达。环形清洁部件与柱状传感器的外表面贴合性较好,从而提高了清洁的效果。
图4示意性示出了根据本公开另一实施例的清洁装置的结构图。
图5示意性示出了根据本公开另一实施例的清洁装置的结构图。
如图4和图5所示,清洁部件120例如包括弧形清洁部件。
弧形清洁部件设置于底座的一侧,第一驱动部件130被配置为驱动弧形清洁部件相对底座转动或平移,以贴合传感器200的外表面210运动,从而对传感器200的外表面210进行清洁。
弧形清洁部件包括弧形支撑件125和第三刷毛126。弧形支撑件125与第一驱动部件130连接,第三刷毛126设置于弧形支撑件125的内表面。即,第三刷毛126始终朝向传感器200的外表面210,并与外表面210贴合,以对传感器200的外表面210进行清洁。
如图4和图5所示,第二驱动部件140例如可以驱动弧形清洁部件振动,振动方向可以是任意方向。例如以弧形清洁部件的以当前位置为起点,驱动弧形清洁部件在周围小幅度地来回振动。
如图4和图5所示,清洁装置还可以包括连杆结构150。连杆结构150例如包括第一端部和第二端部,第一端部和弧形清洁部件连接,第二端部例如与第一驱动部件130连接。第一驱动部件130驱动连杆结构150运动,由连杆结构150带动弧形清洁部件运动。
第二驱动部件140例如与连杆结构150连接,例如第二驱动部件140固定于连杆结构150。
根据本公开的实施例,通过将清洁部件设置为弧形清洁部件,以适用于清洁凸面传感器。凸面传感器例如包括固态激光雷达、相机等。弧形清洁部件与凸面传感器的外表面贴合性较好,从而提高了清洁的效果。
可以理解,本公开实施例不限制清洁部件的形状,可以是条形状、圆环状、弧形状等,还可以是其他任意形状,只要能够与传感器的外表面贴合即可。另外,本公开的实施例对于第一驱动部件驱动清洁部件的运动方向也不作具体限制,只要能够清洁传感器的外表面即可。
通过本公开实施例的清洁装置,能够在清洁传感器的感知区域(外表面)的同时,不损伤感知区域的镀膜结构或表面光洁度。即使传感器遇到砂石,也可通过驱动清洁部件进行振动以去除砂石,以避免砂石划伤传感器。另外,驱动清洁部件进行振动能够实现清洁装置的自身清洁,避免灰尘或砂石累积在清洁部件的表面。
可以理解,本公开实施例的清洁装置无需对传感器进行频繁往复的刮擦,相比于相关技术的清洁装置,本公开实施例的清洁装置在清洁相同的区域时可以使用更小的行程,便于清洁装置的布局。
本公开的另一实施例还提供了一种数据采集装置,该数据采集装置包括传感器和清洁装置,传感器例如设置于清洁装置的底座。
该清洁装置例如包括:底座、清洁部件、第一驱动部件和第二驱动部件。其中,第一驱动部件与底座和清洁部件连接,第一驱动部件被配置为驱动清洁部件以第一方式运动。第二驱动部件与清洁部件连接,第二驱动部件被配置为驱动清洁部件以第二方式运动,第二方式与第一方式不同。该清洁装置的具体结构可参考上文,在此不再赘述。
上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
- 清洁装置和数据采集装置
- 清洁装置和数据采集装置