一种盾构掘进机管片拼装高效精密同步提升液压控制系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于液压控制领域,具体为一种盾构掘进机管片拼装高效精密同步提 升液压控制系统。
背景技术
盾构掘进机是隧道施工的重要工具。作为盾构机的核心子系统,管片拼装系 统主要负责支护开挖的隧道。负载质量大、工作空间狭小、施工精度高,是盾构 掘进机管片拼装系统工作的重要特点。目前,盾构掘进机管片拼装系统多基于恒 压油源网络设计,并采用比例阀调节液压缸的位置,存在较大的溢流与节流损失、 控制分辨率低等问题。此外,传统设计方法,采用两个提升液压缸并联驱动,极 易引起两个液压缸不同步的问题。
发明内容
技术上述问题,本申请提供一种可实现高效率、高速、高精度地同步提升定 位液压控制系统。其技术方案为,
一种盾构掘进机管片拼装高效精密同步提升液压控制系统,包括两个双出杆 液压缸和两个伺服电机,每个所述的伺服电机均控制两个所述的双出杆液压缸, 每个所述的双出杆液压缸与伺服电机之间依次设有换向阀组、比例节流阀组,每 个所述双出杆液压缸上均设有位移传感器,所述位移传感器分别与同步位移控制 器和位移速度控制器连接,所述同步位移控制器与所述比例节流阀连接,所述位 移速度控制器分别与两个伺服电机连接。
进一步的,所述换向阀组与比例节流阀组之间设有两个先导平衡阀;两个所 述伺服电机分别为一个高功率伺服电机和一个低功率伺服电机。
进一步的,所述比例节流阀组包括第一单向比例节流阀、第二单向比例节流 阀、第三单向比例节流阀和第四单向比例节流阀;所述换向阀组包括四个两位两 通电磁换向阀。
进一步的,所述每个双出杆液压缸的两个油腔上均设有压力传感器。
进一步的,其中一个所述的双出杆液压缸的两个油腔各自通过一个两位两通 电磁换向阀分别与一个先导平衡阀的B口、A口连接,所述先导平衡阀的C口、 D口分别与第一单向比例节流阀和第二单向比例节流阀连接。
进一步的,另一个所述的双出杆液压缸的两个油腔各自通过一个两位两通电 磁换向阀分别与另一个先导平衡阀的B口、A口连接,所述先导平衡阀的C口、 D口分别与第三单向比例节流阀和第四单向比例节流阀连接。
进一步的,所述第一单向比例节流阀和第三单向比例节流阀连接后与并联的 大排量双向定量泵、小排量双向定量泵的A口连接;所述第二单向比例节流阀和 第四单向比例节流阀连接后与并联的大排量双向定量泵、小排量双向定量泵的B 口连接,所述大排量双向定量泵与高功率伺服电机连接,小排量双向定量泵与低 功率伺服电机连接。
进一步的,所述第一比例节流阀和第四比例节流阀之间分别设有并联的补油 系统和排压系统,所述补油系统包括蓄能器,所述蓄能器位于两个液体流向相反 的单向阀之间;所述排压系统包括油箱,所述油箱出口设有安全阀,所述安全阀 位于两个液体流向相反的单向阀之间。
进一步的,所述两个双出杆液压缸同步向上高速运动时,所述高功率伺服电 机和低功率伺服电机正向转动;所述两个双出杆液压缸同步向下高速运动时,所 述高功率伺服电机和低功率伺服电机反向转动。
进一步的,所述两个双出杆液压缸精密上升运动时,低功率伺服电机正向转 动,高功率伺服电机锁死;两个双出杆液压缸精密下降运动时,低功率伺服电机 反向转动,高功率伺服电机锁死。
有益效果
1.本申请采用集成式泵控液压缸系统实现升降运动控制,降低系统能耗,减 少管路布置;
2.采用两个不同大小的泵(大排量双向定量泵和小排量双向定量泵)提供油 源,分别实现液压缸的高速定位控制与精密定位控制;先导平衡阀有利于提高系 统的稳定;
3.在液压缸的进出口设计分布式单向比例节流阀,实现两个液压缸的同步位 置控制。
附图说明
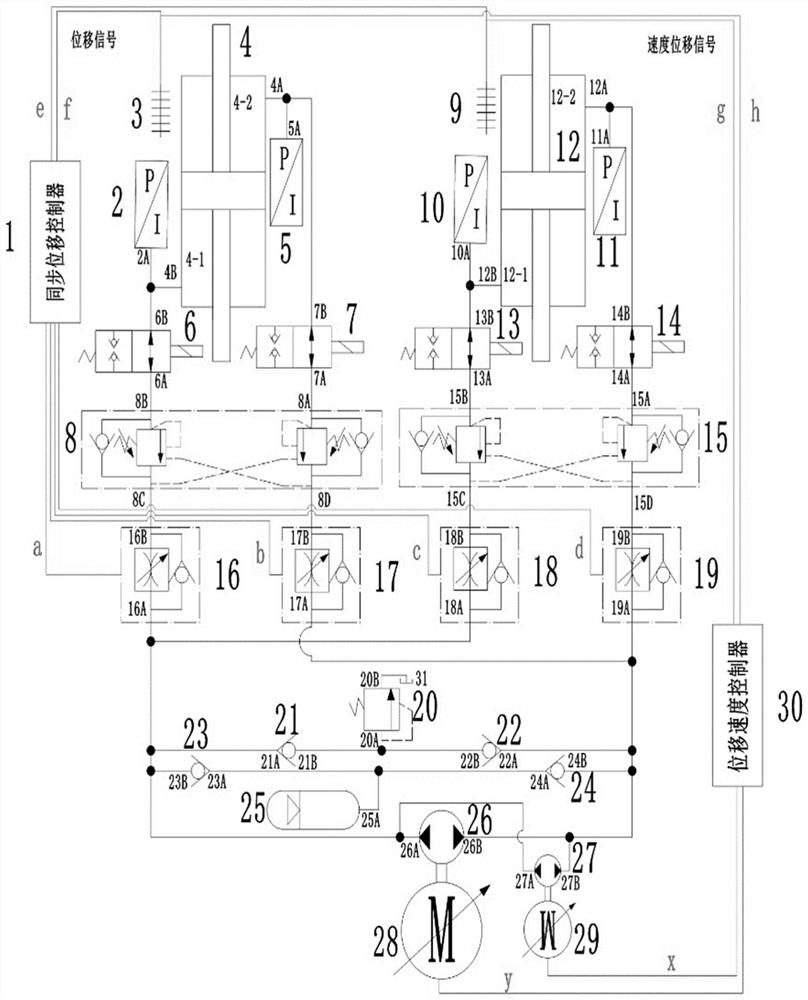
图1为本申请结构原理图;
1-同步位移控制器,2-压力传感器一,3-位移传感器一,4-双出杆液压缸一,5-压力传感器二,6-两位两通电磁换向阀一,7-两位两通电磁换向阀二,8-先导 平衡阀一,9-位移传感器二,10-压力传感器三,11-压力传感器四,12-双出杆 液压缸二;13-两位两通电磁换向阀三,14-两位两通电磁换向阀四,15-先导平 衡阀二,16-第一单向比例节流阀,17-第二单向比例节流阀,18-第三单向比例 节流阀,19-第四单向比例节流阀,20-安全阀,21-单向阀一,22-单向阀二,23- 单向阀三,24-单向阀四,25-蓄能器,26-大排量双向定量泵,27-小排量双向定 量泵,28-高功率伺服电机,29-低功率伺服电机,30-位移速度控制器,31-油箱
具体实施方式
以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指 明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员 通常理解的相同含义。需要注意的是,这里所使用的术语仅是为了描述具体实施 方式,而非意图限制根据本申请的示例性实施方式。
本发明包括同步位移控制器1、压力传感器一2、位移传感器一3、双出杆 液压缸一4、压力传感器二5、两位两通电磁换向阀一6、两位两通电磁换向阀 二7、先导式平衡阀一8、位移传感器二9、压力传感器三10、压力传感器四11、 双出杆液压缸二12、两位两通电磁换向阀三13、两位两通电磁换向阀四14、先 导式平衡阀二15、第一单向比例节流阀16、第二单向比例节流阀17、第三单向 比例节流阀18、第四单向比例节流阀19、安全阀20、单向阀一21、单向阀二 22、单向阀三23、单向阀四24、蓄能器25、大排量双向定量泵26、小排量双向定量泵27、高功率伺服电机28、低功率伺服电机29、位移速度控制器30、油箱 31、控制线路a、控制线路b、控制线路c、控制线路d、控制线路e、控制线路 f、控制线路g、控制线路h、控制线路x、控制线路y。
双出杆液压缸一4包括两个腔室;双出杆液压缸二12包括两个腔室。
所述比例节流阀组包括第一单向比例节流阀、第二单向比例节流阀、第三单 向比例节流阀和第四单向比例节流阀;所述换向阀组包括四个两位两通电磁换向 阀,分别为两位两通电磁换向阀一、两位两通电磁换向阀二、两位两通电磁换向 阀三、两位两通电磁换向阀四。
系统液压回路:双出杆液压缸一4的B口分别与两位两通电磁换向阀6的B 口、压力传感器一2的A口相连;两位两通电磁换向阀一6的A口与先导式平衡 阀一8的B口相连;先导式平衡阀一8的C口与第一单向比例节流阀16的B口 相连;双出杆液压缸二12的B口分别与两位两通电磁换向阀三13的B口、压力 传感器三10的A口相连;两位两通电磁换向阀三13的A口与先导式平衡阀二 15的B口相连;先导式平衡阀二15的C口与第三单向比例节流阀18的B口相 连;第三单向比例节流阀18的A口与第一单向比例节流阀16的A口相连;双出 杆液压缸一4的A口分别与两位两通电磁换向阀7的B口、压力传感器5的A 口相连;两位两通电磁换向阀二7的A口与先导式平衡阀一8的A口相连;先导 式平衡阀一8的D口与第二单向比例节流阀17的B口相连;双出杆液压缸二12 的A口分别与两位两通电磁换向阀四14的B口、压力传感器四11的A口相连; 两位两通电磁换向阀四14的A口与先导式平衡阀二15的A口相连;先导式平衡 阀二15的D口与第四单向比例节流阀19的B口相连;第四单向比例节流阀19 的A口与第二单向比例节流阀17的A口相连;第一单向比例节流阀16的A口分 别与单向阀一21的A口、单向阀三23的B口、大排量双向定量泵26的A口、 小排量双向定量泵27的A口相连;第四单向比例节流阀19的A口分别与单向阀 二22的A口、单向阀四24的B口、大排量双向定量泵26的B口、小排量双向 定量泵27的B口相连;蓄能器25的A口分别与单向阀三23的A口和单向阀四 24的A口相连;安全阀20的A口分别与单向阀一21的B口和单向阀二22的B 口相连;安全阀20的B口与油箱31相连。大排量双向定量泵26控制高功率伺 服电机28,小排量双向定量泵27控制低功率伺服电机。
系统控制回路:获取双出杆液压缸一4的位置信号的位移传感器一3通过控 制线路f与同步位移控制器1相连;获取双出杆液压缸二12的位置信号的位移 传感器二9通过控制线路e与同步位移控制器1相连;同步位移控制器1分别通 过控制线路a与第一单向比例节流阀16相连、通过控制线路b与第二单向比例 节流阀17相连、通过控制线路c与第三单向比例节流阀18相连、通过控制线路 d与第四单向比例节流阀19相连;获取双出杆液压缸4的位置信位移传感器一3 通过控制线路h与速度位移控制器30相连;获取双出杆液压缸二12的位置信号 的位移传感器二9通过控制线路g与速度位移控制器30相连;速度位移控制器30分别通过控制线路x与低耗率伺服电机29相连、通过控制线路y与高功率伺 服电机28相连。
具体控制过程如下:
需要液压系统保持压力时,两位两通电磁换向阀一6、两位两通电磁换向阀 三13位于左位使得双出杆液压缸一4的4-1腔室内的压力油以及双出杆液压缸 二12的12-1腔室内的压力油无法流出;两位两通电磁换向阀二7、两位两通电 磁换向阀四14位于左位使得双出杆液压缸一4的4-2腔室内的压力油以及双出 杆液压缸二12的12-2腔室内的压力油无法流出,从而实现液压系统的保压并使 双出杆液压缸一4和双出杆液压缸二12能够保持在一个固定位置。
双出杆液压缸高速上升运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位; 高功率伺服电机28正向转动,低功率伺服电机29正向转动;位移传感器一3、 位移传感器二9分别通过控制线路h、控制线路g将位移反馈信号传递给位移速 度控制器30,位移速度控制器30根据位移信号调整低功率伺服电机29、高功率 伺服电机28的转速,使得小排量双向定量泵27的A口和大排量双向定量泵26 的A口输出系统所需的大流量的高压油;大流量的高压油分别经管路由第一单向 比例节流阀16的A口流入第一单向比例节流阀16,经管路由第三单向比例节流阀18的A口流入第三单向比例节流阀18;位移传感器二9将双出杆液压缸二12 的位置信号通过控制线路e反馈给同步位移传感器1,位移传感器一3将双出杆 液压缸一4的位置信号通过控制线路f反馈给同步位移传感器1,同步位移传感 器1实时调节第一单向比例节流阀16与第三单向比例节流阀18的阀口大小;大 流量高压油经第一单向比例节流阀16后由第一单向比例节流阀16的B口流出, 经管路由先导式平衡阀一8的C口流入,经先导式平衡阀一8后由B口流出;大 流量高压油经第三单向比例节流阀18后由第三单向比例节流阀18的B口流出, 经管路由先导式平衡阀二15的C口流入,经先导式平衡阀二15后由B口流出; 由平衡阀一8的B口流出的大流量高压油由两位两通电磁换向阀一6的A口流入, 经两位两通电磁换向阀一6的B口流出,两位两通电磁换向阀一6的B口流出的 大流量液压油经双出杆液压缸一4的B口进入4-1腔室内;由先导式平衡阀二 15的B口流出的大流量高压油由两位两通电磁换向阀三13的A口流入,B口流 出,其B口流出的大流量液压油经双出杆液压缸二12的B口流入双出杆液压缸 二12的12-1腔室内;双出杆液压缸一4与双出杆液压缸二12在油液作用下高 速向上运动;双出杆液压缸一4的4-2腔室的液压油经4A口流出后由两位两通电磁换向阀二7的B口流入两位两通电磁换向阀7,由其A口流出,经先导式平 衡阀一8的A口流入先导式平衡阀8,由其D口流出,经第二单向比例节流阀17 的B口流入第二单向比例节流阀17,经由其A口流出;双出杆液压缸二12的12-2 腔室的液压油经其A口流出后由两位两通电磁换向阀四14的B口流入两位两通 电磁换向阀14和压力传感器四11,液压油流经两位两通电磁换向阀四14后由 其A口流出,流入先导式平衡阀二15,经先导式平衡阀二15后由其D口流出, 经第四单向比例节流阀19的B口流入,A口流出;第二单向比例节流阀17的A 口流出的液压油与第四单向比例节流阀19的A口流出的液压油一同流入大排量 双向定量泵26的B端和小排量双向定量泵27的B端;实现双出杆液压缸4一和 双出杆液压缸二12高速同步向上运动。
双出杆液压缸高速下降运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位; 高功率伺服电机28反向转动,低功率伺服电机29反向转动;位移传感器一3、 位移传感器二9分别通过控制线路h、g将位移反馈信号传递给位移速度控制器 30,位移速度控制器30根据位移信号调整低功率伺服电机29、高功率伺服电机 28的转速,使得小排量双向定量泵27的B口和大排量双向定量泵26的B口输 出系统所需的大流量的高压油;大流量的高压油分别经管路由第二单向比例节流 阀17的A口流入第二单向比例节流阀17,经管路由第四单向比例节流阀19的A口流入第四单向比例节流阀19;位移传感器二9将双出杆液压缸二12的位置信 号通过控制线路e反馈给同步位移传感器1,位移传感器一3将双出杆液压缸一 4的位置信号通过控制线路f反馈给同步位移传感器1,同步位移传感器1实时 调节第一单向比例节流阀17与第三单向比例节流阀19的阀口大小;大流量高压 油经第二单向比例节流阀17后由其B口流出,经管路由先导式平衡阀一8的D 口流入,A口流出;大流量高压油经第四单向比例节流阀19后由其B口流出, 经管路由先导式平衡阀二15的D口流入,经先导式平衡阀二15后由A口流出; 由先导式平衡阀一8的A口流出的大流量高压油由两位两通电磁换向阀二7的A 口流入、B口流出,其B口流出的大流量液压油经双出杆液压缸一4的A口流入 4-2腔室内;由先导式平衡阀二15的A口流出的大流量高压油由两位两通电磁 换向阀四14的A口流入、B口流出,其B口流出的大流量液压油经双出杆液压 缸二12的A口流入12-2腔室内;双出杆液压缸一4与双出杆液压缸二12在油 液作用下高速向下运动;双出杆液压缸一4的4-1腔室的液压油经B口流出后由 两位两通电磁换向阀6的6B口流入两位两通电磁换向阀6,液压油流经两位两 通电磁换向阀一6后由其A口流出,经先导式平衡阀一8的B口流入、C口流出, 其C口流出的液压油经第一单向比例节流阀16的B口流入、A口流出;双出杆 液压缸二12的12-1腔室的液压油经其B口流出后由两位两通电磁换向阀三13 的B口流入、A口流出,两位两通电磁换向阀三13的A口流出的液压油经先导 式平衡阀二15的B口流入、C口流出,先导式平衡阀二15的C口流出的液压油 经第三单向比例节流阀18的B口流入、A口流出;第一单向比例节流阀16的A 口流出的液压油与第三单向比例节流阀18的A口流出的液压油一同流入大排量双向定量泵26的A端和小排量双向定量泵27的A端;实现双出杆液压缸一4 和双出杆液压缸二12高速同步向下运动。
双出杆液压缸精密上升运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位; 低功率伺服电机29正向转动,高功率伺服电机28锁死;位移传感器一3、位移 传感器二9分别通过控制线路h、控制线路g将位移反馈信号传递给位移速度控 制器30,位移速度控制器30根据位移信号调整低功率伺服电机29的转速,使 得小排量双向定量泵27的A口输出系统所需的液压油,其A口输出的液压油分 别经第一单向比例节流阀16的A口流入后由B口流出,经第三单向比例节流阀 18的A口流入后由B口流出;位移传感器二9将双出杆液压缸二12的位置信号 通过控制线路e反馈给同步位移传感器1,位移传感器一3将双出杆液压缸一4 的位置信号通过控制线路f反馈给同步位移传感器1,同步位移传感器1实时调 节第一单向比例节流阀16与第三单向比例节流阀18的阀口大小;第一单向比例 节流阀16的B口流出的液压油经管道由先导式平衡阀一8的C口流入、B口流 出;第三单向比例节流阀18的B口流出的液压油经管道由先导式平衡阀15的C 口流入、B口流出;由先导式平衡阀一8的B口流出的液压油由两位两通电磁 换向阀一6的A口流入、B口流出,两位两通电磁换向阀一6的B口流出的液压 油经双出杆液压缸一4的B口流入的4-1腔室内;由先导平衡阀二15的B口流 出的液压油由两位两通电磁换向阀三13的A口流入、B口流出,两位两通电磁 换向阀三13的B口流出的液压油经双出杆液压缸二12的B口流入12-1腔室内; 双出杆液压缸一4与双出杆液压缸二12在油液作用下向上运动;双出杆液压缸 一4的4-2腔室的液压油经其A口流出后由两位两通电磁换向阀二7的B口流入 两位两通电磁换向阀7,由其A口流出,两位两通电磁换向阀二7的A口流出的 液压油经先导式平衡阀一8的A口流入、D口流出,其D口流出的液压油经第二 单向比例节流阀17的B口流入第二单向比例节流阀17,由A口流出;双出杆液 压缸二12的12-2腔室的液压油经其A口流出后由两位两通电磁换向阀四14的 B口流入两位两通电磁换向阀14,由其A口流出,经先导平衡阀二15的A口流 入、D口流出,先导平衡阀二15的D口流出的液压油经第四单向比例节流阀19 的B口流入、A口流出;第二单向比例节流阀17的A口流出的液压油与第四单 向比例节流阀19的A口流出的液压油一同流入小排量双向定量泵27的B端;从 而实现双出杆液压缸一4和双出杆液压缸二12精密同步向上运动。
双出杆液压缸精密下降运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位; 低功率伺服电机29反向转动,高功率伺服电机28锁死;位移传感器一3、位移 传感器二9分别通过控制线路h、g将位移反馈信号传递给位移速度控制器30, 位移速度控制器30根据位移信号调整低功率伺服电机29的转速,使得小排量双 向定量泵27的B口输出系统所需的液压油,经第二单向比例节流阀17的A口流 入后由其B口流出,第四单向比例节流阀19的A口流入、B口流出;位移传感 器二9将双出杆液压缸二12的位置信号通过控制线路e反馈给同步位移传感器 1,位移传感器一3将双出杆液压缸一4的位置信号通过控制线路f反馈给同步 位移传感器1,同步位移传感器1实时调节第一单向比例节流阀17与第三单向 比例节流阀19的阀口大小;第二单向比例节流阀17的B口流出的液压油经管道 由先导式平衡阀8二的D口流入、A口流出;第四单向比例节流阀19的B口流 出的液压油经管道由先导式平衡阀二15的D口流入、A口流出;由先导式平衡 阀一8的A口流出的液压油由两位两通电磁换向阀二7的A口流入、B口流出, 经双出杆液压缸一4的A口流入的4-2腔室内;由先导式平衡阀二15的A口流 出的液压油由两位两通电磁换向阀四14的A口流入、B口流出,两通电磁换向 阀四14的B口流出的液压油经双出杆液压缸二12的A口流入的12-2腔室内; 双出杆液压缸一4与双出杆液压缸二12在油液作用下向下运动;双出杆液压缸 一4的4-1腔室的液压油经B口流出后由两位两通电磁换向阀一6的B口流入、 A口流出,其A口流出的液压油经先导式平衡阀一8的B口流入、C口流出,其 C口流出的液压油经第一单向比例节流阀16的B口流入、A口流出;双出杆液压 缸二12的12-1腔室的液压油经B口流出后由两位两通电磁换向阀三13的B口 流入两位两通电磁换向阀13,液压油流经两位两通电磁换向阀13后由其A口流 出,流入先导式平衡阀二15的B口,经先导式平衡阀二15后由其C口流出,先 导式平衡阀二15的C口流出的液压油经第三单向比例节流阀18的B口流入、A 口流出;第一单向比例节流阀16的A口流出的液压油与第三单向比例节流阀18 的A口流出的液压油一同流入大排量双向定量泵27的A端;从而实现双出杆液 压缸一4和双出杆液压缸二12精密同步向下运动。
双出杆液压缸同步上升运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位, 高功率伺服电机28和低功率伺服电机29正向转动(或低功率伺服电机29单独 正向转动),位移传感器一3、位移传感器二9分别通过控制线路h、控制线路 g将位移反馈信号传递给位移速度控制器30,位移速度控制器30根据位移信号 同时调整高功率伺服电机28的转速和低功率伺服电机29的转速(或单独调节低 功率伺服电机29的转速),使得小排量双向定量泵27的A口和大排量双向定量 泵26的A口(或者小排量双向定量泵27的A口)输出系统所需的液压油;大排 量双向定量泵26的A端和小排量双向定量泵27的A端(或者小排量双向定量泵 27的A端)输出高压油;输出的液压油分别经第一单向比例节流阀16的A口流 入、B口流出,经第三单向比例节流阀18的A口流入、B口流出;位移传感器二 9将双出杆液压缸二12的位置信号通过控制线路e反馈给同步位移传感器1,位 移传感器一3将双出杆液压缸二4的位置信号通过控制线路f反馈给同步位移传 感器1,同步位移传感器1通过改变第一单向比例节流阀16与第三单向比例节 流阀18的阀口大小,调节双出杆液压一4与双出杆液压二12的流量分配,实现两者位置同步控制;第一单向比例节流阀16的B口流出的液压油经管道由先导 式平衡阀一8的C口流入、B口流出;第三单向比例节流阀18的B口流出的液 压油经管道由先导式平衡阀二15的C口流入、B口流出;由先导平衡阀一8的B 口流出的液压油由两位两通电磁换向阀一6的A口流入、B口流出,由双出杆液 压一4的B口流入4-1腔室内;由先导式平衡阀二15的B口流出的液压油由两 位两通电磁换向阀三13的A口流入、B口流出,由双出杆液压缸二12的B口流 入12-1腔室内;双出杆液压缸一4的4-2腔室的液压油经A口流出后由两位两 通电磁换向阀二7的B口流入、A口流出,两位两通电磁换向阀二7的A口流出 的液压油经先导式平衡阀一8的A口流入,D口流出,经过第二单向比例节流阀 17由其A口流出;双出杆液压缸二12的12-2腔室的液压油经A口流出后由两 位两通电磁换向阀四14的B口流入两位两通电磁换向阀四14,液压油流经两位 两通电磁换向阀四14后由其A口流出,经先导式平衡阀二15的A口流入、D口 流出,先导式平衡阀二15的D口流出的液压油经第四单向比例节流阀19的B口流入、A口流出;第二单向比例节流阀17的A口流出的液压油与第四单向比 例节流阀19的A口流出的液压油一同流入大排量双向定量泵26的B端与小排量 双向定量泵27的B端。最终,实现双出杆液压缸一4和双出杆液压缸二12同步 向上运动。
双出杆液压缸同步下降运动时,两位两通电磁换向阀一6、两位两通电磁换 向阀二7、两位两通电磁换向阀三13、两位两通电磁换向阀四14均位于右位, 高功率伺服电机28和低功率伺服电机29反向转动(或低功率伺服电机29单独 反向转动),位移传感器一3、位移传感器9二分别通过控制线路h、g将位移 反馈信号传递给位移速度控制器30,位移速度控制器30根据位移信号调整低功 率伺服电机29和高功率伺服电机28的转速(或单独调整低功率伺服电机29的 转速),使得小排量双向定量泵27的B口和大排量双向定量泵26的B口(或者 小排量双向定量泵27的B口)输出系统所需的液压油;大排量双向定量泵26 的B端和小排量双向定量泵27的B端(或者小排量双向定量泵27的B端)输出 高压油;输出的液压油分别经第二单向比例节流阀17的A口流入、B口流出, 经第四单向比例节流阀19的A口流入、B口流出;位移传感器二9将双出杆液 压缸二12的位置信号通过控制线路e反馈给同步位移传感器1,位移传感器一3 将双出杆液压缸一4的位置信号通过控制线路f反馈给同步位移传感器1,同步 位移传感器1通过改变第二单向比例节流阀17与第四单向比例节流阀19的阀口 大小,调节双出杆液压缸一4与双出杆液压缸二12的流量分配,实现两者的位 置同步控制;第二单向比例节流阀17的B口流出的液压油经管道由先导式平衡 阀一8的D口流入、A口流出;第四单向比例节流阀19的B口流出的液压油经 管道由先导式平衡阀二15的D口流入、A口流出;由先导式平衡阀一8的A口 流出的液压油由两位两通电磁换向阀二7的A口流入、B口流出,两位两通电磁 换向阀二7的B口流出的液压油经双出杆液压缸一4的A口流入4-2腔室内;由 先导式平衡阀二15的A口流出的液压油由两位两通电磁换向阀四14的A口流入、 B口流出,两位两通电磁换向阀四14的B口流出的液压油经双出杆液压缸二12 的A口流入的12-2腔室内;双出杆液压缸一4与双出杆液压缸二12在油液作用 下向下运动;双出杆液压缸一4的4-1腔室的液压油经其B口流出后由两位两通 电磁换向阀一6的B口流入两位两通电磁换向阀一6,液压油流经两位两通电磁 换向阀6后由A口流出,经先导式平衡阀一8的B口流入、C口流出,先导式平 衡阀一8的C口流出的液压油经第一单向比例节流阀16的B口流入,A口流出; 双出杆液压缸二12的12-1腔室的液压油经B口流出后由两位两通电磁换向阀三 13的B口流入两位两通电磁换向阀三13,液压油流经两位两通电磁换向阀三13 后由A口流出,两位两通电磁换向阀三13的A口流出的液压油经先导式平衡阀 二15的B口流入、C口流出,先导式平衡阀二15的C口流出的液压油经第三 单向比例节流阀18的B口流入、A口流出;第一单向比例节流阀16的A口流出 的液压油与第三单向比例节流阀18的A口流出的液压油一同流入大排量双向定 量泵26的A端和小排量双向定量泵27的A端;从而实现双出杆液压缸一4和双 出杆液压缸二12精密同步向下运动。
当液压系统的发生油泄露或者高压溢流时,蓄能器25内的液压油由A口流 出,通过单向阀三23的A口流入单向阀23(或通过单向阀四24的A口流入单 向阀24);液压油流经单向阀三23(或单向阀四24)后分别经单向阀三23的B 口(或单向阀四24的B口)流出,为系统补油。
当液压系统内的液压油压力超过卸荷阀预先设定的压力时,系统内的压力油 将通过单向阀一21的A口(或者单向阀二22的A口)流入单向阀一21(或者 单向阀二22),液压油流经单向阀一21(或单向阀二22)后由单向阀一21的B 口(或单向阀二22的B口)流出;由单向阀一21的B口和单向阀二22的B口 流出的液压油通过安全阀20的A口流入安全阀20并由B口流入油箱31。
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域 的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内, 所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 一种盾构掘进机管片拼装高效精密同步提升液压控制系统
- 一种盾构管片拼装机液压控制系统