一种用于无人机的电磁弹射装置
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于无人机弹射技术领域,具体涉及一种用于无人机的电磁弹射装置。
背景技术
自美国陆军通信部队与1918年设计并研发出第一架无人机至今,它已逐建成为现代战争中不可过或缺的一部分,越来越多的国家将无人机投入战场,用于开展攻击、侦查甚至救援等作战任务。在无人机执行任务的过程中,无人机的发射方式显得尤为重要,发射方式直接决定了无人机能否平稳起飞升空,无人机具有多种发射方式,如手抛、弹射、火箭助推和空中投放等,一般来讲可按照无人机发射装置主体部分所在地点分为:空基发射、陆基发射和海基发射,也可按照无人机是否需要外部设备提供动力分为自力发射和他力发射两大部分,而在通常情况下无人机的自力发射需要在无人机上安放小型功能设备以保证自主起飞,但这样会大大增加起飞过载,在军事领域应用较少;因此,需提供一种发射负载小的自力发射装置,为无人机的军事领域应用提供更多的发射方式。
发明内容
为解决上述技术问题,本发明提供了一种用于无人机的电磁弹射装置。
本发明通过以下技术方案得以实现。
本发明提供的一种用于无人机的电磁弹射装置,包括底盘、架体、动子、定子、滑车以及电动推杆;所述架体底部通过转动支耳与底盘上表面连接,电动推杆一端与架体中部连接,另一端安装于底盘上表面,通过电动推杆的作动可使架体在底盘上进行俯仰;所述定子为多个呈“一”字形均匀分布于架体两侧的绕组,架体上设有导轨,所述动子安装于导轨上,动子上安装有永磁体,定子通电形成磁场后,动子可沿着导轨随磁场变化进行往复运动;所述滑车下端与动子固定连接,无人机设置于滑车上端;无进行弹射时,定子通电形成磁场推动动子,滑车在动子的带动下向前滑动同时带动无人机前进,运动一段距离后动子制动,无人机借助惯性继续前进离架,完成弹射。
优选地,所述架体包括架体骨架、导轨、铰接座以及皮带轮组;所述导轨设置于架体骨架上端,架体骨架的两侧设有安装定子的接口,定子安装于骨架的两侧;所述铰接座设置于架体骨架的底部,用于与底盘铰接;所述皮带轮组安装于架体骨架下端,通过皮带与动子进行装配。
优选地,所述动子包括永磁体、上支撑架、下支撑架、轴承安装座以及主轴承;所述上支撑架与下支撑架相连接,永磁体安装于上支撑架与下支撑架连接处;所述轴承安装座设置于上支撑架上端,主轴承安装于轴承安装座的两端;进行电磁弹射装置的装配时主轴承嵌入导轨中。
优选地,所述滑车主要由底板以及滑车骨架组成,所述滑车骨架紧固安装于底板上放,底板下方设有与动子连接安装的接口,底板紧固安装于动子上;滑车骨架上方设有与无人机连接安装的接口,无人机在弹射准备时安装于滑车骨架上。
优选地,还包括一个支撑装置,所述支撑装置安装于架体的底端,由两件1.5t支脚组成。
优选地,所述上支撑架、下支撑架和轴承安装座采用航空铝加工而成。
优选地,所述滑车还包括闭锁释放装置,所述闭锁释放装置设置于滑车骨架上端,与无人机底部连接,待发射时将无人机锁紧于滑车骨架上,发射时,闭锁释放装置解锁,使无人机可从滑车骨架上脱离。
优选地,所述架体骨架由铝型材焊接成型,所述滑车骨架由铝管焊接而成。
优选地,还包括一个吸能装置,所述吸能装置固定安装于架体上顶端部,动子作动进行无人机弹射时,运动至架体上顶端部时被吸能装置阻挡进行止动。
优选地,还包括电控装置,所述电控装置安装于底盘上,与电动推杆电气连接,控制电动推杆的作动,从而调节架体的俯仰。
本发明的有益效果在于:本发明提供的用于无人机的电磁弹射装置具有结构简单、紧凑可靠的特点,同时,各部件故障率低且各部件互换性较高,维修方便;此外其作为无人机的弹射装置,发射负载小,成本较低,便于储存和运输,快速性好,控制效率及控制的准确性较高。
附图说明
图1是本发明的结构示意图;
图2是本发明的架体结构示意图;
图3是本发明的架体俯视图;
图4是本发明的动子结构示意图;
图5是本发明的图4的俯视图;
图6是本发明的滑车结构示意图;
图7是本发明图6的侧视图;
图8是本发明的装置工作流程图;
图中:1-吸能装置,2-电控装置,3-架体,31-架体骨架,32-导轨,33-铰接座,34-皮带轮组,35-皮带,4-电动推杆,5-定子,6-动子,61-永磁体;62-上支撑架;63-主轴承;64-下支撑架;65-轴承安装座,7-滑车,71-底板,72-滑车骨架,73-闭锁释放装置,8-支撑装置,9-底盘。
具体实施方式
下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
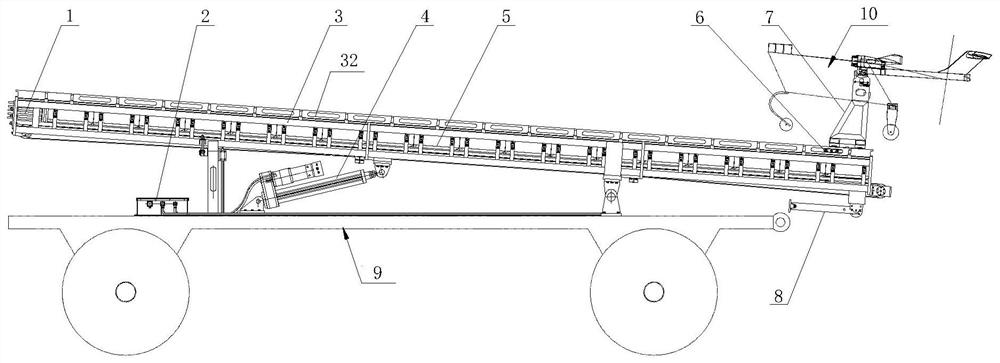
如图1所示,本弹射装置主要由架体3、动子6、定子5、滑车7、吸能装置1、电动推杆4、支撑装置8和电控装置2等组成。在底盘9的上平面设置接口用于安装架体3、转动支耳和电动推杆4,电动推杆4一端安装在底盘9上,另一端和弹架体3连接,通过控制编码器可以使弹射架体3在(0°~20°)±0.5°进行俯仰,从而控制无人机的弹射角度。无人机弹射时滑车7在动子6的带动下向前滑动,安装在滑车7上的闭锁释放装置73加速度达到指定范围后打开释放无人机与滑车7朝前的自由度,动子6在吸能装置1处制动后无人机飞离架体。支撑装置8由两件1.5t支脚组成,可实现发射角度内任意角度的支撑,能承受发射时的冲击力,是具备旋转和伸缩功能的适应性支脚。
如图2-3所示,架体3主要由架体骨架31、导轨32、铰接座33、皮带轮组34等组成,架体骨架31主要由铝型材焊接成型;架体骨架31上有安装定子5的接口,定子5成一字型均匀分布在架体骨架31两侧,紧固方式采用螺栓连接,同时架体骨架31还用于安装动子6、定子5和皮带35。
如图4-5所示,动子6主要由永磁体61、上支撑架62、下支撑架63、轴承安装座65、主轴承64等组成。上支撑架62、下支撑架63和轴承安装座65采用航空铝加工而成,通过螺栓进行连接,为永磁体61和主轴承64提供稳定支撑,进而实现动子6在导轨32上灵活滑动,为保证紧固件不被磁化,紧固件均采用不锈钢材质。动子6安装后将皮带35与动子6装配好。
如图6-7所示,滑车7主要由底板71、滑车骨架72组成。滑车骨架72由铝管焊接而成,底板71有与动子6连接的接口,上方有与无人机安装的接口,闭锁释放装置73安装在滑车骨架72上。
同时,具体实施时,本装置还配备有电气系统,电气系统主要完成上位机指令下达转接,电源接口转接,数据采集转接及与直流电机、编码器、限位开关的连接等功能。上位机发送指令控制直流电机正反转以及电机转速,实现转位机构的起竖、俯仰控制,通过采集编码器值完成转位机构精确位置控制,通过电动推杆4伸缩使其达到装填、发射和行军所需的俯仰角度。滑车7与无人机连接,通过动子6的带动可沿架体3上的导轨32运动,且滑车7上安装了机械摆锤式的闭锁释放装置73,可对无人机进行限位和发射方向自由释放。
- 一种适用于无人机电磁弹射的直线弹射电动机
- 一种用于无人机的电磁弹射装置