可精确控制的双向倾斜地面出入式盾构始发模型试验装置
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于盾构试验技术领域,涉及可精确控制的双向倾斜地面出入式盾构始发模型试验装置,适用于地面出入式盾构模型试验。
背景技术
传统的隧道施工中,为了实现隧道地面段和地下段的连接,一般需要在盾构出发和接收两端设置工作井,在引导盾构机进出洞之后,在工作井外侧采用明挖或是暗挖的施工方法,将地面路段和地下路段连接起来。传统施工方法的缺点有:需要在施工过程中采取降水、加固洞口等措施,盾构始发和接收的工程风险较大;明挖或暗挖完成连接段施工时需要投入较多人力和物力,且对周围环境影响较大;施工过程长时间占用交通道路空间,涉及交通改道和地下管线搬迁,工作量较高。为了克服传统施工方法在地面段与地下段之间的连接段施工时的弊端,地面出入式盾构施工方法直接从地面进出,减少了大量人力和物力,大幅度减少工期;且其受施工环境的影响较小,规避了大量工程风险;对环境的影响也相对较小,减少了交通改道和地下管线搬迁的工程量,经济效益和社会效益明显。
盾构施工的始发和接收一直是盾构施工的重中之重,盾构始发的安全性和精确度直接影响着接下来的盾构施工质量。模型试验是验证施工可行性和质量的重要方法,可以为现场的施工组织设计与相关施工参数提供重要理论依据和指导。传统的盾构始发模型试验设备通常用于传统的盾构始发方法即井下始发的方法,其具有不能调节盾构始发角度、缺乏精确的电控手段、人工操纵的误差较大等缺点,不适合用于地面出入式盾构始发模型试验。为了克服现有盾构始发模型试验装置和方法的缺点与不足,实现倾斜面和倾斜角度可调的地面出入式盾构始发的模型试验,为现有的地面出入式盾构工程提供量化数据的支撑和指导,发明了可精确控制的双向倾斜地面出入式盾构始发模型试验装置。
发明内容
为了克服现有盾构始发模型试验装置不适用于地面出入式盾构始发模型试验、缺乏精确的电控手段、人工操纵的误差较大以及盾构模型试验过程中盾构机推进轴线易发生偏差的缺点与不足,实现倾斜面和倾斜角可调、调节过程精确可靠的地面出入式盾构始发的模型试验,为现有的地面出入式盾构工程提供量化的数据的支撑和指导,本发明提供了一种可精确控制的双向倾斜地面出入式盾构始发模型试验装置,能够有效的克服上述盾构始发模型试验装置的不足,可以应用于任意角度和倾斜面的地面出入式盾构始发模型试验,且角度调节操作自动化程度高、简洁明了。
本发明解决其技术问题所采用的技术方案是:
一种可精确控制的双向倾斜地面出入式盾构始发模型试验装置,包括模型箱、土体、水平导轨、第一行车、第二行车、第三行车、第四行车、第一垂直丝杆升降机、第二垂直丝杆升降机、第三垂直丝杆升降机、第四垂直丝杆升降机、第一垂直丝杆、第二垂直丝杆、第三垂直丝杆、第四垂直丝杆、自由转轴、第一水平丝杆、第二水平丝杆、第三水平丝杆、第四水平丝杆、第一水平丝杆升降机、第二水平丝杆升降机、第三水平丝杆升降机、第四水平丝杆升降机、盾构机轨道、模型盾构机、盾构反力系统、反力系统导轨、螺栓孔位、盾构反力板、反力板固定螺栓、盾构角度稳定系统、固定螺栓、弧形框架、手柄、限位挡板、角度稳定挡板、弹簧、刀盘、盾体、盾尾、液压千斤顶、螺纹和电动齿轮;
所述模型箱放置于坚硬平整的场地上;土体放置于模型箱内;水平导轨与模型箱固定连接;第一行车、第二行车、第三行车、第四行车与水平导轨通过卡槽连接,并均可沿着水平导轨滑动;第一垂直丝杆升降机与第一行车固定连接;第二垂直丝杆升降机与第二行车固定连接;第三垂直丝杆升降机与第三行车固定连接;第四垂直丝杆升降机与第四行车固定连接;第一垂直丝杆与第一垂直丝杆升降机通过螺纹连接,与第一水平丝杆升降机通过自由转轴连接,并可由第一垂直丝杆升降机控制升降;第二垂直丝杆与第二垂直丝杆升降机通过螺纹连接,与第二水平丝杆升降机通过自由转轴连接,并可由第二垂直丝杆升降机控制升降;第三垂直丝杆与第三垂直丝杆升降机通过螺纹连接,与第三水平丝杆升降机通过自由转轴连接,并可由第三垂直丝杆升降机控制升降;第四垂直丝杆与第四垂直丝杆升降机通过螺纹连接,与第四水平丝杆升降机通过自由转轴连接,并可由第四垂直丝杆升降机控制升降;第一水平丝杆与第一水平丝杆升降机通过螺纹连接,与盾构机轨道固定连接;第二水平丝杆与第二水平丝杆升降机通过螺纹连接,与盾构机轨道固定连接;第三水平丝杆与第三水平丝杆升降机通过螺纹连接,与盾构机轨道固定连接;第四水平丝杆与第四水平丝杆升降机通过螺纹连接,与盾构机轨道固定连接;第一水平丝杆升降机与第一垂直丝杆通过自由转轴连接,与第一水平丝杆通过螺纹连接;第二水平丝杆升降机与第二垂直丝杆通过自由转轴连接,与第二水平丝杆通过螺纹连接;第三水平丝杆升降机与第三垂直丝杆通过自由转轴连接,与第三水平丝杆通过螺纹连接;第四水平丝杆升降机与第四垂直丝杆通过自由转轴连接,与第四水平丝杆通过螺纹连接;盾构机轨道与第一水平丝杆、第二水平丝杆、第三水平丝杆、第四水平丝杆固定连接;模型盾构机放置于盾构机轨道的凹槽内,并与凹槽紧贴;反力系统导轨与盾构机轨道固定连接;螺栓孔位位于反力系统导轨内;盾构反力板与反力系统导轨通过卡槽连接,并通过反力板固定螺栓旋入螺栓孔位固定;弧形框架与盾构机轨道通过固定连接;限位挡板与手柄固定连接;角度稳定挡板与手柄固定连接;弹簧套在手柄外部;液压千斤顶与盾尾固定连接;螺纹位于水平导轨上;电动齿轮嵌于第一水平行车、第二行车、第三行车和第四行车的内表面上。
进一步,所述水平导轨与模型箱通过热焊连接。
再进一步,第一垂直丝杆升降机与第一行车通过焊接连接;第二垂直丝杆升降机与第二行车通过焊接连接;第三垂直丝杆升降机与第三行车通过焊接连接;第四垂直丝杆升降机与第四行车通过焊接连接。
更进一步,第一水平丝杆与盾构机轨道通过焊接连接;第二水平丝杆与盾构机轨道通过焊接连接;第三水平丝杆与盾构机轨道通过焊接连接;第四水平丝杆与盾构机轨道通过焊接连接。
反力系统导轨与盾构机轨道通过焊接连接,弧形框架与盾构机轨道通过固定螺栓连接;限位挡板与手柄通过焊接连接;角度稳定挡板与手柄通过焊接连接;液压千斤顶与盾尾通过焊接连接。
本发明中的盾构始发角度包括水平始发角度和垂直始发角度,试验过程中首先调节水平始发角度,然后再调节垂直始发角度。水平始发角度通过控制四个行车在水平导轨上的位移、四根水平丝杆的伸缩来实现,垂直始发角度通过控制四个行车在水平导轨上的位移、四根垂直丝杆在铅垂方向的升降、四根水平丝杆的伸缩来实现。在水平始发角度调整中四个行车的位移分别用x
本发明的有益效果主要表现在:(1)能实现两个倾斜面的任意倾斜角度地面出入式盾构始发模型试验。本系统采用了丝杆升降机、行车等设备,可以使盾构机轴线在水平面和垂直面内任意调整,充分考虑了地面出入式盾构在各种复杂工况下的工程实际,真正实现了任意倾斜角度的地面出入式盾构始发模型试验。(2)自动化程度高,操作简洁。本系统所使用的丝杆升降机、行车等装置完全通过可以实现角度实时计算和操控的微电脑控制,仅需在试验前输入盾构始发轴线中心点、倾斜角度等参数,后续丝杆升降机、行车的操控均由微电脑完成,其盾构始发角度可以实时在微电脑屏幕上显示。(3)本系统提出了盾构角度稳定系统,有效防止了模型盾构机在试验中脱离轨道,保证了试验的精度与可靠性。(4)角度控制精准。本系统的角度调节过程完全通过微电脑控制、电能驱动,避免了油压控制等控制方法导致的系统误差、减少了人工调节的偶然误差,使得试验结果更为精确,同时还提高了模型试验过程中的安全性,可在一定程度上减小实验事故发生的可能性。
附图说明
图1是可精确控制的双向倾斜地面出入式盾构始发模型试验装置的示意图。
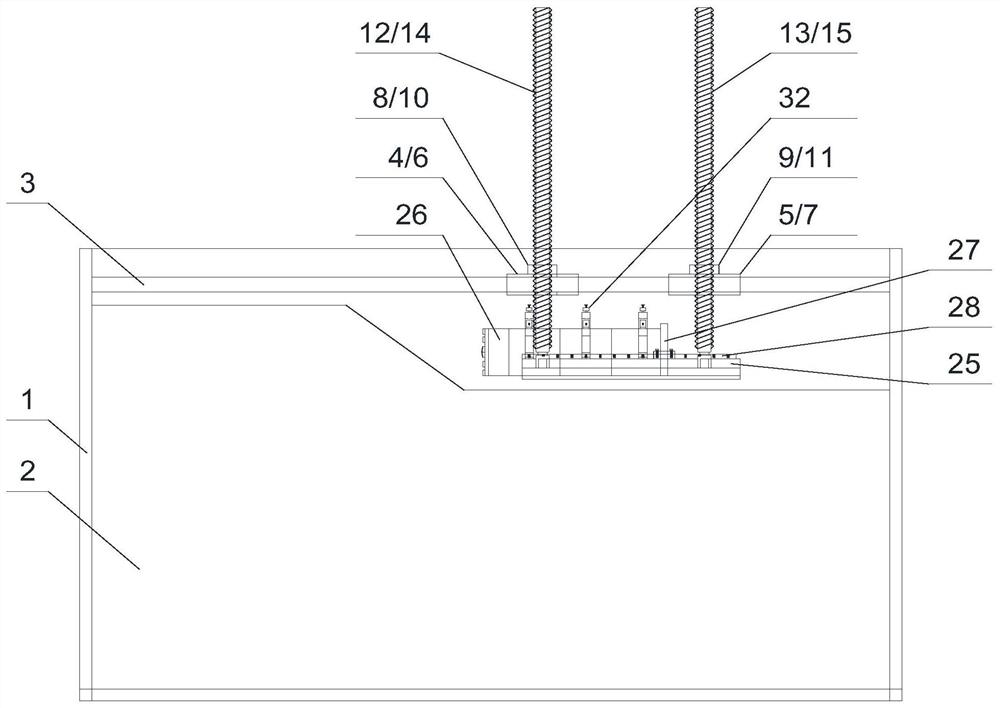
图2是可精确控制的双向倾斜地面出入式盾构始发模型试验装置的左视图。
图3是可精确控制的双向倾斜地面出入式盾构始发模型试验装置的结构图。
图4是角度调节系统的示意图。
图5是盾构反力系统的示意图,其中,(a)是主视图,(b)是左视图。
图6是盾构角度稳定系统的示意图,其中,(a)是主视图,(b)是左视图,(c)是盾构限位器。
图7是模型盾构机的示意图,其中,(a)是主视图,(b)是左视图。
图8是水平导轨和水平行车的示意图,其中,(a)是主视图,(b)是左视图,(c)是垂直丝杠升降机。
图9是水平角度调整步骤的示意图
图10是垂直角度调差步骤的示意图
图11是操作方法的步骤示意,其中,(a)是试验开始,(b)是铺设土体和开挖土体。
图12是操作方法的步骤示意,其中,(a)是安装反力板,(b)是安装模型盾构机。
图13是横向定位的示意图。
图14是操作方法的步骤示意,其中,(a)是水平角度调整,(b)是垂直定位。
图15是操作方法的步骤示意,其中,(a)是垂直角度调整,(b)是盾构推进。
图16是操作方法的步骤示意,其中,(a)是反力板前移,(b)是反复操作。
图17是可精确控制的双向倾斜地面出入式盾构始发模型试验装置的操作状态示意图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1~图17,一种可精确控制的双向倾斜地面出入式盾构始发模型试验装置,包括模型箱1、土体2、水平导轨3、第一行车4、第二行车5、第三行车6、第四行车7、第一垂直丝杆升降机8、第二垂直丝杆升降机9、第三垂直丝杆升降机10、第四垂直丝杆升降机11、第一垂直丝杆12、第二垂直丝杆13、第三垂直丝杆14、第四垂直丝杆15、自由转轴16、第一水平丝杆17、第二水平丝杆18、第三水平丝杆19、第四水平丝杆20、第一水平丝杆升降机21、第二水平丝杆升降机22、第三水平丝杆升降机23、第四水平丝杆升降机24、盾构机轨道25、模型盾构机26、盾构反力系统27、反力系统导轨28、螺栓孔位29、盾构反力板30、反力板固定螺栓31、盾构角度稳定系统32、固定螺栓33、弧形框架34、手柄35、限位挡板36、角度稳定挡板37、弹簧38、刀盘39、盾体40、盾尾41、液压千斤顶42、螺纹43和电动齿轮44。
所述模型箱1放置于坚硬平整的场地上;土体2放置于模型箱1内;水平导轨3与模型箱1通过热焊连接;第一行车4、第二行车5、第三行车6、第四行车7与水平导轨3通过卡槽连接,并均可沿着水平导轨3滑动;第一垂直丝杆升降机8与第一行车4通过焊接连接;第二垂直丝杆升降机9与第二行车5通过焊接连接;第三垂直丝杆升降机10与第三行车6通过焊接连接;第四垂直丝杆升降机11与第四行车7通过焊接连接;第一垂直丝杆12与第一垂直丝杆升降机8通过螺纹连接,与第一水平丝杆升降机21通过自由转轴16连接,并可由第一垂直丝杆升降机8控制升降;第二垂直丝杆13与第二垂直丝杆升降机9通过螺纹连接,与第二水平丝杆升降机22通过自由转轴16连接,并可由第二垂直丝杆升降机9控制升降;第三垂直丝杆14与第三垂直丝杆升降机10通过螺纹连接,与第三水平丝杆升降机23通过自由转轴16连接,并可由第三垂直丝杆升降机10控制升降;第四垂直丝杆15与第四垂直丝杆升降机11通过螺纹连接,与第四水平丝杆升降机24通过自由转轴16连接,并可由第四垂直丝杆升降机11控制升降;第一水平丝杆17与第一水平丝杆升降机21通过螺纹连接,与盾构机轨道25通过焊接连接;第二水平丝杆18与第二水平丝杆升降机22通过螺纹连接,与盾构机轨道25通过焊接连接;第三水平丝杆19与第三水平丝杆升降机23通过螺纹连接,与盾构机轨道25通过焊接连接;第四水平丝杆20与第四水平丝杆升降机24通过螺纹连接,与盾构机轨道25通过焊接连接;第一水平丝杆升降机21与第一垂直丝杆12通过自由转轴16连接,与第一水平丝杆17通过螺纹连接;第二水平丝杆升降机22与第二垂直丝杆13通过自由转轴16连接,与第二水平丝杆18通过螺纹连接;第三水平丝杆升降机23与第三垂直丝杆14通过自由转轴16连接,与第三水平丝杆19通过螺纹连接;第四水平丝杆升降机24与第四垂直丝杆15通过自由转轴16连接,与第四水平丝杆20通过螺纹连接;盾构机轨道25与第一水平丝杆17、第二水平丝杆18、第三水平丝杆19、第四水平丝杆20通过焊接连接;模型盾构机26放置于盾构机轨道25的凹槽内,并与凹槽紧贴;反力系统导轨28与盾构机轨道25通过焊接连接;螺栓孔位29位于反力系统导轨28内,通过钻孔得到;盾构反力板30与反力系统导轨28通过卡槽连接,并通过反力板固定螺栓31旋入螺栓孔位29固定;弧形框架34与盾构机轨道26通过固定螺栓33连接;限位挡板36与手柄35通过焊接连接;角度稳定挡板37与手柄35通过焊接连接;弹簧38套在手柄36外部;液压千斤顶42与盾尾41通过焊接连接;螺纹43位于水平导轨3上;电动齿轮44嵌于第一水平行车4、第二行车5、第三行车6和第四行车7的内表面上。
某地面出入式盾构始发工程,采用一台φ6380mm GPST专用土压平衡盾构施工,盾构推进步长(环宽)为1.2m,工程勘察得到的土层参数如表1所示。目前工程处于设计阶段,需要设计地面出入式盾构始发轴线的水平角度和垂直角度,为了寻求施工质量与经济效益的平衡,揭示最优的盾构始发轴线,开展一系列地面出入式盾构始发模型试验。而传统的盾构模型试验装置无法满足地面出入式盾构模型试验始发的实际要求,采用可精确控制的双向倾斜地面出入式盾构始发模型试验装置可以方便、快速、精确地实现倾斜面和倾斜角精确可调的地面出入式盾构模型试验始发的要求。
表1
本发明的实施方案是:
(a)根据地面出入式盾构始发工程的实际情况和场地条件,确定缩尺比例为1:20,确定土层参数如表2所示,确定试验方案如表3所示,选用直径为320mm、长度为1200mm的模型盾构机26。为了消除边界效应的影响,选用长a=6000mm、宽b=3000mmm、高h=3000mm的盾构模型箱1,水平导轨3距模型箱1顶部200mm。
(b)铺设土体。根据试验方案要求的土层信息铺设土体2,土体2高度为1800mm,土层设置如表2所示,土样均取自工程施工现场。如图所示,在铺设土体的同时,在预计的推进轴线两侧设置土压力盒,并在土体上部设置位移传感器,用于测量试验过程中的土体内部应力和位移的变化。
表2
(c)根据地面出入式盾构始发模型试验的试验方案,向微电脑中输入盾构始发轴线中心点坐标(3000,0,1000)(以图中盾构试验箱内水平导轨平面、长度方向最右侧、宽度方向中心的位置作为坐标原点,长度方向为X轴,宽度方向为Y轴,深度方向为Z轴)、水平倾斜角度、垂直倾斜角度,试验方案如表3所示。
表3
(d)微电脑经过计算,得出水平始发角度调整中四个行车的位移x
(e)开挖土体。根据表3实施例试验方案中所示的当前试验的倾斜角度开挖土体2,使得土体2形成一个坡脚靠近始发侧,坡顶靠近到达侧的坡度,符合试验的需要。
(f)向微电脑确认各项参数,模型试验开始。
(g)装置复位。微电脑操纵第一行车4、第二行车5、第三行车6、第四行车7上的电动齿轮44,使第一行车4、第二行车5、第三行车6、第四行车7回位至初始位置,操纵丝杆升降机8、9、10、11将垂直丝杆12、13、14、15回位至初始位置,操纵水平丝杆升降机21、22、23、24将水平丝杆17、18、19、20回位至初始位置。
(h)安装盾构反力系统27至反力系统导轨28上,锁紧反力板固定螺栓31。
(i)安装模型盾构机26。将模型盾构机26放置到盾构机轨道25的尾部,并使模型盾构机26紧贴盾构机轨道25,并在安装时调整手柄35,使得盾构角度稳定系统32中的角度稳定挡板37紧贴模型盾构机26的盾体40,保证盾构推进过程中模型盾构机26不发生偏差。
(j)横向定位。向微电脑下达横向定位指令,微电脑进入横向定位步骤。此时微电脑操纵第一行车4、第二行车5、第三行车6、第四行车7上的电动齿轮44,使第一行车4、第二行车5、第三行车6、第四行车7沿着水平导轨3位移至指定位置。
(k)水平角度调整。微电脑自动进入水平角度调整阶段,此时微电脑控制第一行车4、第二行车5、第三行车6、第四行车7上的电动齿轮44,使第一行车4、第二行车5、第三行车6、第四行车7沿着水平导轨3水平位移,控制第一水平丝杆升降机21、第二水平丝杆升降机22、第三水平丝杆升降机23、第四水平丝杆升降机24使第一水平丝杆17、第二水平丝杆18、第三水平丝杆19、第四水平丝杆20伸缩,其位移和伸缩量由微电脑实时计算并控制。
(l)纵向定位。微电脑自动进入纵向定位阶段,此时微电脑控制第一垂直丝杆升降机8、第二垂直丝杆升降机9、第三垂直丝杆升降机10、第四垂直丝杆升降机11,使第一垂直丝杆12、第二垂直丝杆13、第三垂直丝杆14、第四垂直丝杆15下降,使得模型盾构机26前端刀盘39紧贴土体2。
(m)垂直角度调整。微电脑自动进入垂直角度调整阶段,此时微电脑同时控制第一行车4、第二行车5、第三行车6、第四行车7上的电动齿轮44,第一垂直丝杆升降机8、第二垂直丝杆升降机9、第三垂直丝杆升降机10、第四垂直丝杆升降机11,第一水平丝杆升降机21、第二水平丝杆升降机22、第三水平丝杆升降机23、第四水平丝杆升降机24,使盾构机轨道25在铅垂平面内倾斜,直至达到预先输入的垂直倾斜角度。
(n)盾构推进。定位和角度调整完成,微电脑暂停工作。启动模型盾构机26上的刀盘39和液压千斤顶42,开始盾构推进。
(o)待盾构推进至液压千斤顶42的一个行程时,关闭刀盘39和液压千斤顶42。
(p)释放油压,缩回液压千斤顶42。
(q)松开反力板固定螺栓31,将盾构反力板30沿着反力系统导轨28向前移动一个行程,重新紧贴液压千斤顶42,锁紧反力板固定螺栓31。
(r)重复进行步骤(n)-(q),直至模型盾构机26完全进入土体2。
(s)关闭刀盘39和液压千斤顶42,采集相关数据。
(t)移除模型盾构机26,向微电脑下达试验结束指令,微电脑控制第一行车4、第二行车5、第三行车6、第四行车7上的电动齿轮44,第一垂直丝杆升降机8、第二垂直丝杆升降机9、第三垂直丝杆升降机10、第四垂直丝杆升降机11,第一水平丝杆升降机21、第二水平丝杆升降机22、第三水平丝杆升降机23、第四水平丝杆升降机24,使盾构机轨道25恢复至初始位置。
(u)松开反力板固定螺栓31,移除盾构反力板30,一个试验周期结束。
(v)根据试验方案,重复步骤(b)-(u),完成表3所述的所有试验,对试验数据进行分析和总结,归纳出应力和沉降符合施工质量要求的方案,并对这些方案进行经济性评估,最终揭示最优的盾构始发角度,指导隧道的设计与施工。
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
- 可精确控制的双向倾斜地面出入式盾构始发模型试验装置的操作方法
- 可精确控制的双向倾斜地面出入式盾构始发模型试验装置