基于地图和传感器数据的天线优化
文献发布时间:2023-06-19 11:32:36
技术领域
本公开涉及一种用于优化车辆传感器的天线波束的系统。
背景技术
典型的车辆网(V2X)或车辆到车辆(V2V)收发机采用水平全向天线波束来在所有情况下保持等同地知晓所有方向上的其他车辆、结构和物体。
所提出的对全向天线波束的一种变型使用地图数据来确定道路构造(例如,双向分隔高速公路)并调整波束以朝向车辆的前方和后方。波束还可以在全球导航卫星系统(GNSS)数据指示车辆正接近交叉路口时切换至全向模式。车辆传感器数据可用于在刹车或变道时调整天线波束。
上述系统还可动态地使波束转向以便在检测到感兴趣物体时锁定到该物体上。以此方式,一个或多个V2X传感器的波束可以持续地成形以跟踪物体。
所提出的另一种办法使用车辆相机来确定车辆何时处于城市峡谷中并相应地调整GNSS天线图型。
发明内容
在一个示例性实施例中,一种优化用于车辆的传感器天线的方法包括使用来自多个预定天线波束图型中的第一预定天线波束图型来操作传感器天线。确定车辆的地图位置,并且基于该车辆的地图位置来从该多个预定天线波束图型中选择第二预定天线波束图型。该第二预定天线波束图型然后用于车辆传感器。
在上述实施例的进一步实施例中,地图位置确定步骤包括接收车辆的GNSS数据。
在上述任一实施例的进一步实施例中,地图位置确定步骤包括通过参考防抱死制动系统数据、惯性测量单元数据、车轮旋转数据、车辆速度数据和/或转向数据中的至少一者来推断出地图位置。
在上述任一实施例的进一步实施例中,传感器天线是V2X传感器天线、V2V传感器天线、V2I传感器天线、V2P传感器天线、V2N传感器天线、C-V2X传感器天线、C-V2V传感器天线、C-V2I传感器天线、C-V2P传感器天线和/或C-V2N传感器天线。
在上述任一实施例的进一步实施例中,该多个预定天线波束图型不包括全向天线波束图型和转向或瞬态天线波束图型。
在上述任一实施例的进一步实施例中,地图位置确定步骤包括确定情境性车辆环境。
在上述任一实施例的进一步实施例中,该情境性车辆环境与瞬时(transitory)车辆状况相关。
在上述任一实施例的进一步实施例中,该瞬时车辆状况与车辆周围的物体拥挤相关。
在上述任一实施例的进一步实施例中,第一预定天线图型在第一瞬时车辆状况中使用。第二预定天线图型在第二瞬时车辆状况中使用。
在上述任一实施例的进一步实施例中,该瞬时车辆状况基于来自高速公路、交叉路口、桥梁、隧道和/或交通信号中的至少一者的转变来确定。
在上述任一实施例的进一步实施例中,该瞬时车辆状况是未定车辆状况。第二预定天线波束图型是全向天线波束图型。
在上述任一实施例的进一步实施例中,该情境性车辆环境与车辆障碍物的量相关。该多个天线波束图型与跟城市状况和乡村状况相关联的地图位置相关。
在上述任一实施例的进一步实施例中,传感器天线是GNSS传感器天线。
在上述任一实施例的进一步实施例中,相比于第一预定天线波束图型,用于城市状况的第二预定天线波束图型向上聚焦以避免来自建筑物的多路反射。
在上述任一实施例的进一步实施例中,相比于第一预定天线波束图型,用于城市状况的第二预定天线波束图型提供朝向直接可见卫星的增加的增益,而不管GNSS星历数据中的较低海拔卫星。
在上述任一实施例的进一步实施例中,相比于使用与用于GNSS传感器天线的天线阵列不同的一个或多个天线的第一预定天线波束图型,用于乡村状况的第二预定天线波束图型包括使用该阵列来增加朝向地平线的包容性。
在上述任一实施例的进一步实施例中,城市状况和乡村状况基于车辆周围的横向障碍物的量来彼此区分。
在上述任一实施例的进一步实施例中,横向障碍物在车辆的100码内。
在上述任一实施例的进一步实施例中,横向障碍物遮挡第一预定波束图型的至少25%。
在上述任一实施例的进一步实施例中,控制器被编程为执行车辆传感器天线优化步骤。
附图说明
本公开能够在与所附附图相结合地考虑时通过参考一下具体实施方式来进一步理解,在附图中:
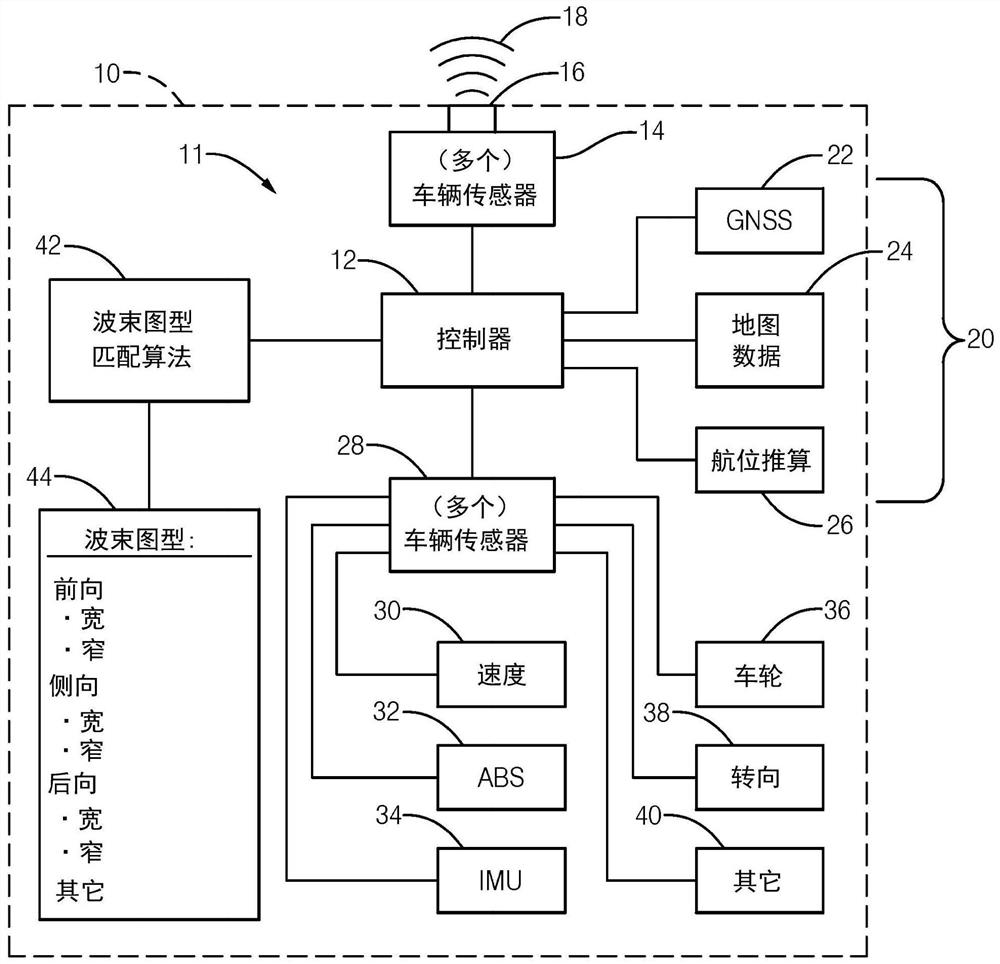
图1是用于调整车辆传感器的波束图型的示例系统的示意图。
图2是描绘示例波束图型匹配算法的流程图。
图3示出了一个示例波束图型。
图4示出了另一个示例波束图型。
图5示出了用于交叉路口的示例波束图型。
图6示出了用于车辆失控状况的全向波束图型。
前述段落、权利要求书或以下描述和附图的实施例、示例和替代方案,包括它们的各个方面或相应的单个特征中的任何一个,可以独立地或以任何组合来采用。结合一个实施例描述的特征适用于所有实施例,除非这些特征不兼容。各个附图中相同的附图标记和命名指示相同的要素。
具体实施方式
示例车辆系统10在图1中示意性地示出。系统10包括与提供驾驶员辅助特征的各种组件通信的控制器12。控制器12可包括可以是单独或集成单元的一个或多个处理器。
一个或多个车辆传感器14与控制器12通信并且包括V2X、V2V、V2I、V2P、V2N、C-V2X、C-V2V、C-V2I、C-V2P和/或C-V2N收发机中的至少一者(该至少一个传感器通常被统称为“V2X”),该一个或多个车辆传感器包括用于与车辆的周遭环境进行交互式通信的天线16。天线16使用信号18来向周遭环境发送数据和/或从周遭环境接收数据。车辆传感器14或车辆传感器集合可被配置成提供预配置的固定波束图型。可存在其他车辆传感器,诸如LIDAR、超声传感器和/或摄像机。
车辆位置可使用一个或多个导航系统20来被提供给控制器12,该一个或多个导航系统20包括全球导航卫星系统(GNSS)22、地图数据24和/或航位推算26。车辆地图位置基于从GNSS系统22的天线接收到的数据来确定。导航系统20可以与车辆传感器14一起工作以便将车辆的位置与例如相对于地图数据24的地图上的位置关联。地图数据24可包括诸如以下之类的信息:海拔、建筑物位置和尺寸、道路类型、车道位置、立交桥、交叉路口和/或其他有用的环境信息。
V2X收发机和GNSS系统中的每一者中所使用的天线可由单个天线或天线阵列来提供。这些天线可以按提供所需波束图型的方式来操作。由此,如在本公开中使用的“天线”旨在包括以协调方式操作以实现用于设备的所需波束图型的一个或多个天线。
控制器12还与各种其他车辆传感器28通信,这些传感器协作以帮助驾驶员操作车辆,诸如提供刹车辅助、转向辅助和自动化巡航控制。车辆传感器28通过车辆CAN总线提供信号,诸如车辆速度30、ABS数据32、惯性测量单元(IMU)数据34、车轮数位标记(wheeltick)36、转向数据38和/或其他信息40。可以在车辆10中提供各种其他辅助或控制系统以提供改进的车辆性能和/或安全性。如果需要,则可通过参考这些车辆传感器28中的一者或多者来推断出车辆地图位置和/或地图数据。
根据本公开,通过基于地图和/或传感器数据调整一个或多个天线的图型来解决次优V2X和/或GNSS天线图型的问题。例如,当地图数据指示高速公路驾驶正在进行中时,天线图型将被聚焦至较窄的、较高增益的前向和后向图型,该图型由于缺少侧向危险而将极少增益“浪费”在车辆侧面(图3)。相比于现有全向天线,该天线图型在高速公路速度下提供更大的通信范围。
控制器12使用波束图型匹配算法42(图2)来从包括用于(多个)车辆传感器14的天线16的多个预定天线波束图型的菜单44中选择一固定波束图型。该多个预定天线波束图型不包括全向天线波束图型以及转向或瞬态天线波束图型。该固定波束图型基于相对于地图数据24的车辆位置来选择。天线波束图型可被优化成基于地图数据24来将发射和接收功率聚焦于感兴趣区域。可选的固定波束图型扩展感兴趣区域内的通信范围,同时忽略不具有感兴趣目标的区域。这还可改进跨车辆中的多个无线电的共存性。
该共存问题通过针对应用优化波束图型以由此最小化无线电之间的干扰来改善。例如,当地图指示车辆正接近缴费广场时或者当检测到来自缴费广场的通信时,被指派用于与缴费广场进行无线电通信的天线可被非常窄地聚焦于广场天线(图4),由此减少对与车辆或其他基础设施通信的其他无线电的干扰。一般而言,与车辆上的多个全向天线相比,同一车辆上的多个定向天线(经优化波束)可减少无线电之间的干扰。
类似地,固定天线波束图型可被应用于GNSS天线。可选的GNSS图型最小化城市峡谷或市中心区域中的多路效应,同时在天空开阔场景中最大化卫星可见度。即,地图数据24包括与针对地图位置的卫星可见度相关的信息,该信息使波束图型匹配算法能够选择所需波束图型。
当相对于地图数据24的车辆位置无法通过诸如GNSS 24之类的车辆导航系统来辨别时,车辆位置可通过车辆传感器28(例如,信息30-40)来辨别。例如,高速、直道驾驶或巡航控制使用可指示很有可能是天空开阔的高速公路驾驶。低速、走走停停驾驶可指示可具有GNSS卫星阻塞的城市区域。转向信号使用可指示即将到来的交叉路口。当可用时,LIDAR数据提供对车辆周遭环境的更准确的调查。
在操作中,车辆传感器天线(即,V2X天线和/或GNSS天线)在其使用期间被优化,如图2所示的流程图中的42通常指示的。传感器天线在第一操作模式期间使用来自多个预定天线波束图型的第一预定天线波束图型。接收车辆位置信息(框46),并且在车辆操作期间直接通过导航系统确定或通过车辆传感器28推断地确定车辆的地图位置(框48)。在第二操作模式期间基于车辆的地图位置来从该多个预定天线波束图型中选择第二预定天线波束图型(框50)。然后将该第二预定天线波束图型用于车辆传感器(52)。
如果地图位置无法通过车辆导航系统(例如,GNSS)来辨别,则参考车辆传感器28(框54)并且从车辆传感器数据中推断出地图位置/地图数据(框56)。如果推断出地图位置,则将来自菜单44的第二预定天线波束图型与车辆的地图位置相匹配(框50)并且将该天线波束图型部署到天线16(框52)。如果无法通过车辆传感器28来推断出地图位置,则可使用默认天线波束图型(框58;例如全向)直到能够直接或间接确定车辆位置。
在示例中,地图位置基于与瞬时车辆状况相关的情境性车辆环境来确定。波束图型之间的切换例如在车辆的周遭环境以使第一预定天线波束图型的有效性降级或者相对不如第二预定天线波束图型合乎需要的方式改变时进行。由此,第一预定天线图型在第一瞬时车辆状况中使用,并且第二预定天线图型在第二瞬时车辆状况中使用。
示例瞬时车辆状况包括车辆周围的物体拥挤和/或来自高速公路、交叉路口、桥梁、隧道和/或交通信号中的至少一者的转变。
高速通常需要更大的前向/后向范围。参照图3,对以反方向行驶的车辆不感兴趣。一般对车辆侧面的物体不感兴趣,因此用于地图数据中的高速公路的所需波束图型是窄前向和后向波束。
参照图4,当根据地图数据24正接近诸如缴费广场之类的基础设施时,V2I天线图型可以非常窄并且聚焦得比V2V天线更高。聚焦的图型允许更低的功率以及在无线电异步地操作的情况下(很有可能是在使用不止两个无线电的情况下)对V2V无线电的更小影响,由此改善共存性。
参照图5,在交叉路口,V2X天线图型将被加宽以增强去往/来自交叉道路上的车辆(即,从主车辆的左侧和右侧接近的车辆)的车辆通信。需要较宽的朝前看图型来“看见”周围的角落。后向图型可保持较窄且射程较长。通常在毗邻车辆的侧面不存在感兴趣的物体。可以在接近环岛时使用类似的波束图型。
当地图数据不可用时,可通过车辆传感器数据来辨别驾驶状况。例如,高速、直道驾驶可指示很有可能是天空开阔的并且缺少侧向危险的高速公路驾驶。可经由通过IMU、车轮数位标记或其他数据计算出的横摆率来确定的车辆转向可指示交叉路口。
在某些情况下,车辆传感器数据优先于地图数据,即使该地图数据可用。瞬时车辆状况可以是未定车辆状况。例如,在同样由横摆率或防抱死制动数据确定的失控情形中,使用全向天线图型。参照图6,在这一场景中,第二预定天线波束图型在瞬时车辆状况未定时是全向天线波束图型。失控例如通过车辆传感器(诸如ABS、IMU和/或车轮数位标记)来确定。
当车辆停止(如由GNSS、车轮数位标记或其它数据以及紧急闪灯状态确定)时,天线图型可基于对相对于道路交通样式的车辆朝向的置信度来确定。全向图型在车辆朝向无法被确定时使用。
在另一示例中,情境性车辆环境与车辆障碍物的量相关,并且该多个天线波束图型与跟城市状况和乡村状况相关联的地图位置相关。关于GNSS天线优化,当地图数据指示具有较高建筑物的城市区域时,增强GNSS性能。城市状况和乡村状况可以例如基于车辆周围的横向障碍物的量来彼此区分。在一个示例配置中,横向障碍物在车辆的100码内,而在另一示例配置中,横向障碍物遮挡第一预定波束图型的至少25%。
在城市区域中,很有可能是多路的较低海拔信号被忽略,并且天线被向上聚焦。第一,天线图型被向上聚焦以最小化来自建筑物的多路反射的影响,同时增加朝向直接可见卫星的增益。这例如可通过使用天线阵列来实现。第二,使用启发式算法来忽略GNSS星历(almanac)数据中的较低海拔卫星,因为来自这些卫星的任何信号将经由多路反射来接收,而不是直接接收。直接可见的卫星可基于地图数据库中的建筑物高度数据来确定。
在乡村区域中,朝向地平线的卫星可见度被最大化。例如,相比于使用与用于GNSS传感器天线的天线阵列不同的一个或多个天线的第一预定天线波束图型,用于乡村状况的第二预定天线波束图型包括使用该阵列来最大化朝向地平线的卫星可见度。单个贴片天线例如具有直接向上的相对较强的灵敏度,这对于乡村区域更有用。该单天线布置仍通过增加朝向地平线的包容性而具有良好的地平线向性能,而不降低重要的较高海拔灵敏度。当采用天线阵列时,生成较窄的向上波束,这在其中较低海拔卫星可能被建筑物遮挡的城市环境中更有用。
还应理解,尽管在所示实施例中公开了特定组件布置,但其他布置将受益于此。尽管特定步骤顺序被示出、描述且被要求保护,但应理解,除非另有说明,否则各步骤可以按任何次序、分开地或相组合地执行,并且仍将受益于本发明。
尽管不同示例具有各图示中示出的特定组件,但本发明的各实施例不限于这些特定组合。可以将来自这些示例中的一个示例的某些组件或特征与来自这些示例中的另一示例的特征或组件相结合地使用。
尽管已经公开了示例实施例,但本领域普通技术人员将认识到某些修改将来自各权利要求的范围。出于该原因,以下各权利要求将被研究以确定其真实范围和内容。
- 基于地图和传感器数据的天线优化
- 用神经网络基于传感器数据和地图数据的图像配准的定位