一种清洁机器人及其自动清洗方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于清洁机器人技术领域,尤其涉及一种清洁机器人及其自动清洗方法。
背景技术
目前,以现有技术中的云鲸智能科技(东莞)有限公司提出的清洁机器人和清洁机器人系统为例,其提出了一种对拖擦件实现清洗而使其进行地面清洁的功能。但是,其虽然配备了清水箱和污水箱对托擦件进行清洗,从而免除托擦件的人工操作,但是,每次清洗完的托擦件可进行清洁的面积有限,在一定时间内必须回到机座进行清洗,无法完全实现高续航的自动化作业。基于此,本次提出一种清洁机器人及其自动清洗方法。
发明内容
本发明的目的在于提供一种清洁机器人及其自动清洗方法,旨在解决所述背景技术中存在的问题。为实现所述目的,本发明采用的技术方案是:
一种清洁机器人,包括清洁机器人、以及能够为所述清洁机器人提供充电和/与换液的充电换液装置;
所述充电换液装置的包括外壳体、充电底座、清水储液箱和污水储液箱,所述充电底座设在外壳体的底部,所述清水储液箱和污水储液箱并排设在外壳体的上部;
所述清洁机器人收纳于所述充电底座的内部,所述充电底座的内侧上端面设有导向条,所述清洁机器人底部设有限位槽,所述导向条和限位槽配合将清洁机器人精准收纳在充电底座内部;
所述清洁机器人包括移动控制中台、清水箱、污水箱和清洁组件;
所述清水箱和污水箱设在清洁机器人内部,所述清水箱和污水箱通过换液组件与清水储液箱和污水储液箱实现液体交换;所述移动控制中台设在清洁机器人的上表面,所述清洁组件设在清洁机器人底部后端。
进一步的,所述换液组件包括固定板、电动丝杆、中间板和软胶头,所述电动丝杆顶端固定在固定板上,所述电动丝杆的底部丝杆与中间板螺纹连接,所述中间板底部设有连接清水箱和污水箱的软胶头,所述软胶头分别通过水管和水泵连接所述清水储液箱和污水储液箱。
进一步的,所述清洁机器人还包括行驶轮、万向轮和风机,所述行驶轮设有两个并依次设在清洁机器人的底部两侧,所述万向轮设置在所述清洁机器人底部前端,所述风机设在污水箱外侧,用于驱动污水箱吸取污水。
进一步的,所述清洁机器人外侧还设有防撞带,所述防撞带用于所述清洁机器人碰到障碍物时实现转向工作。
进一步的,所述清洁组件包括中刷基座、出水口、污水吸水口、第一中刷和第二中刷,所述第一中刷和第二中刷并排安装在中刷基座内,所述中刷基座的上部依次设有出水口和污水集水口。
进一步的,所述充电底座后端内凹形成清洗槽,所述清洗槽底部设有多个清洁凸起;所述固定座中部设有固定槽,所述固定槽用于固定行驶轮;所述固定座的前端设有向外扩展的导向翼,所述导向翼用于辅助所述清洗机器人回到所述充电底座。
进一步的,所述限位槽成“Y”字型设计,所述限位槽的尾端宽度大于所述导向条的宽度。
一种清洁机器人的自动清洗方法,所述自动清洗方法包括以下步骤:
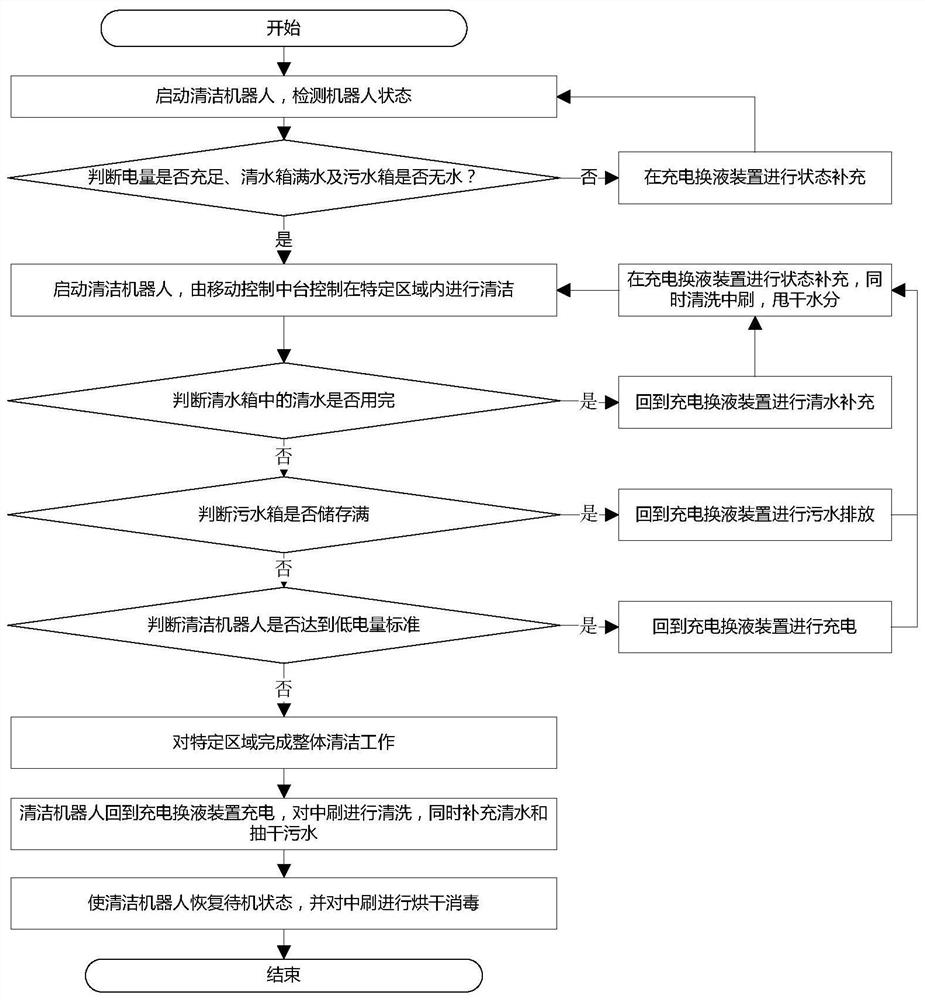
S1:用户通过遥控或充电换液装置上的控制面板启动所述清洁机器人,对清洁机器人的状态进行检测;
S2:判断清洁机器人的判断电量是否充足、清水箱是否满水及污水箱是否无水,若不满足上述条件,则通过充电换液装置对清洁机器人进行充电、补充清水和抽除污水;
S3:对清洁机器人补充完状态后,再次启动清洁机器人,由移动控制中台控制在特定区域内进行清洁工作;
S4:工作过程中,通过内置水位传感器判断清水箱中的清水是否用完,若是,则由移动控制中台控制清洁机器人回到充电换液装置进行清水补充,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人处于满电满清水无污水的状态,从而继续工作;
S5:工作过程中,通过内置水位传感器判断清水箱中的污水是否储满,若是,则由移动控制中台控制清洁机器人回到充电换液装置进行污水排放,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人处于满电满清水无污水的状态,从而继续工作;
S6:工作过程中,同时检测清洁机器人的电量是否达到低电量阈值标准,若是,则由移动控制中台控制清洁机器人回到充电换液装置进行充电,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人处于满电满清水无污水的状态,从而继续工作;
S7:清洁机器人重复S4-S6步骤,直至完成对特定区域内的整体清洁工作;
S8:清洁机器人回到充电换液装置充电,对中刷进行清洗,同时补充清水和抽干污水
S9:使清洁机器人恢复待机状态,并对中刷进行烘干消毒,完成一轮自动清洗工作。
本发明的有益效果:
1、通过设置自动化清洗模式,可一键实现清洁机器人的自动充电和/与换液操作;
2、清洗机器人自带清水箱和污水箱,可实现长时间清洗续航,不用时刻回到充电换液装置。
附图说明
图1为本发明实施例提供的清洁机器人清洗整体工作流程示意图;
图2为本发明实施例提供的清洁机器人整体结构示意图;
图3为本发明实施例提供的清洁机器人拆分结构示意图;
图4为本发明实施例提供的换液组件结构示意图;
图5为本发明实施例提供的充电底座内部结构示意图;
图6为本发明实施例提供的清洁机器人底部结构示意图;
图7为本发明实施例提供的A处放大结构示意图;
图8为本发明实施例提供的清洁机器人拆分结构示意图;
图9为本发明实施例提供的清洁机器人内部结构示意图;
图10为本发明实施例提供的清洁组件结构示意图。
其中,图中各附图标记:
1、充电换液装置;2、清洗机器人;11、充电底座;111、导向条;112、清洁凸起;113、清洗槽;114、固定槽;115、导向翼;12、清水储液箱;13、污水储液箱;14、换液组件;141、固定板;142、电动丝杆;143、中间板;144、软胶头;15、外壳体;2、清洁机器人;21、限位槽;22、行驶轮;23、万向轮;24、清洁组件;241、出水口;242、污水吸水口;243、第一中刷;244、第二中刷;245、中刷基座;25、风机;26、移动控制中台;27、防撞带;28、清水箱;29、污水箱。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,本文所使用的术语“上端”、“下端”、“左侧”、“右侧”、“前端”、“后端”以及类似的表达是参考附图的位置关系。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
如图1-10所示,本发明实施例提供了一种清洁机器人,包括清洁机器人2、以及能够为清洁机器人2提供充电和/与换液的充电换液装置1;
充电换液装置1的包括外壳体15、充电底座11、清水储液箱12和污水储液箱13,充电底座11设在外壳体15的底部,清水储液箱12和污水储液箱13并排设在外壳体15的上部;
清洁机器人2收纳于充电底座11的内部,充电底座11的内侧上端面设有导向条111,清洁机器人2底部设有限位槽21,导向条111和限位槽21配合将清洁机器人2精准收纳在充电底座11内部;
清洁机器人2包括移动控制中台26、清水箱28、污水箱29和清洁组件24;
清水箱28和污水箱29设在清洁机器人2内部,清水箱28和污水箱29通过换液组件14与清水储液箱12和污水储液箱13实现液体交换;移动控制中台26设在清洁机器人2的上表面,清洁组件24设在清洁机器人2底部后端。
在本具体实施例中,换液组件14包括固定板141、电动丝杆142、中间板143和软胶头144,电动丝杆142顶端固定在固定板141上,电动丝杆142的底部丝杆与中间板143螺纹连接,中间板143底部设有连接清水箱28和污水箱29的软胶头144,软胶头144分别通过水管和水泵连接清水储液箱12和污水储液箱13。电动丝杆142启动时,驱动中间板143上下移动,从而实现软胶头144与清水箱28和污水箱29的连通。
在本具体实施例中,清洁机器人2还包括行驶轮22、万向轮23和风机25,行驶轮22设有两个并依次设在清洁机器人2的底部两侧,万向轮23设置在清洁机器人2底部前端,风机25设在污水箱29外侧,用于驱动污水箱29吸取污水。
在本具体是实施例中,清洁机器人2外侧还设有防撞带27,防撞带27用于清洁机器人2碰到障碍物时实现转向工作。
在本具体实施例中,清洁组件24包括中刷基座245、出水口241、污水吸水口242、第一中刷243和第二中刷244,第一中刷243和第二中刷244并排安装在中刷基座245内,中刷基座245的上部依次设有出水口241和污水吸水口242。
在本具体实施例中,充电底座11后端内凹形成清洗槽113,清洗槽113底部设有多个清洁凸起112;固定座中部设有固定槽114,固定槽114用于固定行驶轮22;固定座的前端设有向外扩展的导向翼115,导向翼115用于辅助清洗机器人回到充电底座11。
在本具体实施例中,限位槽21成“Y”字型设计,限位槽21的尾端宽度大于导向条111的宽度。
一种清洁机器人的自动清洗方法,自动清洗方法包括以下步骤:
S1:用户通过遥控或充电换液装置1上的控制面板启动上述清洁机器人2,对清洁机器人2的状态进行检测;
S2:判断清洁机器人2的判断电量是否充足、清水箱28是否满水及污水箱29是否无水,若不满足上述条件,则通过充电换液装置1对清洁机器人2进行充电、补充清水和抽除污水;
S3:对清洁机器人2补充完状态后,再次启动清洁机器人2,由移动控制中台26控制在特定区域内进行清洁工作;
S4:工作过程中,通过内置水位传感器判断清水箱28中的清水是否用完,若是,则由移动控制中台26控制清洁机器人2回到充电换液装置1进行清水补充,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人2处于满电满清水无污水的状态,从而继续工作;
S5:工作过程中,通过内置水位传感器判断清水箱28中的污水是否储满,若是,则由移动控制中台26控制清洁机器人2回到充电换液装置1进行污水排放,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人2处于满电满清水无污水的状态,从而继续工作;
S6:工作过程中,同时检测清洁机器人2的电量是否达到低电量阈值标准,若是,则由移动控制中台26控制清洁机器人2回到充电换液装置1进行充电,同时对中刷进行清洗,清洗完毕后,甩干中刷的水分,同时也保证清洁机器人2处于满电满清水无污水的状态,从而继续工作;
S7:清洁机器人2重复S4-S6步骤,直至完成对特定区域内的整体清洁工作;
S8:清洁机器人2回到充电换液装置1充电,对中刷进行清洗,同时补充清水和抽干污水
S9:使清洁机器人2恢复待机状态,并对中刷进行烘干消毒,完成一轮自动清洗工作。
本发明的有益效果:
1、通过设置自动化清洗模式,可一键实现清洁机器人的自动充电和/与换液操作;
2、清洗机器人自带清水箱和污水箱,可实现长时间清洗续航,不用时刻回到充电换液装置。
以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
- 一种清洁机器人及其自动清洗方法
- 一种清洁机器人及自动清洗方法