一种打桩及架梁一体机
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及桥梁施工领域,具体涉及一种打桩及架梁一体机。
背景技术
目前在水上桥梁施工一般采用PHC或钢管桩进行桥墩的桩基施工,传统工艺是铺设临时施工便道或者架设栈桥或者水上使用打桩船,进行管桩打设。但是在自然保护区、沼泽、滩涂、长周期波临海施工、山涧以及城市建成区,因环境保护的硬性约束、空间受限、地质环境复杂等原因不具备搭设施工便道的条件,无法利用现有架桥机和采用常规工艺完成桥梁的桥墩施工。为克服以上限制条件满足施工需求,需要对现有架桥机进行技术改进。或者设计一种新型打桩、架桥一体机,兼具桥墩桩基沉桩功能,适应架桥机进行桩基、盖梁和箱梁的自身水平运输,在架桥机过孔到达桩位后进行桩基的施打贯入,完成在桩基上进行盖梁架设后进行桥面的混凝土箱梁的铺设就位,达到一体化施工要求。
发明内容
本专利发明通过在现有架桥机前端增加打桩机,与架桥机组合为一整体,取代通过架设施工便道或栈桥进行施工的传统工艺,完成预制桩水平运输、喂桩、打设、接桩和截桩作业,改变现有盖梁需现场浇筑的情况,实现打桩和架梁的联合作业,极大保护了周围地理和事态环境。
为达到以上目的,本发明所采用的解决方案是:
一种打桩及架梁一体机,包括前天车、后天车、含横梁和主梁的机架、第一支腿、第二支腿、第三支腿、第四支腿、打桩机、施工平台和操纵系统;其中:
前天车包括起升系统、天车纵移机构、天车横移机构、天车横梁、前车吊具和天车调整横梁;
后天车包括起升系统、天车纵移机构、天车横移机构、天车横梁、后车吊具;
第四支腿包括二对反挂行走装置、二个托架、下部横梁、高度调整伸缩装置和支撑装置;
第三支腿包括二对反挂行走装置、二个托架梁、横移台车、链条驱动横移装置、主梁纵移装置、第三横移梁、二个支撑丝杠和二个锚固装置;
第二支腿包括二对反挂行走装置、二个托架梁、横移台车、链条驱动横移装置、主梁纵移装置、第二横移梁、二个第二立柱、二个支撑丝杠和二个锚固装置;
第一支腿包括二个第一支腿单元,每个第一支腿单元包括一对反挂行走装置、第一立柱、伸缩套装置、支撑丝杠和墩旁托架;
其特征在于:
所述机架是由前后平行设置的二个横梁、左右平行设置的二个主梁组装而成的框架构体;所述主梁由多节三角桁架构体对接而成;所述横梁为矩形桁架结构体;
所述前天车、后天车沿机架的纵向方向设置,它们均通过天车横梁分别置于机架的二个主梁的上部弦杆;所述前天车、后天车的天车横移机构均安装于天车横梁上方;所述天车纵移机构分别安装于天车横梁的两端;所述前天车、后天车的起升系统均固装于天车横梁上,其下端分别安装前车吊具和后车吊具;所述前天车的前车吊具为回转式吊具,其下方连接天车调整横梁;
所述第四支腿设置于机架的主梁后部与外部混凝土梁之间;所述第四支腿的二对反挂行走装置分别置于二个主梁底部的二个弦杆上;所述二个托架分别固装于二对反挂行走装置的下方,其下端分别通过高度调整伸缩装置与下部横梁固装;所述下部横梁的底部固装支撑装置;在所述第四支腿脱离外部混凝土梁时,通过所述操纵系统操纵所述反挂行走装置可使其在机架的主梁下方纵向方向,以满足主梁在外部混凝土梁上的不同位置得到第四支腿的支撑;
所述第三支腿设置于机架的主梁后部与外部混凝土梁之间、且位于第四支腿的前方;所述第三支腿组通过二对反挂行走装置分别置于二个主梁底部的二个弦杆上;所述二个托架梁固装于二对反挂行走装置的下方,其下端分别固装于横移台车的上端面二侧;所述链条驱动横移装置固装于横移台车上,通过所述操纵系统操纵该链条驱动横移装置以使机架在第三横移梁上作横向移动;所述主梁纵移装置固装于托架梁的中部一侧,该主梁纵移装置在操纵系统的操纵控制下借助第三支腿的二对反挂行走装置的支承作用顶推机架的主梁使其纵向行走;所述第三横移梁的底部固装二个支撑丝杠后支承于外部混凝土梁上;在所述第三支腿脱离外部混凝土梁时,通过所述操纵系统操纵反挂行走装置使其在机架的主梁下方纵向行走,以满足主梁在外部混凝土梁上的不同位置得到第三支腿的支撑;
所述第二支腿设置于机架的主梁中部与外部盖梁之间、且位于第三支腿的前方;所述第二支腿通过二对反挂行走装置分别置于二个主梁底部的二个弦杆上;所述二个托架梁固装于二对反挂行走装置的下方,其下端分别固装于横移台车的上端面二侧;所述链条驱动横移装置固装于横移台车上,通过所述操纵系统操纵该链条驱动横移装置以以使机架在第二横移梁上作横向移动;所述主梁纵移装置固装于托架梁的中部一侧,该主梁纵移装置在操纵系统的操纵控制下借助第二支腿的二对反挂行走装置的支承作用顶推机架的主梁使其纵向行走;所述第二横移梁的底部固装二个第二立柱和二个支撑丝杠后支承于外部盖梁上;所述锚固装置将支撑丝杠底部分别锚固于外部盖梁上;在所述第二支腿脱离外部混凝土梁时,通过所述操纵系统操纵反挂行走装置使其在机架的主梁下方纵向行走,以满足机架的主梁在外部混凝土梁上的不同位置得到第二支腿的支撑;
所述第一支腿设置于机架的主梁前部、且位于第二支腿的前方;所述每个第一支腿单元均通过一对反挂行走装置置于二个主梁底部的二个弦杆上;所述反挂行走装置的下端固装第一立柱、伸缩套装置和支撑丝杠;所述操纵系统分别操纵每对反挂行走装置使每个第一支腿单元沿主梁纵向行走至外部盖梁侧面时,通过所述墩旁托架将每个第一支腿单元固定在外部盖梁处;
所述打桩机设置于机架的二个主梁的前部之间的空腔内;当所述前天车和后天车吊运外部管桩沿机架的二个主梁向前运送时,所述打桩架向后放倒、呈水平状态地位于二个主梁之间;当所述打桩机及其外部管桩完成向前翻转至垂直位置时进入待工作状态,通过所述操纵系统启动打桩机,将外部管桩打设贯入地层之中;
所述施工平台吊挂于机架的二个主梁之间的轨道内、且位于打桩机的后方,通过所述操纵系统使施工平台在机架的下方进行纵向移动和垂直升降,满足打桩、截桩和接桩等人工辅助作业;
所述操纵系统通过操纵天车纵移机构控制前天车、后天车沿着机架的二个主梁作纵向移动,通过操纵天车横移机构控制前天车、后天车分别沿着天车横梁做横向移动,通过操纵起升系统分别控制前天车的前车吊具、后天车的后车吊具上下运行,完成外部管桩、盖梁和混凝土梁的运送就位。
本发明可以是,所述第四支腿的支撑装置采用四套螺杆机构,通过单独调整满足第四支腿在有纵向和横向坡度的外部混凝土梁上得到支撑。
本发明还可以是,所述第四支腿的高度调整伸缩装置通过油缸顶升与二个托架一起支撑在机架的主梁底部,从而使机架在第三支腿脱离外部混凝土梁时实现纵向行走、过孔后到达桩位。
本发明还可以是,所述第一支腿的支撑丝杠有二个,采用独立调节方式可以相互错位站立在外部盖梁上,实现机架在呈曲线状态的外部混凝土梁上纵向行走、过孔后到达桩位。
附图说明
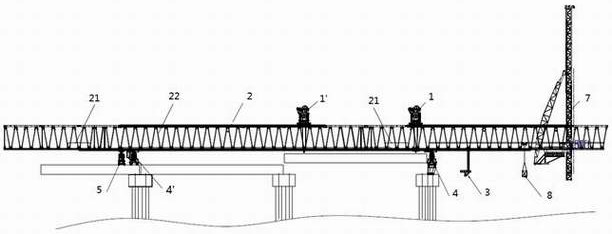
图1是本发明打桩及架梁一体机的结构示意图;
图2是本发明打桩及架梁一体机中前天车的结构示意图;
图3是图2的左视图;
图4 是本发明打桩及架梁一体机中后天车的结构示意图;
图5是图4的左视图;
图6是本发明打桩及架梁一体机中第一支腿的结构示意图;
图7是6的左视图;
图8是本发明打桩及架梁一体机中第二支腿的结构示意图;
图9是图8的左视图;
图10是本发明打桩及架梁一体机中第三支腿的结构示意图;
图11是10的左视图;
图12是本发明打桩及架梁一体机中第四支腿的结构示意图;
图13是图12的左视图;
图14是本发明打桩及架梁一体机中打桩机向前翻转至垂直状态的示意图;
图15是图14的右视图;
图16是图14的仰视图;
图17是本发明打桩及架梁一体机中打桩机向后放倒至水平状态的示意图;
图18是图17的俯视图。
具体实施方式
如图1-18所示,一种打桩及架梁一体机,包括前天车1、后天车1’、含横梁21和主梁22的机架2、第一支腿3、第二支腿4、第三支腿4’、第四支腿5、打桩机7、施工吊篮8和操纵系统;前天车1包括起升系统11、天车纵移机构12、天车横移机构13、天车横梁14、前车吊具15和天车调整横梁16;后天车1’包括起升系统11、天车纵移机构12、天车横移机构13、天车横梁14、后车吊具15’;第四支腿5包括二对反挂行走装置31、二个托架52、下部横梁56、高度调整伸缩装置58和支撑装置59;第三支腿4’包括二对反挂行走装置31、二个托架梁42、横移台车43、链条驱动横移装置44、主梁纵移装置45、第三横移梁46’、二个支撑丝杠38和二个锚固装置49;第二支腿4包括二对反挂行走装置31、二个托架梁42、横移台车43、链条驱动横移装置44、主梁纵移装置45、第二横移梁46、二个第二立柱47、二个支撑丝杠38和二个锚固装置49;第一支腿3包括二个第一支腿单元30,每个第一支腿单元30包括一对反挂行走装置31、第一立柱37、伸缩套装置39、支撑丝杠38和墩旁托架32;其中:
所述机架2是由前后平行设置的二个横梁21、左右平行设置的二个主梁22组装而成的框架构体;所述主梁22由多节三角桁架构体对接而成;所述横梁21为矩形桁架结构体。
所述前天车1、后天车1’沿机架2的纵向方向设置,它们均通过天车横梁14分别置于机架2的二个主梁22的上部弦杆;所述前天车1、后天车1’的天车横移机构13均安装于天车横梁14上方;所述天车纵移机构12分别安装于天车横梁14的两端;所述前天车1、后天车1’的起升系统11均固装于天车横梁14上,其下端分别安装前车吊具15和后车吊具15’;所述前天车1的前车吊具15为回转式吊具,能够与后天车1’配合抬吊外部混凝土梁和管桩,同时能够单独进行外部盖梁的吊装和旋转对位;所述前车吊具15其下方连接天车调整横梁16,适应不同坡度的外部盖梁,实现外部盖梁与管桩的精准对位。
所述第四支腿5设置于机架2的主梁22后部与外部混凝土梁之间;所述第四支腿5的二对反挂行走装置31分别置于二个主梁22底部的二个弦杆上;所述二个托架52分别固装于二对反挂行走装置31的下方,其下端分别通过高度调整伸缩装置58与下部横梁56固装;所述下部横梁56的底部固装支撑装置59;在所述第四支腿5脱离外部混凝土梁时,通过操纵系统操纵反挂行走装置31使其在机架2的主梁22下方纵向行走,以满足主梁22在外部混凝土梁上的不同位置得到第四支腿5的支撑。所述第四支腿5的支撑装置59采用四套螺杆机构,通过单独调整满足第四支腿5在有纵向和横向坡度的外部混凝土梁上的得到支撑。所述第四支腿5的高度调整伸缩装置58通过油缸顶升与二个托架52一起支撑在机架2的主梁22底部,从而使机架2在所述第三支腿4’脱离外部混凝土梁表面时实现纵向移动过孔。
所述第三支腿4’设置于机架2的主梁22后部与外部混凝土梁之间、且位于第四支腿5的前方;所述第三支腿4’通过二对反挂行走装置31分别置于二个主梁22底部的二个弦杆上;所述二个托架梁42固装于二对反挂行走装置31的下方,其下端分别固装于横移台车43的上端面二侧;所述链条驱动横移装置44固装于横移台车43上,通过所述操纵系统操纵该链条驱动横移装置以使机架2在第三横移梁46’上作横向移动;所述主梁纵移装置45固装于托架梁42的中部一侧,该主梁纵移装置在操纵系统的操纵控制下借助第三支腿4’的二对反挂行走装置31的支承作用顶推机架2的主梁22使其纵向行走;所述第三横移梁46’的底部固装二个支撑丝杠38后支承于外部混凝土梁上;所述锚固装置49将支撑丝杠38底部分别锚固于外部混凝土梁上;在所述第三支腿4’脱离外部混凝土梁时,通过所述操纵系统操纵反挂行走装置31可使其在机架2的主梁22下方纵向行走,以满足机架2的主梁22在外部混凝土梁上的不同位置得到第三支腿4’的支撑。
所述第二支腿4设置于机架2的主梁22中部与外部盖梁之间、且位于第三支腿4’的前方;所述第二支腿4通过二对反挂行走装置31分别置于二个主梁22底部的二个弦杆上;所述二个托架梁42固装于二对反挂行走装置31的下方,其下端分别固装于横移台车43的上端面二侧;所述链条驱动横移装置44固装于横移台车43上,通过所述操纵系统操纵该链条驱动横移装置以使机架2在第二横移梁46上作横向移动;所述主梁纵移装置45固装于托架梁42的中部一侧,该主梁纵移装置在操纵系统的操纵控制下借助第二支腿4的二对反挂行走装置31的支承作用顶推机架2的主梁22使其纵向行走;所述第二横移梁46的底部固装二个第二立柱47和二个支撑丝杠38后支承于外部盖梁上;所述锚固装置49将支撑丝杠38底部分别锚固于外部盖梁上;在所述第二支腿4脱离外部混凝土梁时,通过所述操纵系统操纵所述反挂行走装置31可使其在机架2的主梁22下方纵向行走,以满足机架2的主梁22在外部混凝土梁上的不同位置得到第二支腿4的支撑。
所述第一支腿3设置于机架2的主梁22前部、且位于第二支腿4的前方;所述每个第一支腿单元30均通过一对反挂行走装置31置于二个主梁22底部的二个弦杆上;所述反挂行走装置31的下端固装第一立柱37、伸缩套装置39和支撑丝杠38;所述操纵系统分别操纵每对反挂行走装置31使每个第一支腿单元30沿主梁2纵向方向行走至外部盖梁侧面时,通过所述墩旁托架32将每个第一支腿单元30固定在外部盖梁处。所述第一支腿3的支撑丝杠38有二个,采用独立调节方式以相互错位的方式支撑于外部盖梁上,实现机架2在呈曲线状态的外部混凝土梁上纵向行走、过孔后到达桩位。
所述打桩机7设置于机架2的二个主梁22前部之间的空腔内;当所述前天车1和后天车1’吊运外部管桩沿机架2的二个主梁22向前运送时,所述打桩架72向后放倒、呈水平状态地位于二个主梁22之间;当所述打桩机7及其外部管桩完成向前翻转至垂直位置时进入待工作状态,通过所述操纵系统启动打桩机7,将外部管桩打设贯入地层之中。
所述施工平台8吊挂于机架2的二个主梁22之间的轨道内、且位于打桩机的后方,通过所述操纵系统使施工平台8在机架2的下方进行纵向移动和垂直升降,满足打桩、截桩和接桩等人工辅助作业。
所述操纵系统通过操纵天车纵移机构12控制前天车1、后天车1’沿着机架2的二个主梁22作纵向移动,通过操纵天车横移机构13控制前天车1、后天车1’分别沿着天车横梁14做横向移动,通过操纵起升系统11分别控制前天车1的前车吊具15、后天车1’的后车吊具15’上下运行,完成外部管桩、盖梁和混凝土梁的运送就位。
本发明打桩及架梁一体化机,不需铺设临时便道或栈桥,以及其它大型船机辅助,利用架桥机自身完成桩、梁的水平运输与架设施工的全部作业,进一步拓展架桥机的施工应用范围。具备打桩和架梁以及湿接缝施工功能,实现一机多能。桥梁施工中所使用的管桩、盖梁、箱梁全部工厂预制完成,预制过程不受恶劣环境影响,实现部件模块化。施工过程对周围环境友好,适合自然保护区、沼泽、滩涂、长周期波临海施工、山涧以及城市建成区施工作业,不破坏周边植被和环境,极大保护了周围地理和生态环境。
- 一种打桩及架梁一体机
- 一种架桥打桩引孔一体机及其打桩方法