基于射光频回波信息的融合处理方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于信息处理技术领域,具体为一种基于射光频回波信息的融合处理方法。
背景技术
雷达是一种常用的探测传感器,在舰船上广泛使用。但雷达本身不具有判别目标属性的能力,在海洋环境中应用时,易受到海杂波的影响,雷达分辨不出是目标还是海杂波,容易将目标淹没在杂波中,严重时会造成撞船事故。
光电传感器是一种常用的监视设备,分辨率高,可构建海洋环境图像,光电设备基于图像的目标识别技术已得到极大发展,可更直观的检测舰船航行周边环境信息,包括海浪、碍航物等。但光电设备作为一种被动传感器,不具备测定目标距离、航速等信息的能力,一直没有作为船用导航设备使用。
如果将光电图像识别技术和雷达回波检测技术结合起来,利用光电图像识别技术将雷达回波中的目标识别出来,再对目标进行二次检测,对于提升雷达性能有着重要意义。
发明内容
本发明的目的在于提出了一种基于射光频回波信息的融合处理方法,利用光电设备的图像识别能力,辅助雷达完成对海杂波和目标的分类,降低雷达虚警率,提高雷达对目标的检测质量。
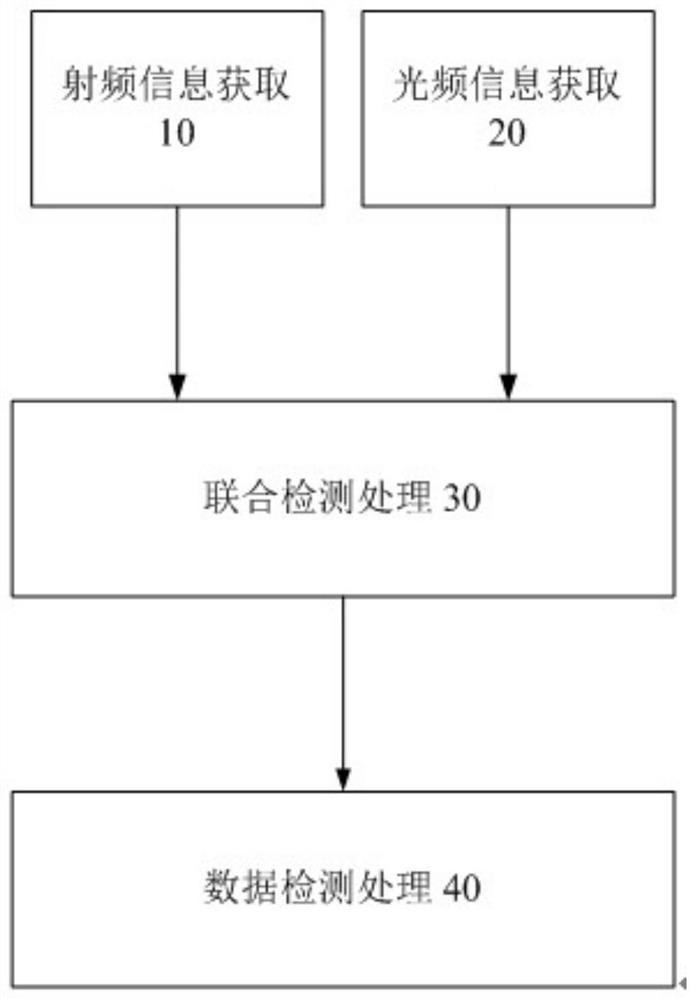
实现本发明目的的技术解决方案为:一种基于射光频回波信息的融合处理方法,包括如下步骤:
10)射频信息获取:获取雷达对舰船周边的海洋环境探测射频信息,按照距离-方位角度单元进行编码排序;
20)光频信息获取:获取可见光全景摄像头对舰船周边的海洋环境探测光频信息,按照方位角度单元进行编码排序;
30)联合检测处理:对射频和光频信息进行异源数据匹配、海杂波过滤处理,并将每个单元分为海杂波和目标两类;
40)数据检测处理:对分类后的目标信息进行点迹和航迹处理,分别提取目标距离信息、目标角度信息。
优选地,联合检测处理的具体过程为:
利用图像深度特征将光频信息的方位角度单元信息映射到距离-方位角度单元,与射频回波坐标信息一致;
将射频幅度信息和光频灰度信息归一化处理,进行数据对齐;
利用步骤20)光电图像识别结果对每一单元的雷达回波特征进行比对,标注出海杂波和目标类型;
对雷达每一个单元标注好的回波进行分类,分为海杂波和目标两类。
本发明与现有技术相比,其显著优点为:本发明在保持原有雷达检测方法之上,增加了射光频融合处理,通过光频的高分辨图像识别能力,对射频信息进行目标分类,只对目标回波点迹进行检测,减少海杂波对后续检测的影响,提高了雷达在海杂波背景下对目标的检测性能。
下面结合附图对本发明做进一步详细的描述。
附图说明
图1为本发明基于射光频回波信息的融合处理方法的流程图。
图2为图1中联合检测处理的流程图。
图3为像素坐标系示意图。
图4为图像坐标系和相机坐标系的对应关系示意图。
具体实施方式
如图1所示,一种基于射光频回波信息的融合处理方法,包括如下步骤:
10)射频信息获取:获取雷达(射频)对舰船周边的海洋环境探测射频信息,按照距离-方位角度单元进行编码排序;
20)光频信息获取:获取可见光全景摄像头(光频)对舰船周边的海洋环境探测光频信息,按照方位角度单元进行编码排序;
30)联合检测处理:对射频和光频信息进行异源数据匹配、海杂波过滤等处理;
所述联合检测处理(30)步骤具体为:
31)坐标转换:利用图像深度特征将光频信息的方位角度单元信息映射到距离-方位角度单元,与射频回波坐标信息一致;
雷达图与光电图映射本质上是相机坐标系与像素坐标系的转换,需要先将相机坐标系转换为图像坐标系,再将图像坐标系转换为像素坐标系。
像素坐标系指以图像左上角为原点,u轴向右,v轴向下,图像坐标系指以图像中心为原点,x轴向右,y轴向下,如图3所示:
像素坐标系和图像坐标系的转换关系为:
(u,v)为光电图像的像素坐标,(u
用齐次坐标表示为:
图像坐标系和相机坐标系的对应关系用图4表示,其中,f为相机焦距,根据图4可以得出以下转换关系:
(Xc,Yc,Zc)为相机坐标系中的三个方向坐标;
同样可用矩阵表示:
结合公式(3)和公式(4),像素坐标系和相机坐标系的转换关系如下:
其中,
公式(6)是本发明坐标转换的主要参考公式,像素坐标中的(u,v)正是光电图像中对应的像素坐标,即传给下一步物体检测的输入,因此特征匹配只需要获得物体在相机坐标系中的坐标即可。
本步骤通过异源数据匹配将雷达数据和光学数据的融合。雷达数据反应的是目标在俯视平面上的位置信息,光学数据反映的是目标在空间中的图像信息,异源数据匹配是结合雷达数据提供的目标位置信息和其他传入的位置参数,获得目标在真实世界的实际位置,根据世界坐标系和像素坐标系的转换,将雷达反映的目标和光学数据中反映具体物体对应起来,使二者产生一定的映射关系。本步骤一方面是将目标与位置信息绑定,可以使用目标的识别结果反过来对雷达数据进行标识,另一方面确定疑似目标的对应位置,在进行似物性估计模型的处理时可针对疑似目标位置进行检测,而不至于进行全图搜索,优化了计算复杂度。
32)数据对齐:将射频幅度信息和光频灰度信息归一化处理,进行数据对齐;
33)特征匹配:利用步骤20)光电图像识别结果对每一单元的雷达回波特征进行比对,标注出海杂波和目标类型;
特征匹配实际上就是通过海杂波过滤标注出海杂波和目标类型,在获得雷达数据中的疑似目标位置后,根据异源数据融合结果,获取其在光学数据对应的位置,对这些位置周围的光学数据进行采样,并对采样生成的区域进行似物性估计,判断该区域内是否存在物体,保留可能包含关键目标的候选区域,过滤不包含目标的其它区域。经过过滤后的有效数据为当前处于有效范围内的疑似目标数据,可以减少关键目标识别所需处理的数据量。
34)二分类:对雷达每一个单元标注好的回波进行分类,分为海杂波和目标两类。
40)数据检测处理:对分类后的目标信息进行点迹和航迹处理,分别提取目标距离信息、目标角度信息。
自此,就实现了基于射光频回波信息的融合处理方法,满足雷达在海杂波背景下稳定建航的需求。
本发明在保持原有雷达信息处理基础之上,增加了射光频融合处理,对雷达原有信息处理后的数据再次“滤波”,通过光电图像的识别能力,对雷达信息数据进行识别,“剔出”杂波数据,保留目标数据,雷达再对射光频融合处理后的数据进行二次处理,提取目标距离、方位等信息,有效提高雷达建航的稳定性,降低虚警。
- 基于射光频回波信息的融合处理方法
- 一种基于多频点回波信息融合的目标跟踪方法