改进的用于粘性泵送的电动马达
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及电动马达技术,并且特别涉及一种改进类型的电动马达,该电动马达特别适合于其中马达可能需要提供可变高扭矩以在对应可变负载下维持转速的应用,诸如粘性泵送,例如,包括污水泵送。
背景技术
日益加剧的城市化进程导致现有下水道主管系统上方或易于接近下水道主管系统的可用土地短缺。该短缺促使人们开发了将污水从始发点转移到下水道主管进行处理的各种方法。最受欢迎的方法是安装本地加压给水,以将污水“上坡”泵送并在压力下将其注入现有的下水道主管中。由于该技术具有许多优点,因此在第一世界城市应用中越来越受欢迎。首先,在经济上,压力管更小,并且安装更便宜;其次,通过泵送操作对污水进行了一些预处理;再次,它为智能泵送技术对沿整个系统的污水流动进行计时开辟了道路。然而,对于许多装置而言,这需要能够脱离电网操作的电动马达,该电动马达仅由替代能量发电机和/或电池系统供电。
该应用通常需要潜水泵将污水从当地的建筑水箱或贮水池泵入主污水管线。泵马达需要进行远程控制,以确保本地水箱不会溢出。该泵还包括切割和碾磨附件,该附件在将原始污水加压泵入下水道主管之前对其进行咀嚼。因此,电动马达需要能够驱动具有困难负载的泵,因为该泵正在切碎和磨碎各种有机废物和无机污染物。
在这种情况下,发明人已经确定泵马达需要满足几个要求。首先,马达需要大量功率(约1kW)才能在经济和技术上可行的水平上操作。然而,在该功率水平下,传统电动马达通常会被绕制用于更高的电压,传统上大于100V ac/dc。
另外,启动扭矩相当大,因为马达需要能够泵入全压供应管线,操作碾磨床并应对困难的非线性泵扭矩曲线。特别地,发明人已经确定所需扭矩通常在单转内变化,并且马达需要能够传递该可变扭矩。如上所述,该应用中使用的泵类型为马达提供了挑战性的非恒定负载,而切割附件则提供了另一个要应对的随机可变负载。当前的替代能源技术将通过替代能源技术输送的马达可用电压置于24到48VDC范围内,这对于现成的电动马达而言太低了。
本领域的其他人正在研究通过将市电电压(即110或240VAC)逆变器连接到电池组(由离网电源(诸如太阳能或风力驱动发电机)充电),来操作AC电动马达并将其连接到商用压力下水道泵。然而,发明人已经发现这些布置在许多方面都不是最优的。特别地,当前技术的市电逆变器具有显著的静态电流要求,这给电池系统带来了恒定的消耗。市电逆变器也不适合驱动特殊的泵负载,从而进一步降低了效率。此外,AC马达不能提供足够的启动扭矩来可靠地操作泵。这些困难当加上用有限的可用能量来给电池充电时,意味着这些系统难以成功操作或需要不经济的能量输入。鉴于以上所述,发明人已经认识到了对能够驱动可变负载的低压和高扭矩电动马达的总体需求。
因此,期望提供一种减轻现有技术的一个或更多个困难的电动马达,或者至少提供一种有用的替代方案。
发明内容
根据本发明的一些实施例,提供了一种用于粘性泵送的电动马达,
其中,电动马达是配置为由约40-60VDC的低DC电压驱动的无刷DC马达,并且包括:
具有永磁体的转子;
定子,该定子具有叠片堆和在其周围缠绕的绕组;以及
控制器,该控制器提供流经绕组的电流的电子换向(electronic commutation);
其中,绕组和叠片堆被配置为处理来自控制器的至少1kW的连续电力,并且控制器包括反馈电路,该反馈电路包括耦合到转子并且具有一转的至少1/500的角分辨率的旋转传感器,以允许控制器将由电动马达生成的扭矩控制到对应的程度。
在一些实施例中,电动马达包括:用于生成电流的PWM(脉冲宽度调制)部件;以及滤波器部件,该滤波器部件被配置为对由PWM部件生成的噪声进行滤波。
在一些实施例中,滤波器部件包括模拟滤波器,以对由PWM部件生成的来自反馈电路的噪声进行滤波。
在一些实施例中,滤波器部件包括数字滤波器,以对由PWM部件生成的噪声进行滤波。
在一些实施例中,电动马达包括霍尔传感器(Hall sensor),以生成转子位置信号,以供控制器用于针对所述电子换向确定转子的旋转位置,其中,控制器被配置为根据转子的转速选择性地仅使用霍尔传感器或旋转传感器来控制流经绕组的电流。
在一些实施例中,叠片配置有大的回程,以避免或减小叠片的磁饱和。
在一些实施例中,叠片堆具有沿转子的纵轴的厚度,使得电动马达可以输出至少6-8Nm的扭矩。
在一些实施例中,叠片堆倾斜以平滑马达的扭矩波动。
在一些实施例中,叠片中的每一个叠片包括径向地朝向转子的永磁体引导的齿,齿和永磁体的面对的表面被配置为使得对应的磁场分布基本上最小化被移交给绕组的平均电流和脉冲电流。
在一些实施例中,叠片中的每一个叠片包括径向地朝向转子的永磁体引导的齿,齿和永磁体的面对的表面被配置为减小磁和静态损耗。
在一些实施例中,电动马达包括温度传感器,以生成指示转子的永磁体的温度的信号,该信号耦合至控制器的输入,控制器进一步被配置为控制流经绕组的电流,以避免对永磁体的热损坏。
在一些实施例中,电动马达包括温度传感器,以生成指示转子的永磁体的温度的信号,该信号耦合至控制器的输入,控制器进一步被配置为控制流经绕组的电流,以避免对永磁体的热损坏。
在一些实施例中,绕组和叠片堆被配置为处理来自控制器的至少1-2kW的连续电力。
在一些实施例中,绕组和叠片堆被配置为在启动期间处理来自控制器的至少3kW的峰值电力。
在一些实施例中,电动马达包括DC电源部件,该DC电源部件从AC市电电力中生成用于电动马达的DC电力,使得电动马达可以由AC市电电力供电。
根据本发明的一些实施例,提供了一种生产用于粘性泵送的电动马达的方法,该方法包括以下步骤:
向转子提供永磁体;
将转子耦合到旋转传感器,该旋转传感器具有一转的至少1/500的角分辨率;
形成具有叠片堆的定子并在其周围缠绕线绕组,使得绕组和叠片堆被配置为处理至少1kW的连续电力;以及
形成控制器以提供流经绕组的电流的电子换向,其中,控制器包括耦合到旋转传感器的反馈电路,以允许控制器将由电动马达生成的扭矩控制到对应的程度;
其中,电动马达是无刷DC马达,无刷DC马达被配置为由约40-60VDC的低DC电压驱动。
在一些实施例中,该方法包括
获得被配置为由约40-60VDC的低DC电压驱动的无刷DC马达,该无刷DC马达包括:
具有永磁体的转子;
定子,该定子具有第二叠片堆和在其周围缠绕的第二绕组;以及
控制器,该控制器提供流经绕组的电流的电子换向;
其中,形成定子的步骤包括:去除第二叠片堆和在其周围缠绕的第二绕组,并用叠片和上述绕组代替它们;
将旋转传感器连接到控制器的反馈电路。
在一些实施例中,控制器包括:用于生成电流的PWM(脉冲宽度调制)部件;以及滤波器部件,该滤波器部件被配置为对由PWM部件生成的噪声进行滤波;并且该方法包括以下步骤:调整滤波器部件以最小化控制器的反馈电路中的噪声。
附图说明
以下仅通过举例的方式,参考附图描述本发明的一些实施例,在附图中:
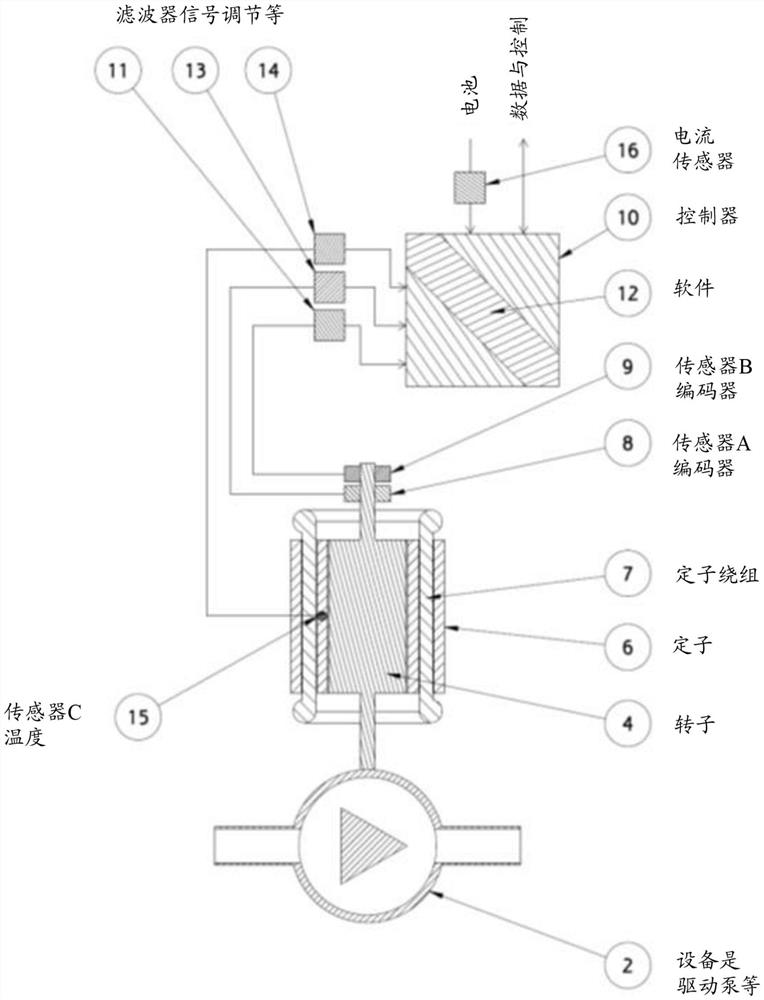
图1是根据本发明的一个实施例的用于驱动泵的电动马达的示意图;
图2和图3是图1的电动马达的分解图和组装图;
图4包括电动马达的转子组件的横截面侧视图;
图5是现有技术的转子和定子叠片的平面图;
图6是根据本发明的一些实施例的转子和定子叠片的平面图;
图7示出了图5的现有技术的定子叠片的截面中的模拟磁场(为清楚起见,已经放大了转子定子间隙);
图8示出了在图6的定子叠片的截面中的模拟磁场(为清楚起见,已经放大了转子定子间隙);
图9是原始磁极间隙中的磁场强度的曲线图,该磁场强度是沿着沿间隙中心从磁极的一个边缘延伸到该磁极的另一边缘的弧的距离的函数;
图10是在修改的磁极间隙中的磁场强度的曲线图,该磁场强度是沿着沿间隙中心从修改磁极的一个边缘延伸到该磁极的另一边缘的弧的距离的函数;
图11是根据本发明的一些实施例的定子叠片堆的照片;
图12是示出附接到马达的转子轴的两个编码器的照片;以及
图13和图14是电路图,示出了模拟滤波器网络,对于互连电缆的长度约为15m(图13)和300mm(图14)的实施例,该模拟滤波器网络用于对来自将两个编码器连接到马达控制器的两条互连电缆的开关噪声进行滤波。
具体实施方式
本发明的实施例包括高扭矩和低压电动马达,该电动马达适合于驱动不可预测的可变负载,诸如当该马达用于泵送诸如例如原始污水的粘性流体时所经受的负载。通常,马达被配置为由约40至60VDC范围内,并且最通常为约50VDC(诸如48VDC的工业标准电压)的低压驱动。
尽管本发明的实施例是在原始污水泵的背景下进行描述的,但是对于本领域技术人员而言明显的是,该马达可以应用于需要低压电动马达来提供高扭矩的任何应用中。电动马达的其它泵送应用包括井筒抽水和其它形式的灌溉、采矿等。根据本公开,马达的许多其它应用对本领域技术人员将是明显的。
如图1中所示,电动马达是无刷DC马达,其包括大体上圆柱形的转子4,在该转子4上安装有永磁体。转子4设置在具有定子绕组7的同心且大致为圆柱形的定子6内。定子绕组7由控制器10供电,该控制器10从可再生能源(诸如电池存储装置)接收低压DC电力,该可再生能源通过可再生能量发电机(诸如例如光伏太阳能电池和/或风力发电机)(未示出)再充电。流到控制器10的电流(在本实施例中来自电池)由电流传感器16监视。控制器10以变化的驱动信号向定子绕组7供电,该变化的驱动信号使定子生成与转子4的永磁体相互作用的对应变化的磁场,从而使转子4绕其纵轴旋转,并且从而机械地驱动耦合到转子的驱动轴一端的负载2,在所描述的实施例的上下文中,该负载2是如上所述的污水泵2。在所描述的实施例中,控制器10位于距潜水马达和泵较远的位置(在所描述的实施例中为约15m的距离)。然而,在替代实施例中,控制器10和泵2位于同一位置并且都被浸没在水中,使得仅电池电力线和监视电缆从污水罐延伸。例如,在一些实施例中,控制器10和泵2在共同的壳体内,并且在一些实施例中,控制器10位于马达的铸造体内。
在一个实施例中,如图1中所示,两个编码器8、9耦合到驱动轴的另一端,以感测转子的旋转位置和速度,并且从而向控制器提供反馈,从而允许控制器调节驱动器信号,并且从而响应于由泵提供给转子的可变机械负载来控制转子的转速。
定子叠片和叠片堆
在一个实施例中,通过修改在CNC机器中使用的可商购获得的无刷DC马达来生产马达。在其它实施例中,马达是通过scratch制造的。
在导致本发明的工作中,最初的挑战是确定使用该类型的马达技术是否有可能在低压(约48VDC)下提供足够的功率来驱动泵。1kW是该类型技术的高功率,并且在这方面,以前的努力已经在高的多的电压(>100V)下操作,以便减小电流,并且从而减小定子绕组和相关联布线中的电阻损耗。由于根据本发明的马达要在低DC电压下操作,因此产生的电流要比在现有技术中以高的多的电压操作的马达大得多。
发明人确定,适当框架尺寸(NEMA 56-66)的现成叠片没有足够的容量在约25-35A的所需电流下有效操作。因此,对叠片结构进行了修改,以增加“回铁路径(back ironpath)”(作为连接叠片的齿/磁极以提供磁通路径的外部环形区域),并鉴于48VDC操作的较高电流,降低了其中的磁通密度。
另外,修改了定子叠片的齿分布,以减小前边缘磁极开关电流,并且从而减轻了控制器上的负载。由于更紧密配合转子和定子(约0.5mm,而不是传统马达中大于1mm的间隙)而导致的更严格的公差要求为组装开发改进的技术和夹具。这有利于将转子插入定子而不会损坏转子磁体。
以下步骤用于组装马达:
(i)将马达定子组装到壳体中;
(ii)将马达转子组装到轴上;
(iii)将两者都插入组装夹具;
(iv)操作组装夹具(组装夹具确保将转子正确且安全地插入定子);
(v)将轴承固定并紧固到位;
(vi)检查转子现在可以在定子中自由旋转;
(vii)安装编码器传感器A;
(viii)安装编码器传感器B;以及
(ix)将转子耦合到从动马达(这允许转子以受控的方式缓慢旋转);
(x)将编码器传感器A和B附接到测试输入;
(xi)将马达相绕组附接到测试输入;
(xii)接合从动驱动器(这使转子旋转);
(xiii)手动对准编码器传感器A和B,直到测试仪器发出正确对准的信号(灯);
(xiv)将编码器传感器固定到位;
(xv)停止从动驱动器;
(xvi)将测试设备切换到性能模式(马达现在已经像正常操作时那样通电);
(xvii)运行自动测试序列以量化马达性能等。
除了修改叠片之外,用于定子绕组的线也被较大直径的线代替,以减少电阻损耗和随之而来的发热。应当理解,在定子绕组中使用大直径电线与使定子叠片尽可能大以减小其中的磁通密度来避免饱和之间存在折衷。出于同样的原因,对于叠片使用高级磁性钢也很重要。
在转子磁体是稀土磁体的实施例中要考虑的另一个问题是马达绕组中的电流密度,这可能导致叠片的局部加热,并且最终导致马达稀土磁体失效。
在导致本发明的工作中,对叠片和绕组的这些修改表明,采用该马达技术,可以在48V操作电压下以可接受的电阻损耗和发热达到所需的功率水平。然而,马达控制和扭矩输出仍然存在困难。特别地,具有如上所述的定子叠片的两种变型的马达,尽管可操作且足够强大,但不能平滑地驱动由污水泵提供的特殊负载。
为了解决这些缺点,通过以下方式对叠片堆进行了修改:(i)通过增加更多的叠片将堆的长度/深度(即,沿着转子的纵轴)从60cm增加到90cm(并且从而用相应更长的版本替换转子磁体),以及(ii)通过倾斜堆以平滑马达磁场的扭矩波动。尽管倾斜的叠片堆(skewed lamination stacks)已在专用高速AC马达中使用,但据发明人所知,它们以前从未在该类型的DC应用中使用过。
通过对叠片和叠片堆的修改,马达更加有效,并且被证明是污水泵的(显然)最优驱动器。实际上,低速扭矩是如此之高,以至于液压性能得到了显著改善,原因是由于增大的低速扭矩,更多的流体以较低的速度被泵送。
控制器
采用如上所述的修改马达,下一个任务是开发一种控制器,以操作修改的马达。发现商用的现成控制器是不合适的,因为在给定的可变泵负载下,它们不能可靠地启动修改的马达,并且由于不规则的泵扭矩而经常会再次喘振(surge)。发明人确定主要问题是速度反馈系统的不稳定性。该类型的传统控制器具有霍尔速度传感器系统,该系统由每转1个或3个霍尔传感器组成,以测量马达速度。发明人确定该标准配置太粗糙以至于不能准确地映射泵的不规则扭矩负载。为了解决该困难,本文所述的马达包括耦合至转子驱动轴的高分辨率转速传感器,如图12中所示,以提供足以允许控制器在可变负载下快速校正泵扭矩不规则性的高角度分辨率。在所描述的实施例中,被设计用作位置传感器的可商购的1024脉冲光学编码器用作旋转传感器,提供驱动轴每完整的一转1024个脉冲的分辨率。
在所描述的实施例中,控制器10是可商购的控制器,诸如Electromen EM347或ROBOTEQ SBI/HBM/MBL,但是具有用于控制器的微处理器的修改的软件。控制器被配置为取决于当前马达速度有选择地仅使用两个速度传感器中的一个。在低转速下,通常以标准方式使用三个霍尔传感器来确定正确的启动方向并触发定子绕组电流的前几次换向。一旦转子达到至少100rpm的转速,控制器回路将仅使用高分辨率编码器,从而为马达提供更大的速度和扭矩控制。这有助于马达在泵提供的波动负载下平滑运行。
除上述部件之外,温度传感器15埋在线圈绕组中以监视转子磁体的温度并保护它们免于过热。在所描述的实施例中,温度传感器是负温度系数(NTC)热敏电阻。然而,在另一个实施例中,温度传感器是K型热电偶。
噪声滤波
该类型的现代马达控制器通常采用脉冲宽度调制(PWM)技术来生成驱动马达所需的波形。发明人确定必须将PWM用于所描述的污水泵送应用,因为它提供了最高的总电效率和最低的热损耗。然而,PWM系统生成电磁噪声,该电磁噪声可影响其它电气部件。在所描述的马达中,所产生的电噪声污染了反馈系统,从而造成马达和泵的控制问题。为了解决该困难,开发了一系列的滤波器来减轻噪声。在这种情况下,发明人确定由于施加了低电压和高电流而使噪声处于如此高的水平,因此有必要通过两种方式来减轻噪声:(i)通过将调整的模拟滤波器11、13应用于反馈传感器信号,以及(ii)在控制器10中包括软件滤波器12。
滤波器11、13以多种方式工作。首先,通过加载线路,这意味着高频低功率噪声脉冲被衰减;其次,通过对特定控制器操作的PWM频率进行选择性滤波。首先计算滤波器值,并且然后根据经验进行调节,同时采用标准测试设备监视信号。通过这种方式,可以对滤波器进行调整,以针对PWM频率和电缆参数提供最小的噪声。这很重要,因为更改电缆类型和/或长度需要进行不同的调整。再次,确保信号正确接地和屏蔽,包括通过监视接地电流和采用大的接地导体降低接地阻抗,来仔细注意正确的接地方案。
图13和图14是电路图,示出了模拟滤波器网络,对于互连电缆的长度是约15m(图13)和300mm(图14)的实施例,该模拟滤波器网络用于对来自将两个编码器连接到马达控制器的两条互连电缆的开关噪声进行滤波。在后一实施例中,用于温度传感器互连的滤波器包括33Hz的低通(共模)滤波器和21Hz的T滤波器,并且用于电流传感器16的滤波器被设置为159Hz。然而,对于本领域技术人员而言明显的是,滤波器频率需要调整至控制器PWM开关频率和互连电缆的特定参数。例如,电阻器R2和R3被针对控制器10的输出阻抗Zout调整,并且电阻器R4到R7以及电容器C7和C8被针对电缆长度和电缆类型调整。
传感器与监视
除上述内容外,马达还包括本领域技术人员已知的标准传感器,用于监视马达性能,包括绕组和控制器的温度、马达相电压和电流、电源电压和电流以及以压力和流速形式的马达负载。
来自传感器的信息会定期发送到远程监视系统。这样可以完整映射系统的实时性能,并可以调整控制器和马达。这些传感器已集成到马达和控制器中,并通过使用超低功率电子设备以及在控制器不操作时将其置于低功率状态(在一些情况下将其全部关闭)来进行优化以实现低功耗。当然,这意味着控制器必须唤醒相关联的传感器控制过程。通过选择低待机功耗部件并确保在可行的情况下将所有处理器和相关联的电子设备置于低功率睡眠状态,对主马达功率控制器进行了类似的优化,以实现最低静态功耗。总结:如果马达不操作并且输入功率条件良好(即电池已充电),则进入睡眠模式;否则,如果马达不操作且输入功率条件不佳,则关闭马达。
在条件允许的情况下,以温度传感器为中心的附加控件允许施加附加的启动电流,从而增大了用于泵送的马达启动扭矩,这被映射到速度控制回路上。由于发明人已确定马达能够承受大于1kW的短期过载(例如,发明人已以2kW的功率启动马达),并且已知当前绕组温度(经由埋藏的温度传感器),因此可以允许控制器将启动电流限制设定为例如50A(而不是25A),持续例如3s等。
例如,如果马达绕组是冷的,则绕组可以在达到可能损坏磁体的温度之前以全功率操作。因此,控制器可以允许全功率,或者如果很冷,则允许过驱动持续例如2s,接下来是一段时间的正常连续全功率。如果马达绕组是热的,则可以修改上述设置以最大化启动扭矩,这可能会损失运行扭矩。
与可比较的现有技术的AC市电供电的或(基于AC逆变器的)污水泵送系统相比,本文所述的具有改进的电动马达的污水泵提供了非常优越的低速启动和液压性能。另外,改进的泵的功率要求比现有技术的泵送系统好约六倍。例如,在一项测试中,两种类型的泵均在相同条件下操作,并由相同的太阳能/电池存储电源供电。在2018年澳大利亚冬季期间,本文所述的改进的泵送系统在极低的日照强度的4天期间内均可轻松操作,而现有技术的AC系统在第二天晚上将电池摧毁并停止操作。
尽管本发明的马达是为了与低压电源一起使用而开发的,但是上述马达的实施例在功耗和电力输送(低速启动、低速泵送)方面比现有技术的马达效率要高得多,实际上它们不仅用于离网应用,还可以在市电AC连接的系统上使用它们。例如,这可以通过将市电运行到简单的开关模式电源中,以将电压降低至约50V以使马达操作来完成。因此,可以通过增加相对便宜的电源来进行改进。另外,所描述的马达比现有技术的马达效率高得多,以至于所描述的马达之一可以从四个房屋抽水,而现有技术的马达只能从一个房屋抽水。
在不脱离本发明的范围的情况下,许多修改对于本领域技术人员将是明显的。
- 改进的用于粘性泵送的电动马达
- 用于改进的泵送能力的增塑胶乳制剂