一种基于惯性信息辅助的水声信道跟踪与预测方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及信号处理技术领域,具体为一种基于惯性信息辅助的水声信道跟踪与预测方法。
背景技术
水声定位技术是在海洋资源开发利用中不可或缺的技术。超短基线定位过程中,接收基阵安装在航行器上,接收海底应答器发射的应答信号,实现定位解算。但现有技术中存在以下缺陷:受制于海洋环境和水下航行器的工况,声波在水中的传播会受到高噪声、复杂多途扩展以及多普勒频移等影响,导致无间断的可靠联通难以维持,影响水声定位性能。
发明内容
本发明的目的是:针对现有技术中受制于海洋环境和水下航行器的工况,声波在水中的传播会受到高噪声、复杂多途扩展以及多普勒频移等影响,导致无间断的可靠联通难以维持,影响水声定位性能的问题,提出一种基于惯性信息辅助的水声信道跟踪与预测方法
本发明为了解决上述技术问题采取的技术方案是:
一种基于惯性信息辅助的水声信道跟踪与预测方法,包括以下步骤:
步骤一:利用安装在航行器中的超短基线与海底应答器进行数据交互,进而对超短基线进行定位,所述应答器能够接收超短基线发送的询问信号,并向超短基线回复确知的参考信号;
步骤二:基于超短基线的定位结果并结合惯性导航系统,得到航行器的位置、速度和航向;
步骤三:根据参考信号和超短基线接收信号进行信道估计,得到信道冲激响应函数;
步骤四:根据步骤三得到的信道冲激响应函数,并结合航行器的位置、速度和航向,建立信道冲激响应函数变化与航行器的位置、速度以及航向的信道关系函数;
步骤五:当超短基线无法正常工作时,获取惯性导航系统当前时刻输出的航行器的位置、速度和航向;
步骤六:根据步骤二中得到的航行器的位置、速度和航向,并结合信道冲激响应函数以及步骤五中得到的惯性导航系统当前时刻输出的航行器的位置、速度和航向通过步骤四中得到的信道关系函数以维纳滤波的方式对当前声信道进行预测。
进一步的,所述惯性导航系统包括陀螺组件和加速度计组件。
进一步的,所述步骤一中对超短基线进行定位的表达式为:
其中,
进一步的,所述步骤二的具体步骤为:
首先根据超短基线定位结果
进一步的,所述步骤三的具体步骤为:根据参考信号和超短基线接收信号并采用最小均方误差准则得到信道冲激响应函数。
进一步的,所述信道冲激响应函数表示为:
其中:X为参考信号,y为超短基线接收信号,R
进一步的,所述步骤四中信道关系函数表示为:
其中,z
进一步的,所述步骤六中以维纳滤波的方式对当前声信道进行预测表示为:
h(t
其中,R为在超短基线正常工作期间任意两个时刻的关系函数,r为在超短基线正常工作期间任意时刻与当前时刻的关系函数,h(t
本发明的有益效果是:
本申请将惯性/超短基线组合,利用惯性信息反哺水声接收机,通过惯导的短时精度保持能力,对当前声信道进行预测,累积多途能量,有助于水声接收机抑制环境噪声、提高参数估计精度以及保持声链路的联通,提升超短基线定位的稳健性。
附图说明
图1为惯导/超短基线组合导航系统示意图;
图2为惯导/超短基线组合导航定位数据融合原理图;
图3为信道跟踪与预测示意图;
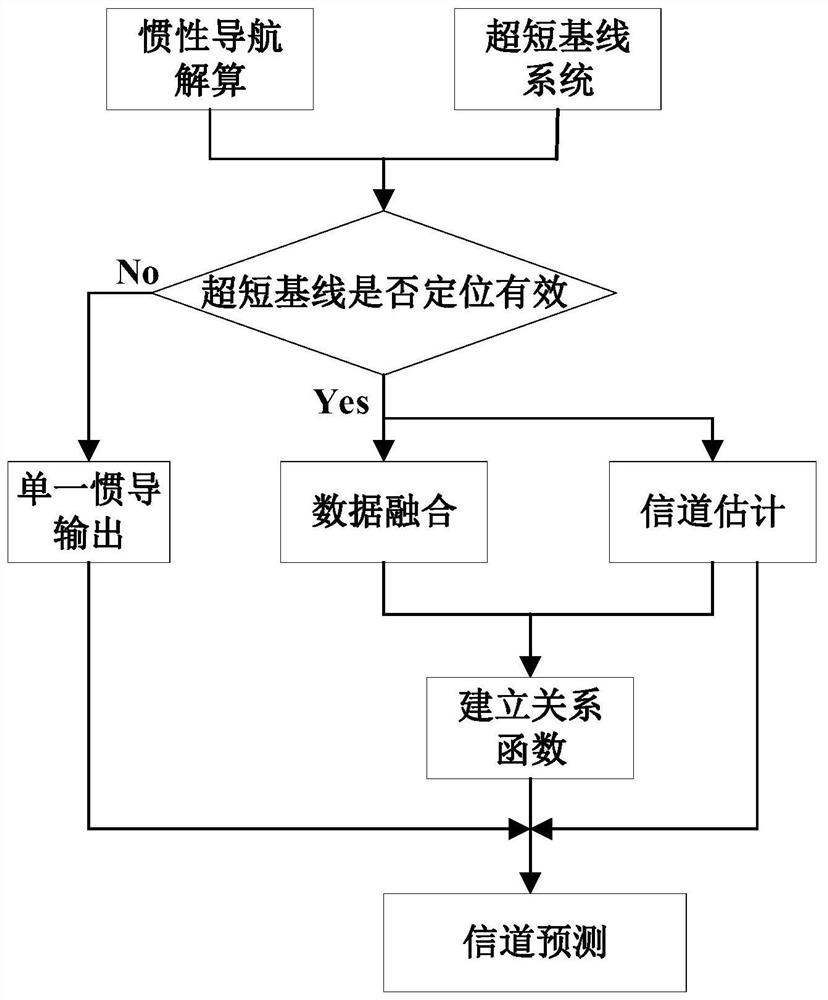
图4为本申请的整体流程图。
具体实施方式
需要特别说明的是,在不冲突的情况下,本申请公开的各个实施方式之间可以相互组合。
具体实施方式一:参照图1至图4具体说明本实施方式,本实施方式所述的一种基于惯性信息辅助的水声信道跟踪与预测方法,包括以下步骤:
步骤一,在超短基线正常工作期间,根据安装在航行器的超短基线与海底应答器进行数据交互,得到超短基线定位结果;
步骤二,根据步骤一中超短基线定位结果,结合惯性导航系统提供航行器的姿态、位置信息,通过惯导/超短基线组合导航的方式,确定组合导航输出位置、速度和航向信息;
步骤三,在步骤一超短基线正常工作基础上,根据参考信号和超短基线接收信号进行信道估计,建立信道冲激响应函数;
步骤四,根据步骤三中所得的信道冲激响应函数,结合步骤二中的组合导航输出信息,建立信道冲激响应函数变化与航行器位置、速度、航向的关系函数;
步骤五,在超短基线无法正常工作期间,惯导在短时间内具有较高定位精度,为航行器提供位置、速度、加速度信息;
步骤六,在步骤五超短基线无法正常工作基础上,根据步骤三所得的信道冲激响应函数,结合步骤二所得组合导航的位置、速度、航向信息和步骤五中当前惯导信息,通过步骤四中信道的关系函数,以维纳滤波的方式对当前声信道进行预测。
所述的信道跟踪是指在信道连续变化的情况下利用信道跟踪算法实时更新信道状态信息的方法,在这篇专利中指的就是,在超短基线失效时,预知冲激响应函数情况下(即步骤三),借助惯导信息,利用维纳滤波对信道的预测。是和预测并列的。
本申请的思路是:若预知信道冲激响应函数,则可消除复杂多途以及多普勒频移产生的影响,因此通过惯性/超短基线组合的方式,以惯性信息反哺水声接收机,利用惯导的短时精度保持能力,有助于水声接收机抑制环境噪声、提高参数估计精度以及保持声链路的联通,提升超短基线定位的稳健性。
具体实施方式二:本实施方式与具体实施方式一不同的是:所述步骤一中,根据超短基线与应答器进行数据交互,超短基线声学位置解算模型为:
建立基阵坐标系a,以声学基阵中心为原点o
应答器在基阵坐标系下的位置
其中:R为声信号在水下航行器和应答器之间的传播距离,
其中,c是水中声速,通过声线跟踪技术获得;τ
具体实施方式三:本实施方式与具体实施方式二不同的是:所述步骤二中,超短基线正常工作条件下,惯导/超短基线组合导航具体实现方案为:
建立载体坐标系b,选取“右-前-上”右手坐标系,坐标原点位于载体的质心,坐标轴x
建立导航坐标系n,一般选用地理坐标系,用“东-北-天”右手坐标系定义,东北天的原点位于载体质心,x
定义计算导航坐标系n′,在惯导更新算法中,用数学平台搭建的计算导航坐标系系,与导航坐标系之间存在失准角误差。
超短基线对应答器的位置解算模型为:
其中,
根据超短基线解算的基阵坐标系下信标的位置
超短基线在计算导航坐标系下对航行器的定位结果为:
则USBL的定位误差ΔX
其中,φ=[φ
则惯导/超短基线组合导航滤波观测量Z为:
其中,ΔX
选取惯导在导航坐标系中的姿态误差、速度误差、位置误差以及陀螺漂移误差和加速度计偏置误差组成状态变量,则扩展卡尔曼滤波器的状态方程为:
X
其中,X
扩展卡尔曼滤波器的观测方程为:
Z
其中:Z
通过扩展卡尔曼滤波进行组合导航数据融合,采用间接滤波开环修正方式,利用状态估计值直接修正惯导误差,最终获得修正后的导航输出结果。
具体实施方式四:本实施方式与具体实施方式三不同的是:所述步骤三的具体过程为:在定位导航过程中,超短基线同时完成航行器位置解算和信道估计,根据参考信号和超短基线接收信号,采用最小均方误差准则得到信道冲激响应的估计值为:
其中:X为参考信号,y为超短基线接收信号,R
具体实施方式五:本实施方式与具体实施方式四不同的是:所述步骤四的具体过程为:
当水声信道中的散射体呈均匀分布时,信道冲激响应在任意两个时刻的相关系数的具体公式为:
其中,z
具体实施方式六:本实施方式与具体实施方式五不同的是:所述步骤五的具体过程为:
在超短基线无法正常工作期间,组合导航信息由惯导单独提供,惯导在短时间内具有较高定位精度,根据步骤二中组合导航输出,结合惯导更新算法,得到当前时刻航行器的速度、位置和航向信息;
惯导速度更新算法由比力方程进行积分求解:
其中,
惯导速度更新结果为:
其中,
位置更新算法由位置微分方程进行积分求解,位置更新结果为:
其中,
具体实施方式七:本实施方式与具体实施方式六不同的是:所述步骤六的具体过程为:
根据步骤四中所得的信道关系函数,结合步骤五中当前时刻惯导输出的位置和步骤二中超短基线正常工作期间航行器的位置,通过计算信道当前时刻的关系函数,采用维纳滤波的方式估计当前时刻的信道冲激响应为:
h(t
其中,R为在超短基线正常工作期间任意两个时刻的关系函数,r为在超短基线正常工作期间任意时刻与当前时刻的关系函数,h(t
需要注意的是,具体实施方式仅仅是对本发明技术方案的解释和说明,不能以此限定权利保护范围。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应落入本发明的保护范围内。
- 一种基于惯性信息辅助的水声信道跟踪与预测方法
- 一种基于惯性信息辅助与参数估计的GNSS反欺骗环路跟踪方法