一种仿生无人机
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及智能飞行器技术领域,具体是指一种仿生无人机。
背景技术
无人机作为一种成本低、体积小、灵活性好的飞行器,正被应用到越来越多的领域,例如民用领域的视频拍摄、遥感测绘、地形勘探、快递运送、电力巡查、作物监测等,军用领域的战场侦察和监视、定位校射、毁伤评估、电子战等。随着应用的发展,用户对于无人机的需求也越来越高。现有的无人机大部分不可轻易拆卸,不方便收纳携带。
所以,一种方便收纳且飞行效果佳的仿生无人机成为人们亟待解决的问题。
发明内容
本发明要解决的技术问题是现有的无人机不便拆卸收纳,质量过大,较为笨重的问题。
为解决上述技术问题,本发明提供的技术方案为:一种仿生无人机,包括机身、机翼、螺旋桨以及机尾;所述螺旋桨设置于机身前端,所述机翼关于机身两侧对称设置,所述机尾设置于机身后部;所述机身两侧对称设有卡条,所述卡条前部与后部均设有卡扣,所述机翼通过卡扣、卡条与机身连接;所述机身内部设有动力电机、电池以及方向控制装置,所述方向控制装置包括第一伺服电机、传动装置以及第二伺服电机;所述第一伺服电机与传动装置齿轮连接,所述第二伺服电机设置于传动装置上与机尾齿轮连接;所述机尾包括平衡球与尾翼,所述平衡球与第二伺服电机齿轮连接,所述传动装置与平衡球转动连接,所述尾翼与平衡球插接。
作为改进,所述传动装置包括转动轴、连接杆以及U型架,所述第一伺服电机与转动轴一端齿轮连接,所述连接杆一端连接转动轴中部,另一端连接U型架;所述第二伺服电机固定于U型架一侧与平衡球齿轮连接,所述U型架两侧套于平衡球外侧并与平衡球转动连接。
作为改进,所述机翼包括主翼与副翼;所述主翼通过卡扣连接机身,所述副翼设置于主翼末端并与主翼铰接。
作为改进,所述主翼包括主翅与副翅,所述主翅与副翅连接处共用一个梁结构,所述副翅为爪型梁结构。
作为改进,所述机身顶部设有励磁开关,所述励磁开关底部连接弹簧,所述弹簧下端固定于机身底部,所述励磁开关连接传动杠杆,所述传动杠杆呈L型,所述传动杠杆关于励磁开关对称设置,所述机身底部设有固定套,所述机身两侧对称设有开孔,所述传动杠杆穿过固定套与开孔连接副翼的铰接轴。
作为改进,所述铰接轴内设有拔插孔,所述传动杠杆末端插入拔插孔。
作为改进,所述尾翼中部设有轴向梁,所述轴向梁两侧对称设有翼边梁,所述轴向梁与翼边梁连接构成尾翼的梁结构。
作为改进,所述机翼与尾翼外部均采用纳米涂层薄布覆盖。
本发明与现有技术相比的优点在于:本发明采用前掠大面积翼展结构,可以用较小的动力,换取长时间的滞空能力;机翼全部采用纳米涂层薄布覆盖,机身轻,提高载荷比;由于机翼与机身通过卡扣连接,尾翼与平衡球插接,可以拆卸,大大缩小了无人机的体积;副翅和尾翼仿蝙蝠身体结构,用二个伺服电机单独控制。
附图说明
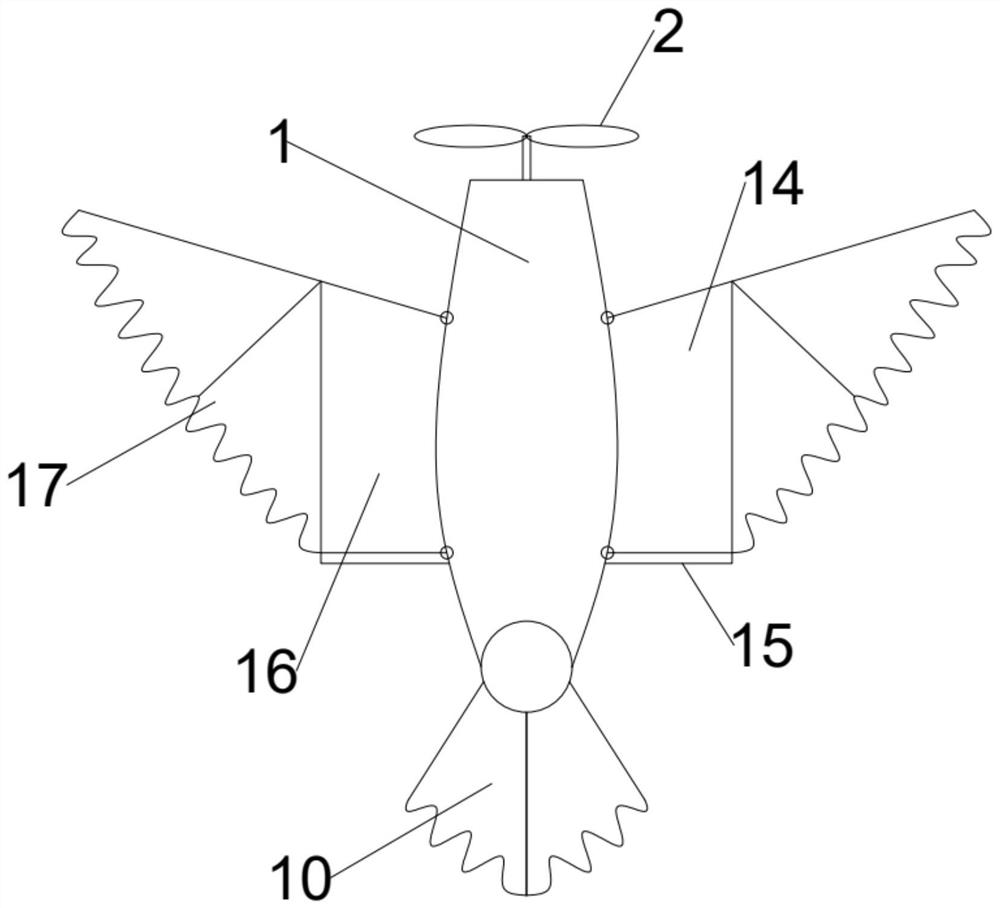
图1是本发明一种仿生无人机的外部结构示意图。
图2是本发明一种仿生无人机的内部结构示意图。
图3是本发明一种仿生无人机的方向控制装置结构示意图。
图4是本发明一种仿生无人机的图2中A处结构放大图。
图5是本发明一种仿生无人机的副翼传动结构示意图。
图6是本发明一种仿生无人机的右视图。
图7是本发明一种仿生无人机的主翼与副翼铰接结构示意图。
如图所示:1、机身,2、螺旋桨,3、卡条,4、卡扣,5、动力电机,6、电池,7、第一伺服电机,8、第二伺服电机,9、平衡球,10、尾翼,11、转动轴,12、连接杆,13、U型架,14、主翼,15、副翼,16、主翅,17、副翅,18、励磁开关,19、弹簧,20、传动杠杆,21、固定套,22、开孔,23、铰接轴,24、拔插孔,25、轴向梁,26、翼边梁。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,“第一特征”、“第二特征”可以包括一个或者更多个该特征。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
下面结合附图对本发明一种仿生无人机做进一步的详细说明。
结合附图1-7,对本发明进行详细介绍。
一种仿生无人机,包括机身1、机翼、螺旋桨2以及机尾;所述螺旋桨2设置于机身1前端,所述机翼关于机身1两侧对称设置,所述机尾设置于机身1后部;所述机身1两侧对称设有卡条3,所述卡条3前部与后部均设有卡扣4,所述机翼通过卡扣4、卡条3与机身1连接;所述机身1内部设有动力电机5、电池6以及方向控制装置,所述方向控制装置包括第一伺服电机7、传动装置以及第二伺服电机8;所述第一伺服电机7与传动装置齿轮连接,所述第二伺服电机8设置于传动装置上与机尾齿轮连接;所述机尾包括平衡球9与尾翼10,所述平衡球9与第二伺服电机8齿轮连接,所述传动装置与平衡球9转动连接,所述尾翼10与平衡球9插接。
所述传动装置包括转动轴11、连接杆12以及U型架13,所述第一伺服电机7与转动轴11一端齿轮连接,所述连接杆12一端连接转动轴11中部,另一端连接U型架13;所述第二伺服电机8固定于U型架13一侧与平衡球9齿轮连接,所述U型架13两侧套于平衡球9外侧并与平衡球9转动连接。
所述机翼包括主翼14与副翼15;所述主翼14通过卡扣4连接机身1,所述副翼15设置于主翼14末端并与主翼14铰接。
所述主翼14包括主翅16与副翅17,所述主翅16与副翅17连接处共用一个梁结构,所述副翅17为爪型梁结构。
所述机身1顶部设有励磁开关18,所述励磁开关18底部连接弹簧19,所述弹簧19下端固定于机身1底部,所述励磁开关18连接传动杠杆20,所述传动杠杆20呈L型,所述传动杠杆20关于励磁开关18对称设置,所述机身1底部设有固定套21,所述机身1两侧对称设有开孔22,所述传动杠杆20穿过固定套21与开孔22连接副翼15的铰接轴23。
所述铰接轴23内设有拔插孔24,所述传动杠杆20末端插入拔插孔24。
所述尾翼10中部设有轴向梁25,所述轴向梁25两侧对称设有翼边梁26,所述轴向梁25与翼边梁26连接构成尾翼10的梁结构。
所述机翼与尾翼10外部均采用纳米涂层薄布覆盖。
本发明一种仿生无人机的具体实施过程如下:
启动无人机,通过电池6供电,动力电机5提供升空动力,无人机的副翅17与尾翼10均为仿蝙蝠身体结构,无人机升空时机翼与尾翼10上的纳米涂层薄布因空气阻力呈下凹状态,卡条3将纳米涂层薄布与机身1连接处压紧,尾翼10的轴向梁25与翼边梁26形状不变,纳米涂层薄布边缘略微下凹形成自然气道,升空过程中励磁开关18吸合,弹簧19拉伸,通过传动杠杆20在固定套21内转动使铰接轴23转动带动副翼15转动下翻;第一伺服电机7控制尾翼10的左右平衡,第二伺服电机8控制尾翼10的上下平衡,平衡球9为空心球,与第一伺服电机7和第二伺服电机8配合控制无人机的整体平衡;无人机正常飞行时,励磁开关18断电,弹簧19拉动使其分开,传动杠杆20在固定套21内反向转动使铰接轴23转动带动副翼15转动上翻至初始位置;无人机降落时,机翼与尾翼10的纳米涂层薄布因空气阻力向上凸起,卡条3将纳米涂层薄布与机身1连接处压紧,尾翼10的轴向梁25与翼边梁26形状不变,纳米涂层薄布边缘略微向上凸起形成自然气道,下降过程中励磁开关18吸合,弹簧19拉伸,通过传动杠杆20在固定套21内转动使铰接轴23转动带动副翼15转动下翻;使用完毕后拆开卡扣4,将铰接轴23与传动杠杆20拆开后拆掉机翼,将尾翼10从平衡球9中拔出,减小无人机的体积,放进收纳盒中收纳。
附图中副翅17与尾翼10末端波浪线为纳米涂层薄布的布边且布边下方没有梁结构。
由于该无人机取消了垂直尾翼10,因而减少反射面,同时机翼采用纳米涂层薄布,吸收雷达波,从而达到隐身的效果。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 瓢虫鞘翅耦合机制仿生减震装置、无人机起落架及无人机
- 一种基于LGMD的无人机仿生避障控制系统和方法