工程图自动辨识系统及方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明关于一种辨识系统及方法,特别是关于一种工程图自动辨识系统及方法。
背景技术
随着信息科技的进步,传统制造业的加工也由人工操作逐渐转变为计算机控制。粗略来说,加工所需的工程图纸无论是以人力操作加工机台或以电脑控制,目前大多需要人工读图,以撷取必要的关键参数及特定加工要求。
换言之,绝大部分的制品工程图是以绘图软件绘制,其中在制品工程图中除了制品规格之外,还包括其他加工需求等信息。当绘制完成的制品工程图发送至生产车间进行生产制造之前,通常需要专业人员剖析制品工程图的图片信息,并且需要另外归纳及撷取制品工程图的结构信息及加工需求等庞杂信息。
举例来说,一般制品工程图通常包括上百个单位的结构信息及至少一种额外的加工需求,倘若均以专业人员于加工生产前进行剖析,则需要数小时甚至数天的时间方能完成。然而,在竞争激烈的时代,上述方式已逐渐无法满足上下游供应链的需求,因此目前急需一种新颖的制品工程图剖析系统及方法,以解决上述耗时费工的问题。
发明内容
有鉴于此,本发明提供一种工程图自动辨识系统及方法,通过能自动分析工程图及结构单元的图片分析模块,可快速取得对应于所述工程图的多种图片信息,因此能为相关产业带来更多的效益。
本发明的一目的在于提供一种工程图自动辨识系统,其包括一运算装置、一图片拆解模块及一图片分析模块。其中,所述图片拆解模块执行于所述运算装置,所述图片拆解模块将一工程图拆解成为多个结构单元,且将所述多个结构单元依至少一个几何特征进行分类;所述图片分析模块执行于所述运算装置,所述图片分析模块分析所述工程图及所述多个结构单元,以取得对应于所述工程图的多种图片信息。
本发明之另一目的在于提供一种工程图自动辨识方法,其包括至少以下步骤:
提供一运算装置,所述运算装置包括一图片拆解模块及一图片分析模块;
执行所述图片拆解模块,将一工程图拆解成为多个结构单元,且将所述多个结构单元依至少一个几何特征进行分类;
执行所述图片分析模块,分析所述工程图及所述多个结构单元,以取得对应于所述工程图的多种图片信息。
本发明之效果在于,通过能自动分析工程图及结构单元的图片分析模块,可快速取得对应于所述工程图的多种图片信息,因此能减少耗时费工的人力判读,以提高工程图的分析效率,进而为相关产业带来更多的帮助。
附图说明
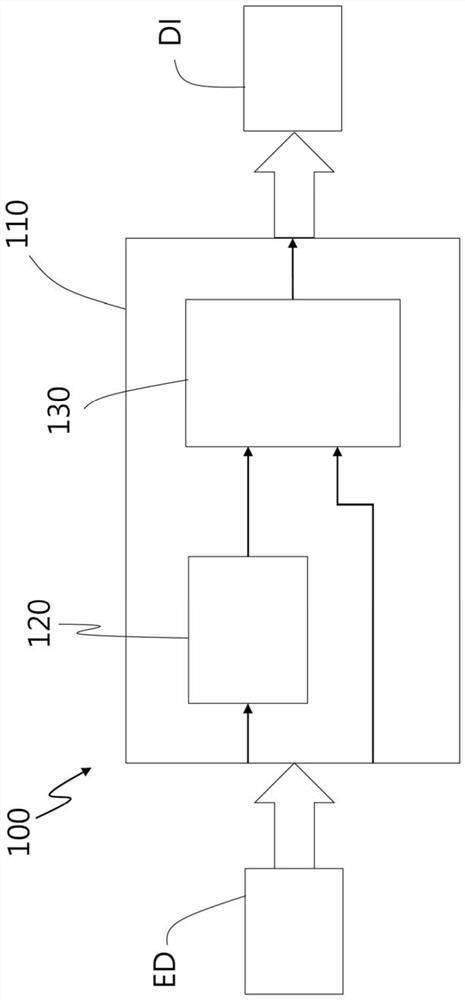
图1是根据本发明一实施例的工程图自动辨识系统的方块图。
图2是根据本发明一实施例的工程图自动辨识方法的流程图。
图3是根据本发明一实施例的工程图自动辨识方法的决策图。
图4是根据本发明另一实施例的工程图自动辨识方法的决策图。
图5是根据本发明再一实施例的工程图自动辨识方法的决策图。
图6是根据本发明再一实施例的工程图自动辨识方法的决策图。
图7是根据本发明再一实施例的工程图自动辨识方法的决策图。
具体实施方式
以下将配合本发明的具体实施例及附图说明本发明之工程图自动辨识系统及方法,然本发明的具体实施例及附图是用于阐明本发明之精神,使其更容易理解,并非用以限制本发明之专利范围。
请参考图1,本发明实施例提供一种工程图自动辨识系统100,其包括一运算装置110、一图片拆解模块120及一图片分析模块130。其中,所述图片拆解模块120执行于所述运算装置110,且一工程图ED输入于所述运算装置110中。所述图片拆解模块120将所述工程图ED拆解成为多个结构单元(未图示),且将所述多个结构单元依至少一个几何特征进行分类。
在本发明实施例中,所述多个结构单元包括所述工程图ED所呈现的基本线条型态,例如垂直线、水平线、弧线、圆形或其组合,但不以此为限制,在此并未穷举所有基本线条型态。在本发明实施例中,所述至少一个几何特征包括上述基本线条型态,并且将所述多个结构单元依上述基本线条型态进行分类,例如将所述工程图ED上的垂直线归为第一类,将所述工程图ED上的水平线归为第二类,将所述工程图ED上的弧线归为第三类,和/或将所述工程图ED上的圆形归为第四类,但不以此为限制。
在本发明实施例中,所述多个结构单元除了依上述基本线条型态进行分类之外,还进一步依功能性与目的性加入群组。例如,将所述多个结构单元依图框所属位置,进行预分类;再将所述多个结构单元加入俯视图、侧视图、局部放大图或其组合之群组。又例如为了寻找所述多条弧,其起始终点角度大于180度,必须逐一检视所有弧,并予以加入一新群组中。通过依功能性组成群组,可提升自动读图的精确性与降低程序出错机率。
在图1中,所述图片分析模块130执行于所述运算装置110,所述图片分析模块130分析所述工程图ED及所述多个结构单元,以取得对应于所述工程图ED的多种图片信息DI。在本发明实施例中,所述图片分析模块130讯号连接于所述图片拆解模块120,使得所述图片拆解模块120所拆解的所述多个结构单元可直接传递至所述图片分析模块130中并直接进行分析,进而简化信息传递的流程及提升数据分析的效率。
在本发明实施例中,所述图片分析模块130包括辨识所述工程图ED的一俯视图、一侧视图、至少一个局部放大图、至少一个文字、至少一个符号、至少一个数值或其组合。在本发明实施例中,所述图片分析模块130所取得对应于所述工程图ED的所述多种图片信息DI包括多个工件结构特征、至少一个加工需求或其组合,其中所述工件结构特征包括所述工程图的一工件俯视图、一工件侧视图、至少一个局部放大图、至少一个文字、至少一个符号、至少一个数值或其组合。在本发明实施例中,所述图片分析模块130包括将所述俯视图及所述侧视图的至少一个共同参数进行比对,以确认所述共同参数是否一致,以及所述俯视图及所述侧视图是否有等比例放大的条件;举例来说,以所述工件的外径尺寸做为所述共同参数时,由所述图片分析模块130分析的所述工件俯视图及所述工件侧视图的外径尺寸应一致,且所述工程图ED中所标注的外径数值则可换算所述俯视图及所述侧视图等比例放大的倍数。
举例来说,所述工程图ED上呈现有一制品的一工件俯视图、一工件侧视图、至少一个局部放大图、至少一个文字、至少一个符号、至少一个数值或其组合,而所述图片分析模块 130通过辨识所述俯视图、所述侧视图、所述局部放大图的结构特征、辨识文字、符号、数字或其组合的方式,进而区分出所述工程图ED上各个区块分别表示所述工件结构特征的种类。
请一并参考图1及图2,一种工程图自动辨识方法,至少包括以下步骤:
步骤S01、提供上述运算装置110,所述运算装置110包括上述图片拆解模块120及上述图片分析模块130;
步骤S02、执行所述图片拆解模块120,将上述工程图ED拆解成为多个结构单元(未图示),且将所述多个结构单元依至少一个几何特征进行分类;
步骤S03、执行所述图片分析模块130,分析所述工程图ED及所述多个结构单元,以取得对应于所述工程图ED的多种图片信息DI。
在本发明实施例中,分析所述工程图及所述多个结构单元包括识别所述工程图ED中的俯视图区块、识别所述工程图ED中的侧视图区块、以及识别所述工程图ED中的制品种类或工件种类。
接着举本发明的一实施例说明工程图ED中的俯视图区块的判断方式。如图3所示,当所述工程图ED为一制作光学组件的模仁工程图或一光学镜片的工程图时,所述模仁工程图或所述光学镜片工程图的俯视图具有一俯视图中心,而所述俯视图中心是找出工程图上最多圆的区块。在本发明其他实施例中,也可以找出工程图上最多弧线之圆心的区块。在本发明其他实施例中,若最多弧线之圆心的区块内没有完整的圆形,则判断此区块并非俯视图,另外辨识可形成完整圆形且弧线之圆心第二多的区块。
值得一提的是,识别所述工程图ED中的俯视图区块更可进一步包括判断模仁外径、判断非球面部口径、判断放大倍率、判断有无D形切面(D-cut)、判断有无浇口、判断有无流道、判断有无顶针、判断排气设计或其组合。其中,判断有无浇口更可包括判断浇口数量、尺寸及/或位置;判断有无流道更可包括判断流道数量、尺寸及/或位置;判断有无顶针更可包括判断顶针数量、尺寸、及/或位置。
接着举本发明的另一实施例说明工程图ED中的侧视图区块的判断方式。如图4所示,当所述工程图ED为所述制作光学组件的模仁工程图时,所述模仁工程图具有一模仁侧视图,且所述模仁侧视图的区块中具有各种方向的线条,例如多条垂直线、多条水平线、至少一条弧线、至少一条曲线或其组合,且所述多条线条可连接构成一封闭图案,而所述封闭图案即为所述模仁侧视图,但不以此为限制。
值得一提的是,识别所述工程图ED中的侧视图区块亦可由其于所述工程图ED的所在位置判断,例如侧视图区块通常会邻近俯视图区块,因此可通过判断位于所述俯视图块上方、下方、左侧、右侧的图块是否由多条垂直线及多条水平线所构成的封闭图案,来辨识所述工程图ED中的侧视图区块,但不以此为限制。
除此之外,由工程图ED中的俯视图的工件外径及侧视图的工件外径进行比对,亦可确认工程图ED中的俯视图区块及侧视图区块的所在位置及相关信息,但不以此为限制。
接着举本发明的再一实施例说明所述工程图ED中的工件种类的判断方式。如图5所示,当所述工程图ED为所述制作光学组件的模仁工程图或所述光学镜片的工程图时,可由所述工程图ED中的所述俯视图区块、所述侧视图区块或其组合中的至少一个结构特征判断所述工件种类。在本发明实施例中,所述工件种类例如可为制作光学组件的模具种类,包括入子模仁、间隔物模仁、镜片模仁或其组合。在本发明实施例中,入子模仁是指制作镜头镶件或镜头壳体的模仁。
在本发明的一实例中,根据所述工程图ED中的俯视图区块的同心圆数量是否大于默认值,以判断所述工件种类是否为入子模仁,如图5所示;在本实例中,当所述工件种类为入子模仁时,所述工程图ED中的俯视图区块具有多个的同心圆结构,因此可根据同心圆的数量作为判断所述工件种类是否为入子模仁的依据。在本发明的另一实例中,根据所述工程图 ED中的俯视图区块的弧线及云形线之总数是否小于默认值,以判断所述工件种类是否为入子模仁,如图6所示;图6的实例与图5的实例的判断方式彼此互补,当所述工件种类为入子模仁时,所述工程图ED中的俯视图区块具有多个的同心圆结构,因此同心圆数量多时,将使弧线及云形线之总数减少,甚至没有弧线及云形线,故此图6的实例可根据弧线及云形线之总数作为判断所述工件种类是否为入子模仁的依据。在本发明的再一实例中,根据所述工程图ED中的侧视图区块的阶级数量是否大于默认值,以判断所述工件种类是否为入子模仁,如图7所示;在本实例中,当所述工件种类为入子模仁时,所述工程图ED中的侧视图区块具有多阶的阶梯状结构,因此可根据侧视图的阶级数量作为判断所述工件种类是否为入子模仁的依据。
在图5至图7中,根据所述工程图ED中的所述侧视图区块或局部放大侧视图区块中之顶缘中心区域是否具有云形线以判断所述工件种类是否为间隔物模仁或镜片模仁。在本发明实施例中,云形线是指通过或靠近一系列指定点的光滑曲线。
在图5至图7中,判断所述工程图ED中的所述侧视图区块是否包含完整的光学镜片双面特征,即意谓所述工程图ED中的所述侧视图区块可区分成两个完整的单面特征,每个单面特征包含光学镜片应有的避空台阶、承靠面、透镜区域或其组合。若所述工程图ED中的所述侧视图区块包含完整的光学镜片双面特征,则可判断所述工程图ED为一光学镜片工程图。在本发明的实例中,当工程图ED为一光学镜片工程图时,所述光学镜片工程图的透镜区域是以云形线、弧或其组合表示,但不以此为限制。
通过本发明的上述实施例,所述图片分析模块能自动分析工程图及结构单元,以快速取得对应于所述工程图的多种图片信息,因此能减少耗时费工的人力判读,以提高工程图的分析效率,进而为相关产业带来更多的帮助。
附图标记说明
100:工程图自动辨识系统
110:运算装置
120:图片拆解模块
130:图片分析模块
ED:工程图
DI:图片信息
S01、S02、S03:步骤。
- 工程图自动辨识系统及方法
- 自动设计和调整工程图形系统及其建立方法及其使用方法