出炉机器人一拖多转运装置
文献发布时间:2023-06-19 12:18:04
技术领域
本申请涉及冶炼设备领域,尤其是涉及出炉机器人一拖多转运装置。
背景技术
在现今冶炼硅铁出炉设备中,特别是连续冶炼设备中,常用设备型号为一台硅铁冶炼炉炉眼对应三台或更多台开眼设备,但在实际运行过程中,每个炉眼开眼周期都在20天左右,开眼周期的空置期较长,这会造成硅铁开炉眼设备使用率低、设备严重浪费等问题。
申请号201810195441.X的发明专利申请公开了一种硅铁出炉机器人工位切换转运方法,通过出炉机器人的在轨道的移动和自身升降、旋转等完成多个工位切换转运,出炉系统对称设置与硅铁炉两侧,每套出炉系统负责两个出炉口作业。
但以上的硅铁出炉机器人工位切换转运方法在实际使用中,依然存在开炉眼设备使用率较低的问题,因此,本申请的目的在于进一步优化硅铁炉开炉系统。
发明内容
鉴于现有技术中存在的不足和缺陷,本申请的目的在于提供一种出炉机器人一拖多转运装置,可将一台硅铁出炉机器人通过转运车运到硅铁炉的三个或更多个眼位。
出炉机器人一拖多转运装置,包括炉体,所述炉体的边缘开设多个沿着炉体周向方向间隔布置的出炉炉眼,出炉机器人一拖多转运装置包括转运车轨道,所述转运车轨道围绕所述炉体的外侧环形设置,所述出炉炉眼的位置对应设置有出炉机器人轨道,所述出炉机器人轨道垂直于转运车轨道并在相交处轨道相接;所述转运车轨道上安装转运车,所述转运车上安装出炉机器人。
通过采用上述技术方案:一个炉体只需一个出炉机器人,通过工位旋转和移动即可完成多个炉眼,例如三个或四个炉眼的开炉工作,出炉机器人轨道和转运车轨道相交处轨道相接,便于出炉机器人切换轨道进行材料运输。
进一步地,所述转运车包括车框架,所述车框架两侧设置侧支撑板,所述侧支撑板上设置与车框架平行的车轮支架,所述车轮支架两端安装转运车轮,所述转运车轮均位于侧支撑板外侧;在一侧的所述转运车轮上设置驱动电机,所述侧支撑板顶部设置行走轨道。
进一步地,所述行走轨道包括位于内侧的内轨道和位于外侧的外轨道,所述外轨道外侧端面设置齿轮,所述齿轮与出炉机器人底部行走齿轮匹配;所述内轨道、外轨道与侧支撑板之间设置垫片。
通过采用上述技术方案:垫片的加设可以使行走轨道更稳固的安装于侧支撑板上,给行走轨道和侧支撑板提供足够的缓冲,外轨道外侧端面设置与出炉机器人匹配的齿轮,行走轨道顶部留出用于加固的操作空间。
进一步地,所述内轨道和外轨道通过螺栓紧固于侧支撑板上;所述内轨道采用M10螺栓;所述外轨道采用M12螺栓。
通过采用上述技术方案:内轨道和外轨道分别使用不同型号螺栓,外轨道由于直接受力,使用强度更大的螺栓以保证行走轨道结构稳定。
进一步地,每个转运车上设置不少于两对转运车轮。
进一步地,每条所述行走轨道末端外侧均设置机器人限位块。
通过采用上述技术方案:机器人限位块可以使出炉机器人的定位更加准确,防止产生轨道滑脱。
进一步地,所述侧支撑板采用工字钢。
进一步地,所述驱动电机下方设置安装板(508),所述安装板(508)底面与侧支撑板位于同一平面上。
进一步地,每对所述转运车轮的轮间距为1700mm;同侧所述转运车轮的跨度为1400mm。
综上所述,本申请具有如下有益效果:
本申请所述的出炉机器人一拖多转运装置实现了一台硅铁出炉机器人开一台硅铁炉三个炉眼或更多个炉眼的功能,节省了两台或更多台硅铁出炉机器人,节省了企业的设备生产成本且避免了设备空置造成的折旧损耗;通过一条圆形转运车轨道完成整个炉体的材料运输工作,无需对接外部吊装等辅助设备,生产线运转更加流畅。
附图说明
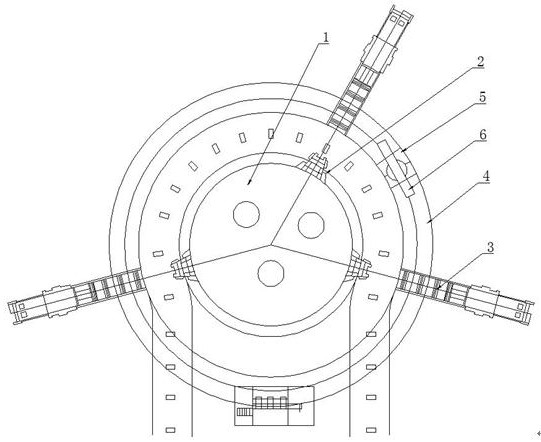
图1为本申请现场布置图;
图2为本申请转运车立体图;
图3为本申请转运车主视图;
图4为本申请转运车俯视图;
图5为本申请转运车侧视图;
图6为A处局部放大图。
附图标记说明:
1、硅铁冶炼炉炉体;2、出炉炉眼;3、出炉机器人轨道;4、转运车轨道;5、转运车;501、车框架;502、转运车轮;503、驱动电机;504、机器人限位块;505、侧支撑板;506、车轮支架;507、行走轨道;5071、内轨道;5072、外轨道;5073、螺栓;5074、垫片;5075、齿轮;508、安装板;6、出炉机器人。
具体实施方式
以下结合附图对本申请进行进一步的详细说明。参考图1,本申请公开了一种出炉机器人一拖多转运装置,包括硅铁冶炼炉炉体1,所述硅铁冶炼炉炉体1边缘开设多个出炉炉眼2,图1以三个炉眼为例具体说明,实际生产过程中,四个、五个甚至更多炉眼的情况所利用的原理相同。所述出炉炉眼外部设置转运车轨道4,所述转运车轨道4围绕硅铁冶炼炉炉体1外侧呈环形设置,所述出炉炉眼2位置对应设置出炉机器人轨道3,所述出炉机器人轨道3垂直于转运车轨道4并在相交处二者轨道相接;所述转运车轨道4上安装转运车5,所述转运车5上安装出炉机器人6,所述出炉机器人6为现有技术,可在转运车上实现360°转动。
参考图2-6,所述转运车5包括车框架501,所述车框架501两侧设置侧支撑板505,为保证结构稳固,所述侧支撑板505采用工字钢;所述侧支撑板505上设置与车框架501平行的车轮支架506,所述车轮支架506两端安装转运车轮502,每个转运车5上设置不低于两对转运车轮502,转运车轮502的数量与转运车轨道4的轨道数量和位置匹配即可。每对所述转运车轮502的轮间距为1700mm,即转运车5在转运车轨道4上的横跨距离为1700mm。所述转运车轮502的轮体宽度与转运车轨道4宽度匹配,同侧所述转运车轮502的跨度与转运车轨道4的间距均为1400mm。
所述转运车轮502均位于侧支撑板505外侧;在单侧的侧支撑板505上设置安装板508,所述安装板508底面与侧支撑板505位于同一平面上,安装板508上放置驱动电机503,用于驱动转运车5的移动。
所述侧支撑板505顶部设置行走轨道507,每条所述行走轨道507末端外侧均设置机器人限位块504,防止出炉机器人6启停定位不准,所述行走轨道507包括位于内侧的内轨道5071和位于外侧的外轨道5072,所述外轨道5072外侧端面设置齿轮5075,所述齿轮5075与出炉机器人6底部行走齿轮匹配;所述内轨道5071、外轨道5072与侧支撑板505之间设置垫片5074,起到缓冲减震作用。
所述内轨道5071和外轨道5072通过螺栓5073紧固于侧支撑板505上;所述内轨道5071采用M10螺栓;所述外轨道5072由于直接承载机器人压力所以采用强度更大的M12螺栓。
本申请的工作原理为:转运车轨道4围绕硅铁冶炼炉炉体1环形布置,在每个出炉炉眼2的位置布置有出炉机器人轨道3,转运车5在转运车轨道4上行驶,在出炉炉眼2位置所述转运车轨道4与出炉机器人轨道3相接,相接后出炉机器人轨道3与转运车5上的出炉机器人行走轨道507无缝对接。
在出炉机器人6完成硅铁炉其中一个出炉炉眼2的开眼、拉仟、堵眼工作后,将出炉机器人2运行到机器人限位块504处,出炉机器人6上部旋转90°,松开转运车5和出炉机器人轨道3,开启驱动电机503,转运车5带着出炉机器人6沿转运车轨道4行走,到达下一个出炉炉眼2位置后,转运车5的驱动电机503停止,此时夹紧转运车5和出炉机器人轨道3,出炉机器人6向出炉炉眼2反方向沿出炉机器人行走轨道507运行,随后出炉机器人6上部旋转90°,开始完成硅铁冶炼炉炉体1的另一个出炉炉眼2的开眼、拉仟、堵眼工作。
以上为本申请的较佳实施例,在不脱离本申请的设计思路、机械结构形式、智能驱动控制方式的所有改进和变化,均属于本申请的范围内。
- 出炉机器人一拖多转运装置
- 一种硅铁出炉机器人工位切换转运方法