一种高精度柔性智能传输平台系统
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及智能传输设备技术领域,具体涉及一种高精度柔性智能传输平台系统。
背景技术
传统的输送带和刚性的传送线灵活性差,难以适应定制化、柔性化的生产趋势。机械的磨损导致精度的偏差以及使用寿命的降低;机构臃肿使得系统设计和控制流程复杂;场景变更时的灵活适应性不足;很难实现高速高精度运动控制和复杂的场景动作。
公告号为CN 210882155 U的专利说明书公开了一种柔性传输的智能车,包括智能传输车主体,所述智能传输车主体的下方设置有调整板,所述智能传输车主体的底端焊接有支撑柱,所述智能传输车主体底端的左右两侧皆通过铰接轴与固定杆的一端相连接,所述支撑杆底端的前后两侧皆通过铰接轴与减震杆的一端相连接,所述支板的底端皆安装有轮毂。用户可以根据地形环境和工作需要对智能传输车主体的传输方向进行调整,提高智能传输车主体的实用性,使得用户在调整智能传输车主体方向时,不需要将该装置整个的调整,方便操作,通过两组弹簧的减小力对该装置造成的冲击,且减小晃动幅度,放置货物掉落,对货物造成损坏。
公告号为CN 208345072 U的专利说明书公开了智能柔性制造输送平台传输皮带座,包括模组A、模组B和模组C,所述模组A上设置有纵向导轨A和横向导轨A,所述纵向导轨A底部设置有导轨固定块,所述纵向导轨A上设置有电机固定板,所述横向导轨A上也设置有所述电机固定板,所述电机固定板固定连接有步进电机,所述纵向导轨A上设置有纵向同步带A,所述横向导轨A下方设置有上层固定板,所述上层固定板下方设置有底层固定板,所述上层固定板和所述底层固定板之间设置有直线轴承,所述模组B上设置有导轨B,所述导轨B下方设置有所述步进电机。有益效果在于:通过光电开关实现了个模组不同轨迹下的有序运行,智能化程度更高,提高了生产效率。
发明内容
本发明提供了一种高精度柔性智能传输平台系统,包括传输平台滑轨单元模块、动子托盘模块及导轨机构模块等;滑轨由导轨机构以及在其内部均匀串联分布的多组定子组成。
动子托盘中设计均匀分布的永磁体,与定子线圈共同作用产生推力,使托盘能够在整个导轨系统上的自由运动,实现加速、匀速、制动和定位等动作,实现了传输设备的功能,具有控制精度高,较大的运载能力以及较快的运行速度。
相较于传统的传输设备,本发明具有运行噪声低、爬坡能力强、转弯半径小、安全可靠性高、运营维护成本低的优势。
一种高精度柔性智能传输平台系统,包括:
传输平台滑轨,其内部设有若干个定子线圈,所述定子线圈分别独立外接相应可变电源;
动子托盘,安装在所述传输平台滑轨的上方、下方和/或侧面,可沿所述传输平台滑轨移动;所述动子托盘靠近所述传输平台滑轨的一侧设有若干个磁极异向交替排列的永磁体;所述动子托盘上设有用于位移测量的编码器标尺;
同步伺服控制系统,与所述可变电源连接,用于控制所述可变电源的供电参数;所述同步伺服控制系统包括工业控制器,所述工业控制器作为上位机通过EtherCAT总线与所述可变电源连接。
上述高精度柔性智能传输平台系统运行时,工业控制器通过EtherCAT总线控制所述可变电源的供电参数,进而改变各定子线圈中的电流,产生相应变化磁场,从而驱动所述传输平台滑轨上的动子托盘移动和停止。动子托盘上的编码器标尺可监测、反映动子托盘运动情况。
动子托盘中设计均匀分布的永磁体,与定子线圈共同作用产生推力。通过给不同的线圈施加不同的励磁电流的方式产生运动的磁场。这一运动的磁场推动着动子的永磁体一起运行,动子的推力大小通过调节线圈的励磁电流大小来实现。
作为优选,所述高精度柔性智能传输平台系统,所述定子线圈两侧设有用于感应动子托盘位置的传感器。
作为优选,所述高精度柔性智能传输平台系统,所述动子托盘上的永磁体之间的间隔满足每一时刻四个永磁体对应一个定子线圈。
作为优选,所述高精度柔性智能传输平台系统,所述传输平台滑轨包括若干个通过环形式滑轨、直线式滑轨、矩形式滑轨中的一种或多种拼接形成的轨道。
在一优选例中,所述高精度柔性智能传输平台系统,所述传输平台滑轨的材质为硬质氧化铝的铝型材,确保了动子托盘在运行时噪音非常小,以及保证良好的运行性能和低磨损,系统无需润滑。
在一优选例中,所述高精度柔性智能传输平台系统,所述动子托盘的材质为采用固态铝合金。
在一优选例中,所述高精度柔性智能传输平台系统,所述动子托盘通过滑轮与所述传输平台滑轨接触。
作为优选,所述高精度柔性智能传输平台系统,所述工业控制器还通过以太网接口连接PLC。
本发明与现有技术相比,主要优点包括:本发明可实现高速的多物品传输,能多轨迹输送、物品间距动态调整、物品速度动态规划、物品的卸载及操控等功能,解决传统输送系统的磨损,噪声,维护工作量大,难实现高速高精度运动控制和复杂的场景动作等缺点。
附图说明
图1为柔性智能传输平台的结构示意图;
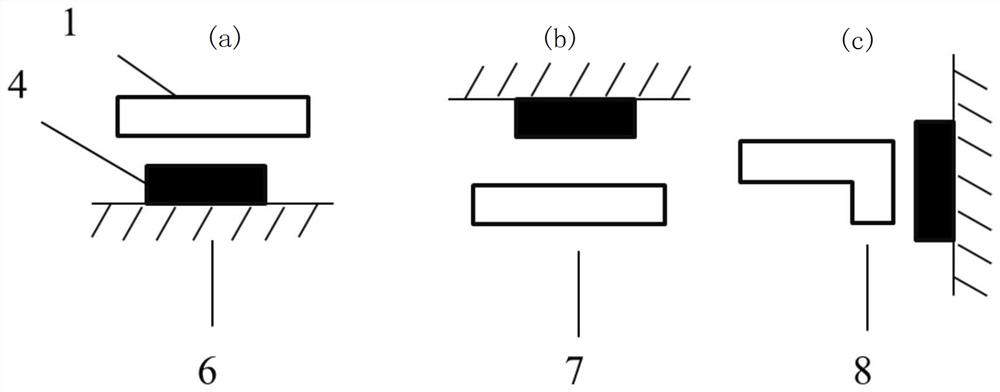
图2为动子托盘的安装方式示意图,其中(a)托盘朝上式,(b)托盘朝下式,(c)托盘侧向式;
图3为传输平台滑轨的形态布局示意图;
图4为基于EtherCAT工业总线的同步伺服控制系统架构图;
图中:
1-动子托盘;
2、3-永磁体;
4-定子线圈;
5-传感器;
6-托盘朝上式;
7-托盘朝下式;
8-托盘侧向式;
9-直线式滑轨;
10-矩形式滑轨;
11-环形式滑轨;
12-多轨道式滑轨;
13-可变电源;
14-EtherCAT总线;
15-工业控制器;
16-以太网(TCP/IP);
17-PLC。
具体实施方式
下面结合附图及具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。下列实施例中未注明具体条件的操作方法,通常按照常规条件,或按照制造厂商所建议的条件。
柔性智能传输平台如图1所示,一种高精度柔性智能传输平台系统,包括:
传输平台滑轨,其内部设有若干个定子线圈4,定子线圈4分别独立外接相应可变电源13(参见图4);
动子托盘1,安装在所述传输平台滑轨的上方、下方和/或侧面(参见图2),可沿所述传输平台滑轨移动;动子托盘1靠近所述传输平台滑轨的一侧设有若干个磁极异向交替排列的永磁体2、3;动子托盘1上设有用于位移测量的编码器标尺;
同步伺服控制系统,与可变电源13连接,用于控制可变电源13的供电参数;所述同步伺服控制系统包括工业控制器15,工业控制器15作为上位机通过EtherCAT总线14与可变电源13连接(参见图4)。
动子托盘1中设计均匀分布的永磁体2、3,与定子线圈4共同作用产生推力。通过给不同的线圈施加不同的励磁电流的方式产生运动的磁场。这一运动的磁场推动着动子的永磁体2、3一起运行,动子的推力大小通过调节线圈的励磁电流大小来实现。通过对动子的运动控制,实现动子在整个导轨上的自由运动,能够在静止和运动时进行制动、加速、定位等控制,具有极大地灵活性。
定子线圈4两侧设有用于感应动子托盘1位置的传感器5。
传输平台滑轨包括若干个通过环形式滑轨11、直线式滑轨9、矩形式滑轨10中的一种或多种拼接形成的多轨道式滑轨12(参见图3)。导轨通过接插件进行高精度拼装,确保导轨的无缝连接,实现导轨的长距离拼接和扩展。
所述传输平台滑轨的材质为硬质氧化铝的铝型材,确保了动子托盘1在运行时噪音非常小,以及保证良好的运行性能和低磨损,系统无需润滑。
动子托盘1的材质为采用固态铝合金。
动子托盘1通过滑轮与所述传输平台滑轨接触,滑轮能够在直线和曲线段上实现无背隙运行。
如图4所示,工业控制器14还通过以太网16接口连接PLC17,实现标准工业控制功能。
上述高精度柔性智能传输平台系统运行时,工业控制器15通过EtherCAT总线14控制可变电源13的供电参数,进而改变各定子线圈4中的电流,产生相应变化磁场,从而驱动所述传输平台滑轨上的动子托盘1移动和停止。动子托盘1上的编码器标尺可监测、反映动子托盘运动情况。
动子托盘中设计均匀分布的永磁体,与定子线圈共同作用产生推力,使托盘能够在整个导轨系统上的自由运动,实现加速、匀速、制动和定位等动作,实现了传输设备的功能,具有控制精度高,较大的运载能力以及较快的运行速度。
相较于传统的传输设备,本发明具有运行噪声低、爬坡能力强、转弯半径小、安全可靠性高、运营维护成本低的优势。
本发明可实现高速的多物品传输,能多轨迹输送、物品间距动态调整、物品速度动态规划、物品的卸载及操控等功能,解决传统输送系统的磨损,噪声,维护工作量大,难实现高速高精度运动控制和复杂的场景动作等缺点。
此外应理解,在阅读了本发明的上述描述内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
- 一种高精度柔性智能传输平台系统
- 一种用于柔性机械臂高精度定位的智能控制方法