一种萝卜拔取收获装置
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及农业机械技术领域,特别是涉及一种萝卜拔取收获装置。
背景技术
胡萝卜作为主要经济作物之一,在全球分布较广现有技术中,专利CN204560224U公开了一种胡萝卜收获机的夹持机构,其包括扶秧机构与夹持输送皮带,其中的扶秧机构是现有技术中的典型扶缨机构,这种扶秧机构对于胡萝卜左右两侧的萝卜叶具有较好的托扶效果,但是胡萝卜前后两侧的萝卜叶不能很好地被扶起,特别是对于倒伏严重的萝卜叶收获时进入夹持输送皮带的萝卜叶较少,拔取萝卜时,萝卜叶较容易断裂导致萝卜的根茎被留在土壤中。专利CN114223378A中公开了一种萝卜收获机器人,其前端具有扶禾组件,扶禾组件包括输送带与扶禾叉,扶禾叉包括垂直于输送带的竖直部分以及与竖直部分形成夹角的倾斜部分,这种结构试图将将萝卜侧方及前后方向的萝卜叶一起扶起,实际实施中由于缺少层次萝卜叶容易纠缠拉断甚至缠绕至扶禾组件上,难以达到预想的扶秧效果。因此本申请中旨在提供一种能够对萝卜叶倒伏严重的胡萝卜进行有效收获的萝卜拔取收获装置。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供一种能够使大部分萝卜叶进入夹持拔取装置内,防止拔取过程中萝卜叶断裂的萝卜拔取收获装置。
技术方案:为实现上述目的,本发明的萝卜拔取收获装置,其包括前后设置的扶缨机构与夹持拔取装置;所述扶缨机构包括左、右对称设置的主动扶缨组件,所述主动扶缨组件包括循环单元以及等距安装在所述循环单元上的第一扶缨杆,所述循环单元具有使所述第一扶缨杆由下往上运动的直线提升段;
所述扶缨机构还包括安装在所述主动扶缨组件前方的固定扶缨组件,所述固定扶缨组件包括前后延伸的第二扶缨杆,所述第二扶缨杆前低后高;
所述直线提升段上的所述第一扶缨杆向斜前方延伸或沿着左右方向延伸。
进一步地,所述第二扶缨杆为下凹的圆弧形。
进一步地,所述第二扶缨杆包括由空心管制成的主杆部以及安装在所述主杆部两端的锥形件,所述锥形件能够相对于所述主杆部拆卸。
进一步地,所述循环单元为链条,其上下两侧分别具有主动链轮与从动链轮;所述主动链轮被第一液压马达驱动运转。
进一步地,所述扶缨机构还包括将所述循环单元罩在其中的前侧罩板与后侧罩板;所述第二扶缨杆具有连接板部,所述连接板部通过所述支架固定在所述前侧罩板上。
进一步地,所述直线提升段的上端相对于下端向后倾斜。
进一步地,所述第一扶缨杆的根部具有转动连接部与块体部,所述转动连接部与所述循环单元建立转动连接关系;所述前侧罩板或后侧罩板内靠近所述直线提升段的一侧具有作用于所述块体部的导引板。
进一步地,所述夹持拔取装置包括两条前低后高的夹持带,两条所述夹持带共面对称安装;每条所述夹持带上靠近对称中心的带段为夹持带段,远离所述夹持带的带段为回程带段;两个所述夹持带的夹持带段平行安装或相互接触。
进一步地,所述拔取装置还包括作用于所述夹持带段的弹性压紧轮机构,以及作用于所述回程带段的保持轮机构。
进一步地,所述夹持带的前后两端分别具有从动带轮与主动带轮,所述主动带轮被第二液压马达驱动转动。
有益效果:本发明的萝卜拔取收获装置,通过对扶缨装置进行改进,设置了主动扶缨组件与固定扶缨组件,并对扶缨组件的布局与安装角度进行重新设置,使得在对萝卜叶倒伏严重的萝卜进行拔取时,固定扶缨组件能够先将萝卜两侧的叶子托起,主动扶缨组件再将萝卜前后的叶子扶起,如此层次分明地进行扶叶,如此萝卜上大部分的萝卜叶均能够进入拔取收获装置,拔取收获装置拔取萝卜的过程中,大部分萝卜叶参与到拔取作业中,可有效防止萝卜叶断裂导致漏拔的情况发生。
附图说明
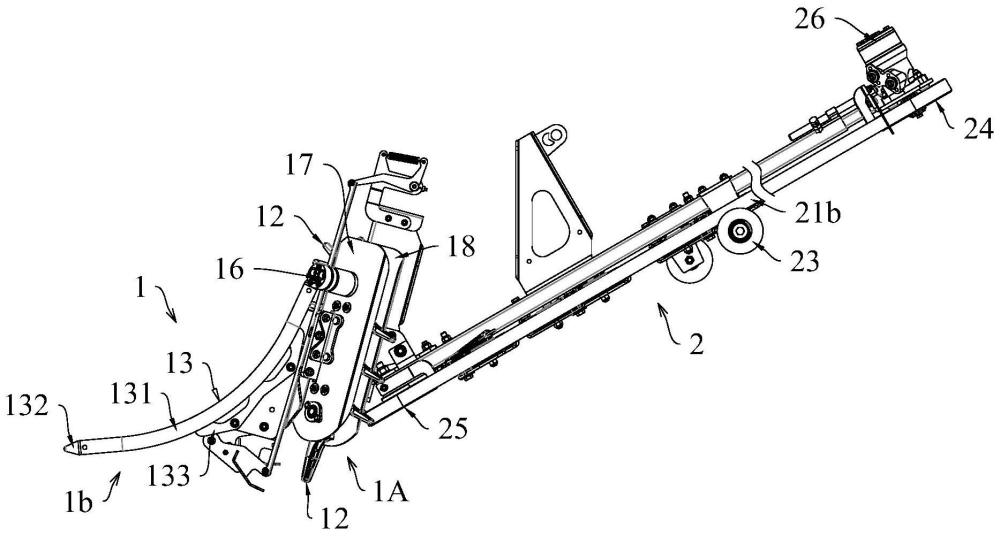
图1为萝卜拔取收获装置的侧视图;
图2为萝卜拔取收获装置前侧部分的第一立体结构图;
图3为萝卜拔取收获装置前侧部分的第二立体结构图;
图4为第一扶缨杆的结构图;
图5为后侧罩板的结构图;
图6为主动扶缨组件的内部结构图;
图中:1-扶缨机构;1A-主动扶缨组件;11-循环单元;11a-直线提升段;12-第一扶缨杆;121-转动连接部;122-块体部;12a-圆柱部;12b-保持部;12c-第一侧面;12d-第二侧面;1B-固定扶缨组件;13-第二扶缨杆;131-主杆部;132-锥形件;133-连接板部;14-主动链轮;15-从动链轮;16-第一液压马达;17-前侧罩板;18-后侧罩板;a-导引板;a1-导引部;a2-上过渡部;a3-下过渡部;19-支架;2-夹持拔取装置;21-夹持带;21a-夹持带段;21b-回程带段;22-弹性压紧轮机构;23-保持轮机构;24-主动带轮;25-从动带轮;26-第二液压马达。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如图1-3所示的萝卜拔取收获装置,其包括前后设置的扶缨机构1与夹持拔取装置2;所述扶缨机构1包括左、右对称设置的主动扶缨组件1A,所述主动扶缨组件1A包括循环单元11以及等距安装在所述循环单元11上的第一扶缨杆12,循环单元11带着其上的所有第一扶缨杆12循环运动,所述循环单元11具有使所述第一扶缨杆12由下往上运动的直线提升段11a;
所述扶缨机构1还包括安装在所述主动扶缨组件1A前方的固定扶缨组件1B,所述固定扶缨组件1B包括前后延伸的第二扶缨杆13,所述第二扶缨杆13前低后高;
所述循环单元11相对于前后方向倾斜安装,上述直线提升段11a即为每个链条11上靠近另一个链条11的一侧,所述直线提升段11a上的所述第一扶缨杆12向斜前方延伸或沿着左右方向延伸,优选为向斜前方延伸。
两个所述第二扶缨杆13之间具有间距,使得两个第二扶缨杆13之间形成有萝卜进入通道,在俯视方向上,直线提升段11a上的第一扶缨杆12均位于两个第二扶缨杆13之间的通道宽度范围内。
采用上述结构,扶缨机构1作业时,两个第二扶缨杆13分别位于萝卜种植行线的两侧,第二扶缨杆13向前运动的过程中,将萝卜上左右两侧的萝卜叶托起,如此,进入两组主动扶缨组件1A之间的萝卜的两侧的萝卜叶已经被托起,由循环单元11下端运动至直线提升段11a的第一扶缨杆12可将萝卜前后方向的萝卜叶扶起,如此,萝卜的各个方向上叶子基本都能被扶起,并进入夹持拔取装置2,大部分萝卜叶均能参与到拔取萝卜的过程中,可有效防止进入夹持拔取装置2的萝卜叶太少导致拔取萝卜过程中萝卜叶断裂。
优选地,上述直线提升段11a上的第一扶缨杆12向斜前方延伸,如此,在前后方向上第一扶缨杆12也有延伸分量,被第二扶缨杆13扶起的萝卜叶从后侧脱离第二扶缨杆13后,能够继续被处于直线提升段11a中上侧的第一扶缨杆12托住,此时,直线提升段11a下侧的第一扶缨杆12将萝卜前后侧的萝卜叶扶起,如此,萝卜上左右侧的萝卜与前后侧的萝卜叶分别被位于直线提升段11a中上侧与下侧的第一扶缨杆12托住,并喂入夹持拔取装置2内,实现大部分萝卜叶的喂入。
优选地,所述第二扶缨杆13为下凹的圆弧形,第二扶缨杆13的前端的切线相对于地面平置或相对于地面的夹角很小,后端的切线相对于地面的夹角很大。采用上述结构,第二扶缨杆13的前端能够更容易伸到萝卜叶的下侧,且相比于直杆,在第二扶缨杆13向前运动相同距离的前提下,圆弧形的第二扶缨杆13可将萝卜叶托起到更高的高度上。
优选地,所述第二扶缨杆13包括由空心管制成的主杆部131以及安装在所述主杆部131两端的锥形件132,所述锥形件132能够相对于所述主杆部131拆卸。如此有利于降低第二扶缨杆13的重量,实际使用中,第二扶缨杆13的前端贴着地面运动或锥入地面推开泥土向前运动,以便探到萝卜叶的下方,锥形件132能够在第二扶缨杆13向前运动时顶开泥土及障碍物,由于锥形件132为易损件,可定时更换。
优选地,所述循环单元11为链条,其上下两侧分别具有主动链轮14与从动链轮15;所述主动链轮14被第一液压马达16驱动运转。
优选地,所述扶缨机构1还包括将所述循环单元11罩在其中的前侧罩板17与后侧罩板18;所述第二扶缨杆13具有连接板部133,所述连接板部133通过所述支架19固定在所述前侧罩板17上。前侧罩板17与后侧罩板18将循环单元11罩在内部,第一扶缨杆12从两个罩板之间的间隙中伸出,可防止萝卜也卷入循环单元11内部造成机器故障。
优选地,所述直线提升段11a的上端相对于下端向后倾斜,如此,直线提升段11a上的第一扶缨杆12向斜上方倾斜,并与前侧罩板17的边缘之间形成V槽,被直线提升段11a上的第一扶缨杆12托起的萝卜叶能够较好地维持在所述第一扶缨杆12上,不容易滑开。
夹持拔取装置2的前端对着直线提升段11a的下侧,在侧向上看,直线提升段11a上侧的第一扶缨杆12的位置在夹持拔取装置2前端的后侧,如此,在萝卜叶的根部进入夹持拔取装置2的过程中,萝卜叶仍处于被托起的状态。
优选地,如图4所示,所述第一扶缨杆12的根部具有转动连接部121与块体部122,所述转动连接部121与所述循环单元11建立转动连接关系,此处转动连接部121为铰接孔,所述块体部122具有围绕所述转动连接部121设置的圆柱部12a以及具有平直侧面的保持部12b,保持部12b具有与第一扶缨杆12的延伸方向垂直的第一侧面12c以及连接所述第一侧面12c与所述圆柱部12a的第二侧面12d,所述第二侧面12d与所述第一侧面12c之间的夹角为钝角且与所述圆柱部12a的圆柱面相切;如图5、6所示,所述后侧罩板18内靠近所述直线提升段11a的一侧具有作用于所述块体部122的导引板a。所述导引板1a具有平行于所述直线提升段11a的直线导引部a1,所述直线导引部a1的上下两侧分别具有上过渡部a2与下过渡部a3。直线提升段11a上的第一扶缨杆12的第一侧面12c与所述直线导引部a1接触,且保持部12b位于圆柱部12a的下侧,如此,第一扶缨杆12受到向下的作用力可保持与直线导引部a1垂直的状态。上过渡部a2与下过渡部a3分别由首尾连接的多段板体构成,相邻板体之间形成钝角角度,且上过渡部a2及下过渡部a3均沿着循环单元11的走向延伸。第一扶缨杆12运动至直线导引部a1的顶部后,在块体部122与上过渡部a2接触过程中第一扶缨杆12逐渐相对于循环单元11转动,以使得挂在第一扶缨杆12上的萝卜叶与第一扶缨杆12逐渐脱开,防止萝卜叶跟随第一扶缨杆12到循环单元11的回程段以至将萝卜叶拉断。块体部122与上过渡部a2脱开后,第一扶缨杆12沿着循环单元11上的回程段运动时,第一扶缨杆12相对于循环单元11处于能够自由转动的状态,直至第一扶缨杆12到达循环单元11的下端,下过渡部a3依次作用于圆柱部12a、第二侧面12d以及第一侧面12c以将第一扶缨杆12的姿态导正后,第一扶缨杆12进入直线提升段11a。如此,第一扶缨杆12沿着循环单元11上的回程段运动时不会影响邻行的萝卜叶。
优选地,所述夹持拔取装置2包括两条前低后高的夹持带21,两条所述夹持带21共面对称安装;每条所述夹持带21上靠近对称中心的带段为夹持带段21a,远离所述夹持带21的带段为回程带段21b;两个所述夹持带21的夹持带段平行安装或相互接触。
优选地,所述拔取装置2还包括作用于所述夹持带段的弹性压紧轮机构22,以及作用于所述回程带段的保持轮机构23,所述保持轮机构23用于防止所述回程带段下坠。
优选地,所述夹持带21的前后两端分别具有从动带轮25与主动带轮24,所述主动带轮24被第二液压马达26驱动转动。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种农业大白菜自动垂直拔取收获机
- 一种萝卜收获机器人感应拔取结构及萝卜收获机器人
- 一种白萝卜拔取式联合收获用减粘降阻松土铲及收获机